

Veritakは、高速Verilog HDLシミュレータです。WindowsXP/Windows2000/Vista(32ビット/64ビット)/Windows7(32ビット/64ビット)の環境下で動作します。
LSI エンジニアによるプロフェッショナルLSIエンジニア為の設計ツールですが、FPGAの開発ツールとしてもご利用いただけます。
オリジナルCPUをFPGAで走らせる、20年前には、考えられなかった夢が今、現実になろうとしています。
FPGAでCPUを自作したい方のために、オープンコアで、ソフトIPコアや、既存の設計例を紹介しています。設計例を通じて、プロセッサアーキテクチャ、HDLコーディングスタイルの研究に役立てば幸いです。
Veritak 3.84Dをリリースしました。
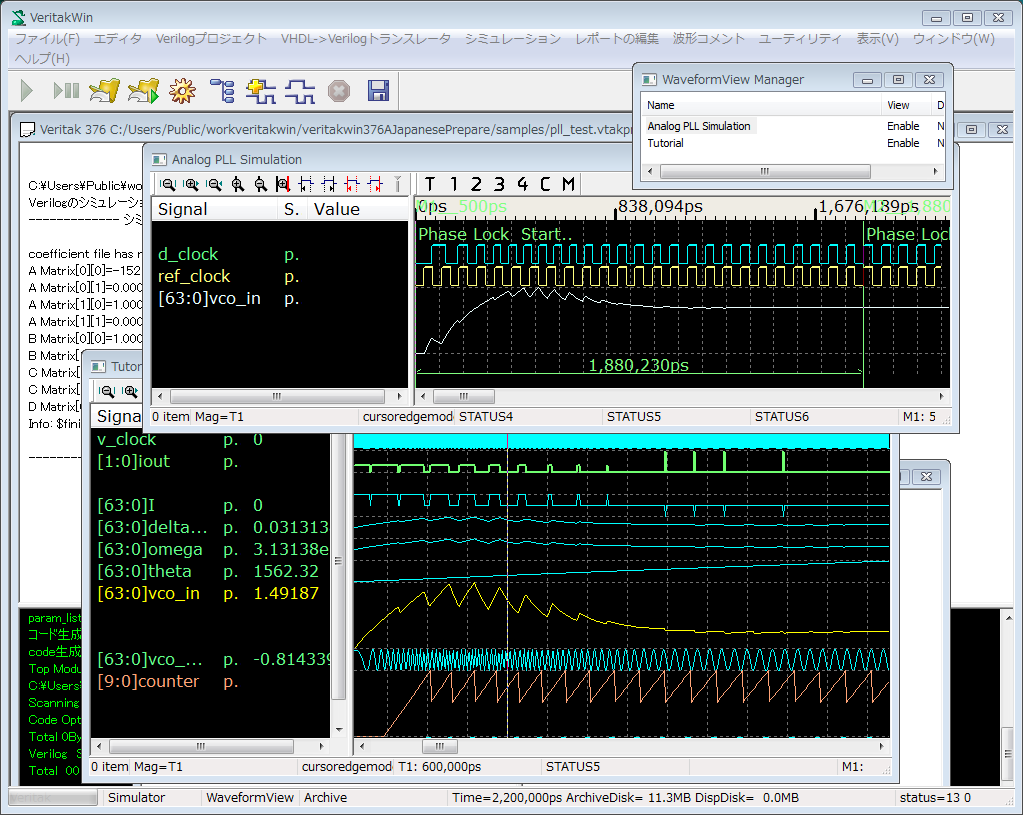
アナログ波形表示にAutomatic Scalingを適用しました。
Veritak 3.74Aをリリースしました。マルチモニタに対応しました。
下は、Windows7 64ビット環境デュアルディスプレイ(3800x1200 (1920+1280/1200(1024)))でのスナップショットです。
Veritak 3.73Aをリリースしました。
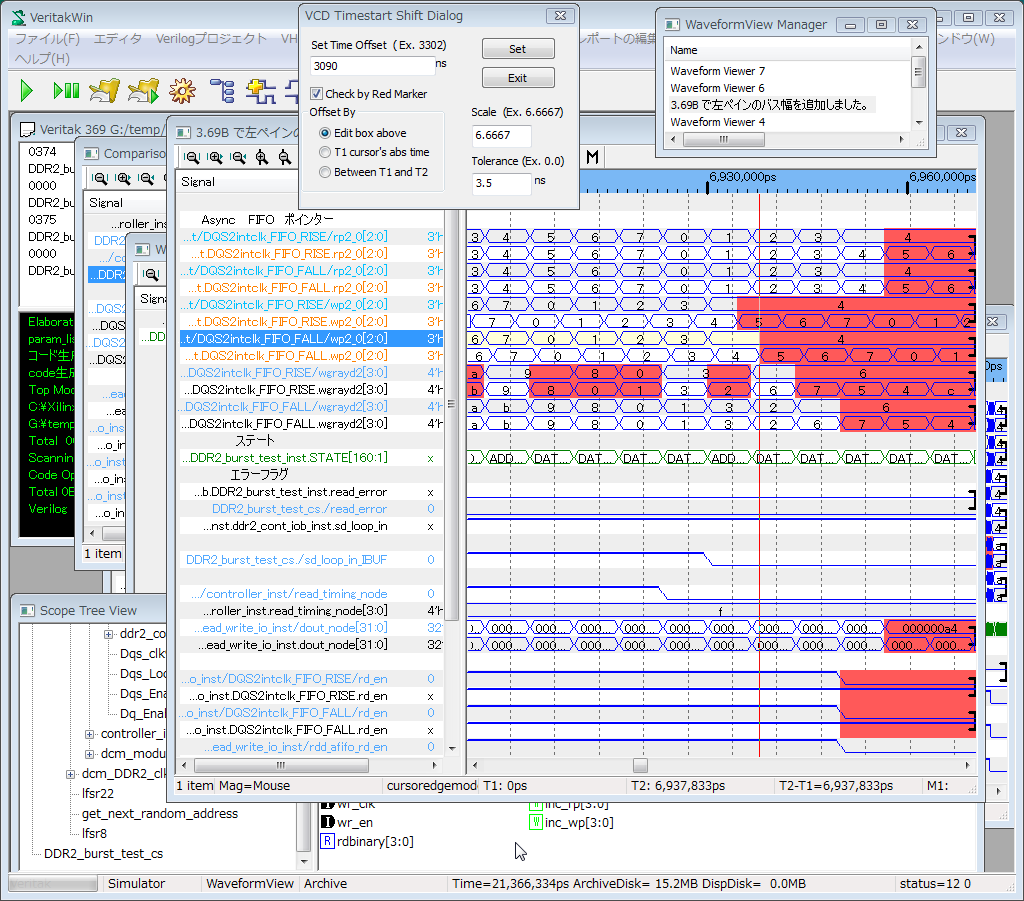
波形比較機能を実装しました。相違点が赤で示されます。
RTL-VCD 波形比較 ビデオチュートリアル(英語)
VCD-VCD 波形比較ビデオチュートリアル(英語)
下は、DDR2 RTLとChipScope(TM)生成VCDを取り込んだ波形比較です。
Windows7 64ビット上で動作させてみました。
NPP++5.3用プラグインUNICODE用をリリースしました。
3.54Dをリリースしました。
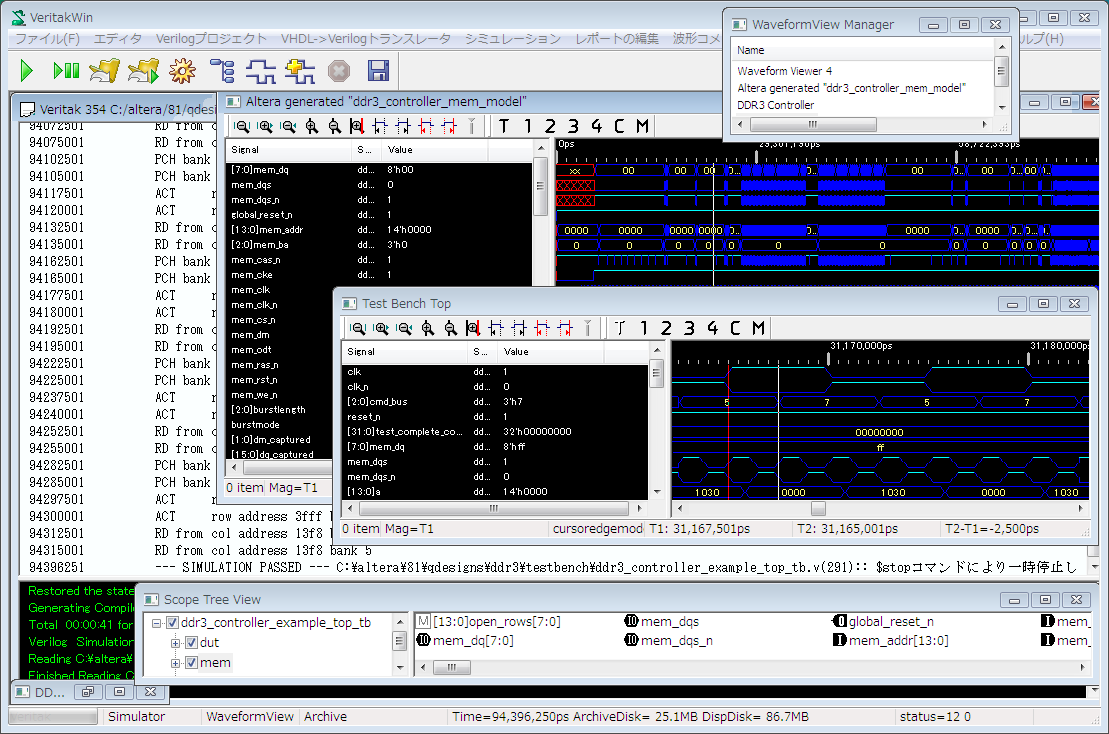
アルテラ MegaWizardを使用してStratix III 400MHz DDR3コントローラをシミュレーションしてみました。
3.53Aをリリースしました。
ズーム機能を強化しました。Shift+D&Dで拡大、Shift+右クリックで縮小します。
3.46Cで、WaveformnView上の検索機能を追加を追加しました。
3.45AでPro版のライセンスにMACアドレスを追加しました。
可搬のUSB-LANアダプターをドングルとして使えます。
3.44Cスナップショットです。
Vanheesbeke Stefaan (ベルギー)さんからLinsysvpi.dllのupdateを頂きました。
3.42A スナップショットです。
SyncWavefomsとSyncCursorにチェックを入れるとマルチView下において同じタイムスケール上で、連動します。
3.41Kスナップショットです。
Vanheesbeke Stefaan (ベルギー)さん、から状態空間形式でのリニアシステムシミュレータのVPIコードをご提供いただきました。詳しくは チュートリアル2.9.2をご参照ください。
(VC7プロジェクト、C++ソースは、パッケージに同梱しています。)
3.36A スナップショットです。
3つのVCDファイル(たとえば、min,typ,max)を読み込み一つのViewとして表示できる機能を実装しました。また、ギガバイトVCDファイルの読み込みに対応しました。
VCDファイルをVerilogプロジェクト中に定義することが出来ます。
3.33A スナップショットです。
MixiでのVeritak友の会が開設約1年で100人を突破しました。
Saveするインスタンスを指定できます。(Pro-VersionOnly) またライブラリのコンパイル方法を改善しており、必要なファイルのみのコンパイルになります。
また、3.33Aでは、WaveformViewのメタコピーをサポートします。ビットマップと違い、Word/Excel/Visio上で、拡大縮小しながら貼り付けても体裁が崩れません。
下図は、YACCのキャッシュ動作部波形をメタコピーしたものです。
Visioでは、「グループ解除」を行うと部分編集できるようです。
以下ユーザさまのコメントと提供画像です。
「Ver 3.33Aでサポートされたメタコピーですが、
Visioへ貼り付け「図形」→「グループ化を解除」すると、
かなり良い感じにグループ化を解除できました。 」
Verilog HDLでCPU設計入門を更新しました。
11月号のDWM記事「クロック・データ・リカバリ.回路の機能を.ディジタル・シミュレータで検証する.」をシミュレーションしてみました。
また、VPIによる高速化を試してみました。詳しくは、VPIのページ「Verilog HDLでMixed-Signal」をご参照ください。
Snapshot From 3.21B save/restore
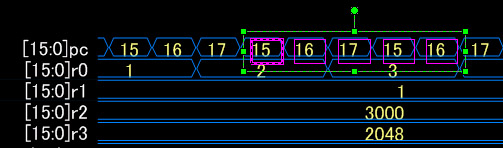
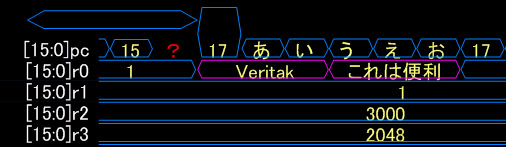
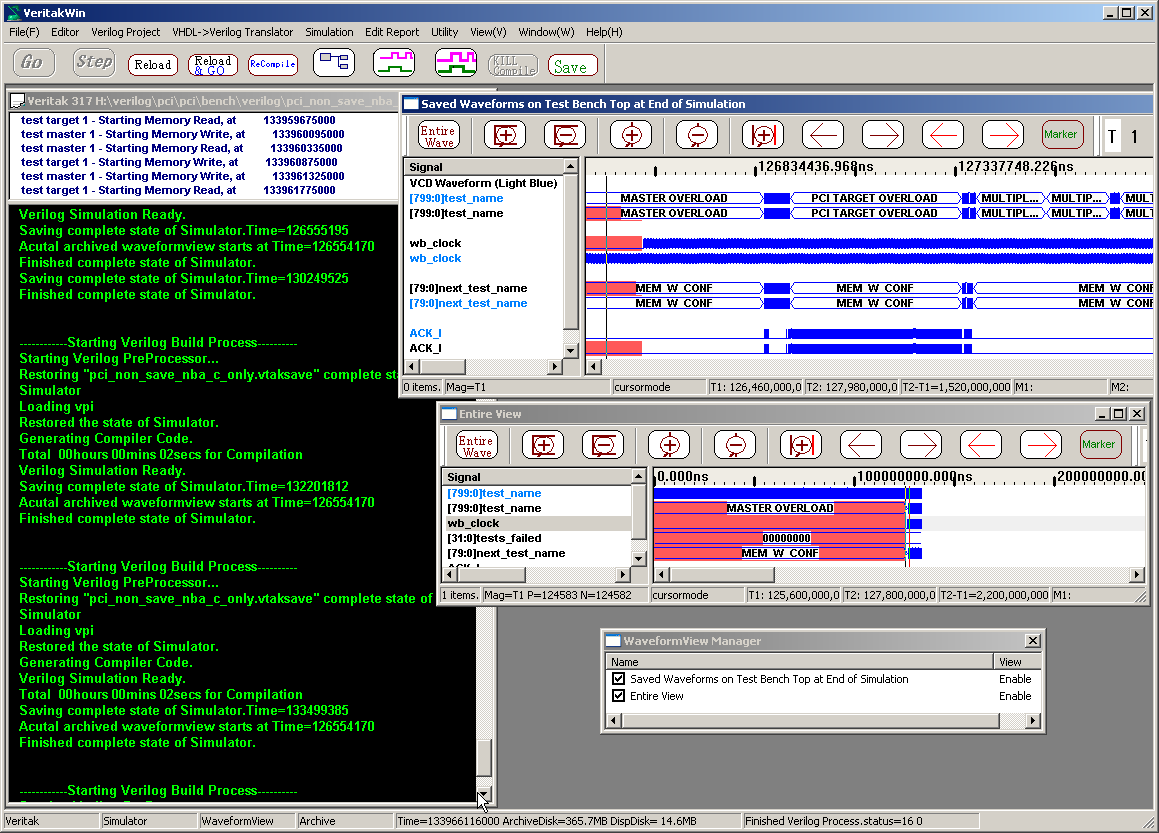
Veritakのsave/restoreは、ユニークです。シミュレータの全内部状態を任意時刻に保存/再現できることは勿論、すべての信号履歴も保存しています。また、多様なトリガ条件をサポートしており、トリガ条件を満たすまでSaveしないこともできます。勿論64ビットマルチビューアとFast Modeは、本モードでも使用可能ですので、従来よりスピーディにエラーを収束させることが出来ます。特に長期テストでのエラー解析に有効です。単に波形保存、RUN-TIMEでのメモリ削減としても活用が可能です。
下は、PCIコアで126ms後にSave開始したものを何回かRestoreした様子です。Save前は、赤色で表示されます。波形Saveがない分、目的地まで快速に行けます。
Restoreした状態からもシミュレーションは、継続しています。別に保存していたVCD波形(TOP階層だけですが、1GBもありました)も表示させていますが、当然ながら同じ結果になります。
Snapshot From 3.10A Giga Byte Viewer
Waveform Viewerを仮想化技術使い64ビット空間にマップしました。下は、OpencoresのPCIコアの任意の信号をWaveformViewerに加えてシミュレーションしている様子です。Veritakでは、全波形を圧縮していますので、VCDなら恐らく200GByte近くになるだろう波形も下では、数GB程度に圧縮されています。WaveformViewerは、選択された信号をメモリ上に解凍、展開しますが32ビットユーザ空間制限の為、1GBYTEを超える表示は難がありました。Veritak Giga Byte Viewerでは、この制限がなくなります。(下で、7.5GBをアーカイブに、3GBをディスプレイ展開メモリに消費しています。)また、数百MB規模のVCDでも表示が可能になります。
Version 3.09 から、画面の移動は、下のようにタイトルバーのクリック、または、CTRL-TABで移動が便利です。
Snapshot from 3.01
Verilog HDL設計の定本、「わかるVerilog HDL入門」で記述されているTVゲームをシミュレーションしてみました。ソフトウェアによるエミュレータではなく、ハードウェアをシミュレーションしている点にご注目ください。こういう芸当ができるようになったのは、新しく搭載したFast ModeとVPIによるものです。
全VPI ソース(C++DLL) 、GUI ソース(C#)については、VPIのページで紹介しています。
Snapshot from Version 3.00A
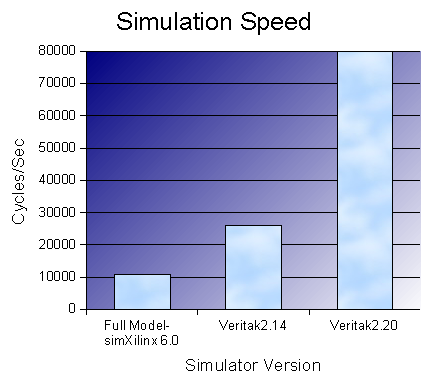
、Verilatorサイトにあるベンチマークの実測値(Athlon3800+Dual)です。詳しいレポートです。
Veritakコンパイルテクノロジーによる一つの成果です。
特徴
- 簡単な操作でシミュレーションが実行できます。行数制限はありません。
- Verilog2001主要構文を実装しています
- Drag&Drop で、*.vcd=>VCD Viewer,*.vhd=>VHDLトランスレート、*.v=>Verilogコンパイル
- VHDL.・Verilog HDLのSDIシンタックスハイライトエディタ付シミュレータです。
- 信号は、全て圧縮して記録しますので、後から見たい信号を追加して再シミュレーションする必要はありません。
- メモリの内容は、シミュレーション時にエディタからダンプも可能です
- ソースブレークポイント設定機能・ステップ実行機能付です。
- ツールチップが、エディタについていますので、現在信号値が、エディタ上で得られます。
- 波形ビューアは、MDIマルチウィンドウで、ツールチップ付きです
- VCD ビューアとしてもご利用可能です。フォーマットSave付。
- VHDLからVerilog HDLへのソーストランスレータ付きシミュレータです。
- 階層ビューア付きです。
- VPIで、線形システムシミュレータを搭載しています。MATALB等が生成するシステム行列を入力とするアナログシミュレーションが可能です。(VPIソースは、本サイトに掲載しています。)
- 文法エラー等のエラー箇所に簡単に飛べます。
- Version1.11からAltera/Xilinxのポストレイアウトゲートシミュレーションに対応しました。
- Version1.19からWaveformView上で、VHDLライクにステート名の名前表示が可能になりました。
- Version1.19より、簡易Lint機能が付きました。
- Version1.21より、WaveformViewのカスタマイズを可能にしました。
- Version1.24より、トレース機能(Viewの変化点から、ドライバソース行へのジャンプ機能、Why X?機能(Resolver(複数のドライバ(波形表示、ソースエディタへのジャンプ機能)が搭載されました。また、エディタ上でのparameter ToolTip表示機能が追加されました。Reloadで、時間軸とTree Scope、カーソルを継続します。
- Version1.25より、メモリ内容をWaveformViewに追加しました。
- Version1.28より、VeriPad上で、Staticトレース機能がサポートされます。既に搭載済みのDynamic Trace機能と合わせてご利用いただけます。VeriPad,ScopeTreeView,WaveformViewが連携し,飛びたいところに飛べる強力な機能です。さらに、VeriPad(ソースエディタ)のカスタマイズ機能説明が追加され、VeriPad VC7ソースも(NYSL)で公開しました。
- Version 1.29より、WaveformViewの並びをTextでSaveする機能が付加されました。MODELSIM(TM)で読み込み可能です。
- Version 1.41よりシミュレーションスピードをアップしました。
- Version 1.42よりグループ機能をWaveformViewに追加しました。
- Version 1.43より、ロジアナのパルスカウント機能を追加しました。
- Version 1.45より、Verilog2001主要構文を実装しました。
- Version 1.47より Drag & Dropに対応しました。
- Version 1.50で Xilinx coregenlibに対し、最適化を行いました。
- Version 1.52で VCD 単体 ビューアとしてのフォーマットSaveが可能になりました。
- Version 1.53でバックアノテーションの高速化を行いました。
- Version 1.6でGUI系の機能強化を行いました。
- Version 1.71でLint機能を強化しました。
- Version 1.75でFileIO系のサポートを強化しました。
- Version 1.79でVCD Viewerの最大読み込み可能サイズが2-6倍になりました。$dist_normal 等のシステムファンクションを追加サポートしました。
- Version 2.03でsave/restore 機能を実装しました。
- Version 2.16でVPIのサポートを開始しました。
- Version 3.00で、シミュレーションスピードがアップしました。
- Version 3.09で、Viewerが64ビットになりました。
- Version 3.11で、マルチビューアGUIの操作性が向上しました。
- Version 3.18でコマンドラインをサポートしました。
- Version 3.26でprimitive全構文をサポートしました。
- Version 3.32BでSaveするインスタンス指定が出来るようになりました。ライブラリコンパイル方法を改善しました。
- Version 3.34でVCD ビューアが大容量のVCDファイルに対応しました。
- Version 3.43でNotepad++に対応しました。
- Version 3.71で、強力な、RTL-VCD波形比較/VCD-VCD波形比較 機能を実装しました。
- Version 3.73Dでマルチモニタに対応しました。
- Version 3.77Eで強力なアナログ表示になりました。OVLライブラリファイルに対応しました。
What's New
May.23.2011 Veritak 3.84Dをリリースしました。
Apr.11.2011 Veritak 3.84Cをリリースしました。
Apr.11.2011 Veritak 3.84Bをリリースしました。
Jan.28.2011 Veritak 3.83Bをリリースしました。
Oct.21.2010 Veritak 3.83Aをリリースしました。
Oct.18.2010 Veritak 3.80Gをリリースしました。
Jul.29.2010 Veritak 3.80Fをリリースしました。
Jun.17.2010 Veritak 3.80Cをリリースしました。
May.28.2010 Veritak 3.80Aをリリースしました。
May.18.2010 Veritak 3.79Fをリリースしました。
May.10.2010 Veritak 3.79Eをリリースしました。
Apr.21.2010 Veritak 3.79Dをリリースしました。
Apr.06.2010 Veritak 3.79Bをリリースしました。
Mar.07.2010 Veritak 3.77Eをリリースしました。
Mar.07.2010 Veritak 3.77Bをリリースしました。
Mar.03.2010 Veritak 3.77Aをリリースしました。
Jan.18.2010 Veritak 3.75Aをリリースしました。
Jan.12.2010 Veritak 3.74Dをリリースしました。
Oct.19.2009 Veritak 3.74Aをリリースしました。
Sep.4.2009 Veritak 3.73Dをリリースしました。
Aug.8.2009 Veritak 3.73Aをリリースしました。
Jul.23.2009 Veritak 3.72Aをリリースしました。
Jul.7.2009 Veritak 3.71Cをリリースしました。
Jul.6.2009 Veritak 3.71Bをリリースしました。
Jul.5.2009 Veritak 3.71Aをリリースしました。
Jul.2.2009 Veritak 3.70Bをリリースしました。
Jul.2.2009 Veritak 3.70Aをリリースしました。
Jun.29.2009 Veritak 3.69Cをリリースしました。
Jun.26.2009 Veritak 3.69Bをリリースしました。
Jun.25.2009 Veritak 3.69Aをリリースしました。
Jun.23.2009 Veritak 3.68Aをリリースしました。
Jun.20.2009 Veritak 3.67Aをリリースしました。
Jun.19.2009 Veritak 3.66Aをリリースしました。
May.31.2009 Veritak 3.65Aをリリースしました。
May.22.2009 Veritak 3.63Aをリリースしました。
May.2.2009 Veritak 3.62Aをリリースしました。
Apr.29.2009 Veritak 3.61Bをリリースしました。
Apr.29.2009 Veritak 3.61Aをリリースしました。
Apr.19.2009 Veritak 3.60Aをリリースしました。
Apr.17.2009 Veritak 3.59Cをリリースしました。
Apr.11.2009 Veritak 3.59Bをリリースしました。
Apr.7.2009 Veritak 3.59Aをリリースしました。
Mar.29.2009 Veritak 3.55Bをリリースしました。
Mar.21.2009 Veritak 3.54Hをリリースしました。
Jan.12.2009 Veritak 3.54Dをリリースしました。
Jan.1.2009 Veritak 3.54Aをリリースしました。
Dec.17.2008 Veritak 3.53Cをリリースしました。
Nov.26.2008 Veritak 3.53Aをリリースしました。
Nov.15.2008 Veritak 3.52Cをリリースしました。
Nov.15.2008 Veritak 3.52Bをリリースしました。
Nov.12.2008 Veritak 3.51Cをリリースしました。
Oct.23.2008 Veritak 3.51Aをリリースしました。
Sep.2.2008 Veritak 3.50Aをリリースしました。
Aug.21.2008 Veritak 3.49Cをリリースしました。
Aug.6.2008 Veritak 3.49Bをリリースしました。
Jul.26.2008 Veritak 3.48Aをリリースしました。
Jul.2.2008 Veritak 3.46Cをリリースしました。
Jun.17.2008 Veritak 3.45Eをリリースしました。
Jun.15.2008 Veritak 3.45Dをリリースしました。
Jun.12.2008 Veritak 3.45Aをリリースしました。
Jun.6.2008 Veritak 3.44Cをリリースしました。
Apr.25.2008 Veritak 3.43Lをリリースしました。
Apr.10.2008 Veritak 3.43Gをリリースしました。
Mar.13.2008 Veritak 3.43Dをリリースしました。
Jan.31.2008 Veritak 3.42Aをリリースしました。
Jan.20.2008 Veritak 3.41Kをリリースしました。
Dec.19.2007 Veritak 3.41Jをリリースしました。
Nov.26.2007 Veritak 3.41Gをリリースしました。
Nov.20.2007 Veritak 3.41Fをリリースしました。
Oct.30.2007 Veritak 3.41Eをリリースしました。
Oct.16.2007 Veritak 3.40Aをリリースしました。
Aug.30.2007 Veritak 3.39Dをリリースしました。
Aug.29.2007 Veritak 3.39Cをリリースしました。
Aug.22.2007 Veritak 3.39Aをリリースしました。
Aug.12.2007 Veritak 3.38Hをリリースしました。
Aug.4.2007 Veritak 3.38Gをリリースしました。
Jul.29.2007 Veritak 3.38Fをリリースしました。
Jul.14.2007 Veritak 3.38Eをリリースしました。
Jul.14.2007 Veritak 3.38Dをリリースしました。
Jul.13.2007 Veritak 3.38Cをリリースしました。
Jul.12.2007 Veritak 3.38Bをリリースしました。
Jul.11.2007 Veritak 3.38Aをリリースしました。
Jul.7.2007 Veritak 3.37Aをリリースしました。
May.30.2007 Veritak3.36Eをリリースしました。
May.24.2007 Veritak3.36Dをリリースしました。
May.23.2007 Veritak 3.36Aをリリースしました。
May.20.2007 Veritak 3.36Aをリリースしました。
May.13.2007 Veritak 3.35Bをリリスしました。
Apr.26.2007 Veritak 3.34Fをリリースしました。
Apr.24.2007 Veritak 3.34Eをリリースしました。
Apr.19.2007 Veritak 3.34Dをリリースしました。
Apr.14.2007 Veritak 3.34Aをリリースしました。
Apr.7.2007 Veritak 3.32Eをリリースしました。
Apr.2.2007 Veritak 3.32Dをリリースしました。
Mar.31.2007 Veritak 3.32Cをリリースしました。
Mar.30.2007 Veritak 3.32Bをリリースしました。
Mar.25.2007 Veritak 3.32Aをリリースしました。
Mar.20.2007 Veritak 3.31Aをリリースしました。
Mar.11.2007 Veritak 3.30Bをリリースしました。
Mar.8.2007 Veritak 3.30Aをリリースしました。
Mar.4.2007 Veritak 3.29Eをリリースしました。
Feb.27.2007 Veritak 3.29Cをリリースしました。
Feb.6.2007 Veritak 3.28Cをリリースしました。
Feb.5.2007 Veritak 3.28Bをリリースしました。
Jan.30.2007 Veritak 3.27Aをリリースしました。
Jan.19.2007 Veritak 3.26Bをリリースしました。
Jan.10.2007 Veritak 3.26Aをリリースしました。
Jan1.2007 Veritak 3.25Bをリリースしました。
Dec.31.2006 Veritak 3.25Aをリリースしました。
Dec.31.2006 Veritak 3.24Fをリリースしました。
Dec.30.2006 Veritak 3.24Eをリリースしました。
Dec.30.2006 Veritak 3.24Dをリリースしました。
Dec.29.2006 Veritak 3.24Cをリリースしました。
Dec.17.2006 Veritak 3.24Bをリリースしました。
Dec.14.2006 Veritak 3.24Aをリリースしました。
Dec.13.2006 Veritak 3.23Fをリリースしました。
Dec.5.2006 Veritak 3.23Eをリリースしました。
Nov.14.2006 Veritak 3.23Cをリリースしました。
Nov.14.2006 Veritak 3.23Bをリリースしました。
Oct.30.2006 Veritak 3.23Aをリリースしました。
Oct.22.2006 Veritak 3.21Gをリリースしました。
Oct.21.2006 Veritak 3.21Fをリリースしました。
Oct.20.2006 Veritak 3.21Eをリリースしました。
Oct.19.2006 Veritak 3.21Dをリリースしました。
Oct.18.2006 Veritak 3.21Cをリリースしました。
Oct.12.206 Veritak 3.21Bをリリースしました。
Oct.8.2006 Veritak 3.21Aをリリースしました。
Oct.6.2006 Veritak 3.20Aをリリースしました。
Oct.3.2005 Veritak 3.19Aをリリースしました。
Oct.1.2006 Veritak 3.18Aをリリースしました。
Sep.16.2006 Veritak 3.17Aをリリースしました。
Sep.7.2006 Veritak 3.16Bをリリースしました。
Sep.6.2006 Veritak 3.16Aをリリースしました。
Aug.31.2006 Veritak 3.15Cをリリースしました。
Aug.30.2006 Veritak 3.15Aをリリースしました。
Aug.28.2006 Veritak 3.14Cをリリースしました。
Aug.25.2006 Veritak 3.14Bをリリースしました。
Aug.23.2006 Veritak 3.13Aをリリースしました。
Aug.22.2006 Veritak 3.12Aをリリースしました。
Aug.17.2006 Veritak 3.11Bをリリースしました。
Aug.15.2006 Veritak 3.11Aをリリースしました。
Aug.11.2006 Veritak 3.10Bをリリースしました。
Aug.11.2006 Veritak 3.10Aをリリースしました。
Aug.10.2006 Veritak 3.09Aをリリースしました。
Jul.30.2006 Veritak 3.08Aをリリースしました。
Jul.29.2006 Veritak 3.07Aをリリースしました。
Jul.27.2006 Veritak 3.06Aをリリースしました。
Jul.25.2006 Veritak 3.05Aをリリースしました。
Jul.19.2006 Veritak 3.04Cをリリースしました。
Jul.18.2006 Veritak 3.04Aをリリースしました。
Jul.16.2006 Veritak 3.03Cをリリースしました。
Jul.13.2006 Veritak 3.02Aをリリースしました。
Jul.2.2006 Veritak 3.01A をリリースしました。
Jun.30.2006 Veritak 3.00Aをリリースしました。
Jun.18.2006 Veritak 2.16Aをリリースしました。
Jun.12.2006 Veritak 2.15Aをリリースしました。
May.28.2006 Veritak 2.13Aをリリースしました。
May.19.2006 Veritak 2.12Bをリリースしました。
May.15.2006 Veritak 2.12Aをリリースしました。
May.8.2006 Veritak 2.11Cをリリースしました。
May.7.2006 Veritak 2.11Aをリリースしました。
May.2.2006
あるユーザ様が、MIXIで、コミュニティを立ち上げてくださいました。興味のある方は、 お気軽にご参加下さい。
Apr.12.2006 Veritak 2.10Aをリリースしました。
Apr.7.2006 Veritak 2.09Aをリリースしました。
Mar.25.2006 Veritak 2.08Aをリリースしました。
Mar.19.2006 Veritak 2.07Aをリリースしました。
Mar.15.2006 リンク集を追加しました。
Mar.9.2006 Veritak 2.06Aをリリースしました。
Mar.6.2006 Veritak 2.05Aをリリースしました。
Mar.2.2006 Veritak 2.04Aをリリースしました。
Feb.27.2006 Veritak 2.03Bをリリースしました。
Feb.26.2006 Veritak 2.03Aをリリースしました。
Jan.29.2006 Veritak 2.00Aをリリースしました。
Jan.24.2006 Veritak 1.99A をリリースしました。
Jan.18.2006 Veritak 1.98Aをリリースしました。
Jan.5.2006 Veritak 1.97Aをリリースしました。
Dec.23.2005 Veritak 1.96Aをリリースしました。
Dec.22.2005 Veritak 1.95Aをリリースしました。
Dec.15.2005 Veritak.1.94Aをリリースしました。
De.12.2005 オープンコアYACCクロスコンパイラを、Updateしました。(浮動小数点演算がnewlibで可能)
Dec.9.2005 Veritak 1.93Aをリリースしました。
Dec.5.2005 Veritak 1.92Aをリリースしました。
Dec.1.2005 Veritak 1.91Aをリリースしました。
Nov.29.2005 Veritak 1.90Aをリリースしました。
Nov.23.2005 Veritak 1.89Aをリリースしました。
Nov.19.2005 Veritak 1.88Bをリリースしました。
Nov.14.2005 Veritak 1.86Aをリリースしました。
Nov.13.2005 Veritak 1.85Aをリリースしました。
Nov.10.2005 Veritak 1.84Aをリリースしました。
Nov.5.2005 Veritak 1.83Aをリリースしました。
Oct.31.2005 Veritak 1.82Aをリリースしました。
ベンチマーク結果を更新しました。
Oct.21.2005 Veritak 1.81Aをリリースしました。
Oct.20.2005 Veritak 1.80Bをリリースしました。
Oct.18.2005 Veritak 1.80Aをリリースしました。
Oct.13.2005 LINK 集を追加しました。
Oct.12.2005 Veritak 1.79Aをリリースしました。
Oct.7.2005 Veritak 1.78Aをリリースしました。
Oct.6.2005 Veritak 1.77Aをリリースしました。
Oct.4.2005 Veritak 1.76Aをリリースしました。
Sep.20.2005 Veritak 1.75Aをリリースしました。
Sep.16.2005オープンコアをUpdateしました。
Sep.13.2005 Veritak 1.74Aをリリースしました。
Sep.8.2005 Veritak 1.73Aをリリースしました。
Aug.30.2005 Veritak 1.72Aをリリースしました。
Aug.7.2005 Veritak 1.71Aをリリースしました。
Aug.4.2005 オープンコアをUpdateしました。(YACC FAQ.7追加、FZ80の評価)
Jul.11.2005 Veritak 1.70Aをリリースしました。
Jul.7.2005 Veritak 1.69Bをリリースしました。
Jul.6.2005 Veritak 1.69Aをリリースしました。
Jul.4.2005 Veritak 1.68Aをリリースしました。
Jun.27.2005Veritak 1.67Aをリリースしました。
Jun.25.2005Veritak 1.66Aをリリースしました。
Jun.23.2005Veritak 1.65Bをリリースしました。
Jun.22.2005Veritak 1.65Aをリリースしました。
Jun.17.2005Veritak 1.64Aをリリースしました。
Jun.14.2005 Veritak 1.63Bをリリースしました。
Jun.1.2005 Veritak 1.62Aをリリースしました。
May.19.2005 Veritak 1.61Aをリリースしました。
May.12.2005 Veritak 1.60Aをリリースしました。
May.9.2005 Veritak 1.59Aをリリースしました。
May.7.2005 オープンコア、アナログPLLのシミュレーションをアップしました。
May.6.2005 オープンコア、Openrisc CPUの評価をアップしました。
May.5.2005 Veritak 1.58Aをリリースしました。
May.5.2005 オープンコア、CRCのRTL自動生成プログラムの解析をアップしました。
May.1.2005 Veritak 1.57Bをリリースしました。
May.1.2005 Veritak 1.57Aをリリースしました。
Apr.26.2005 OpencoresでProject YACCがスタートしました。
Apr.25.2005 Veritak 1.56Aをリリースしました。
Apr.25.2005 Veritak 1.55Aをリリースしました。
Apr.19.2005 Veritak 1.54Aをリリースしました。
Apr.15.2005 オープンコアYACCをUpdateしました。Altera CycloneとXilinx Starter Kitで動作させました。
Apr.12.2005 Veritak 1.53Aをリリースしました。
Apr.1.2005 Veritak 1.52Dをリリースしました。
Mar.30.2005 Veritak 1.52Aをリリースしました。
重要な更新ですので、ユーザの方は、漏れなくUpdateしてください。
Mar.24.2005 Veritak 1.51Eをリリースしました。
日本語チュートリアルを添付しました。
Mar.13.2005 Version 1.50A をリリースしました。
Xilinx coregenlibに対し、最適化を行いました。
Feb.21.2005 Version 1.49Aをリリースしました。
Feb.18.2005 Version 1.48Aをリリースしました。
英語版βテストバージョンです。日本語OS環境下では、なにも変わりませんが、英語OS環境下では、英語表示になります。
Feb.14.2005 Version 1.47Aをリリースしました。
Feb.5.2005 Version 1.46Aをリリースしました。
Jan.23.2005 Version 1.45Aをリリースしました。
Jan.11.2005 Version 1.44Aをリリースしました。
Verilog-2001開発Snapshot版です。Xilinx coregenlibに対応しました。Xilinxのライブラリ(xilinxcorelib,unisims,simprimes)を使われる方は、操作方法が追加になっていますので、Tutorialをご参照ください。
Dec.8.2004 Version 1.43C をリリースしました。
Dec.4.2004 Version 1.43B をリリースしました。
Dec.3.2004 Version 1.43A をリリースしました。
Dec.2.2004 Version 1.42B をリリースしました。
Nov.30.2004 Version1.42A(β版)をリリースしました。
Nov.21.2004 Version1.41A(α版)をリリースしました。
Opencoresから14種の Veritak プロジェクトファイルを追加しました。
Nov.13.2004
11月21日リリース予定のVersion1.41(α版) 速度評価レポートです。
Nov.12.2004
Z80系2種のベンチマークを追加しました。
Nov.4.2004 Version1.29Bをリリースしました。
Oct.27.2004
<Veritakユーザ様にお知らせ>
11月21日リリース(Version1.4X αリリース)よりRTLシミュレーション速度が約3倍スピードアップします。
Oct.24.2004 F.A.Q.をupdateしました。
Sep.24.2004 Version 1.29Aをリリースしました。
Sep.21.2004 Version 1.28Aをリリースしました。
Sep.19.2004 VeriPad ソースを公開しました。
Sep.16.2004 Version 1.27Aをリリースしました。
Sep.9.2004 Version 1.26Aをリリースしました。
Sep.8.2004 Version 1.25Cをリリースしました。
Sep.8.2004 Version 1.25Bをリリースしました。
Sep.8.2004 Version 1.25Aをリリースしました。
Veritak要望リストによる改善事項を実装しました。
Sep.1.2004 Version 1.24Aをリリースしました。
Veritak要望リストによる改善事項を実装しました。
Aug.25.2004 Version 1.23Aをリリースしました。
F.A.Q.sをupdateしました。
Aug.20.2004 Version 1.22Aをリリースしました。
Aug.19.2004
F.A.Q.sをupdateしました。
Aug.18.2004 Version 1.21Aをリリースしました。
Veritak要望リストによる改善事項を実装しました。操作方法が追加になっていますのでチュートリアルをご参照ください。
Aug.16.2004 Version 1.20Aをリリースしました。
Veritak要望リストによる改善事項を実装しました。操作方法が追加になっていますのでチュートリアルをご参照ください。
Aug.12.2004 Version 1.19Bをリリースしました。
Aug.11.2004 Version 1.19Aをリリースしました。
Veritak要望リストによる改善事項を実装しました。操作方法が追加になっていますのでチュートリアルをご参照ください。
Aug.10.2004 F.A.Q.をupdateしました。
Aug.6.2004 F.A.Q.をupdateしました。
Jul.30.2004 Version 1.18Aをリリースしました。
Jul.30.2004 Version 1.17Aをリリースしました。
<Veritakユーザの皆様へ>
Veritak要望をまとめました。
Jul.28.2004 Version 1.16Aをリリースしました。
Jul.27.2004 Version 1.15Bをリリースしました。
$fdisplay等で、ファイルディスクリプタが不正のときクラッシュしてしまう問題(1.14A〜)を修正しました。
Jul.26.2004 YACCプロジェクトの開発スナップショット版をUpしました。
Jul.25.2004 Version 1.15Aをリリースしました。
Altera SDFモードのバグをFixしました。
Jul.24.2004 Version 1.14Cをリリースしました。
Altera SDF(ゲートシミュレーション)モードで、バグが見つかりました。問題がFixされるまでの間、Altera SDFゲートシミュレーション(RTLシミュレーションは問題ありません。)を行う場合は、Altera SDFモードではなく、本VersionのRTLモード(Defaultモード)をお使いください。
Jul.23.2004 Version 1.14Bをリリースしました。
Viewer Entireボタンのバグを修正しました。
Jul.21.2004 Version 1.14Aをリリースしました。
$sprintf追加、Viewer改善等です。
Jul.18.2004 Version 1.13Bをリリースしました。
Viewerでビット展開した場合のバグを修正しました。
Jul.17.2004 YACCプロジェクトをUpdateしました。
デザインウェーブ付録基板で実動作させてみました。Cで電卓アプリケーションを書いてみました。
Jul.10.2004 Verstion 1.13Aをリリースしました。
コードジェネレータのバグを修正しました。
Jul.4.2004 Version1.12Dをリリースしました。
ScopeViewの信号名並びをアルファベットオーダに改善しました。
Jul.3.2004 YACCプロジェクトをUpdateしました。
FPGA駆動周波数(世界最速)160MHz、32ビットCPUのDhrystoneベンチマークシミュレーションをUpしました。
Jun.21.2004 Version1.12Cをリリースしました
VCD関係の修正を行いました。
Jun.13.2004 Version1.12Bをリリースしました
SDF RECOVERYのサポート(XILINX ゲートシミュレーション)
Jun.10.2004 Version1.12Aをリリースしました
Waveformviewer 、その他改善を行いました。
詳細は、ダウンロードのページをご参照ください
WaveformViewerの使い方については、Veritakチュートリアルをご参照ください。
Jun.9.2004
<H8互換CPU設計状況>
デバッグ終了しました。
Jun.8.2004
英語版リリースを12月に予定しています。(英語圏からのアクセスが多くなってきたので。。)
Jun.5.2004
<H8互換CPU設計状況>
GCC上でのデバッグフェーズに入りました。
Jun.2.2004
オープンコアの予告編を追加しました。
May.31.2004
<H8互換CPU設計状況>
Updateしました。
May.24.2004 Version1.11Dをリリースしました
"Veritak"を固有定義として加えました。(プリプロセッサのみ変更)
May.23.2004
H8互換CPUの設計目標仕様を変更しました。
May.22.2004 Version1.11Cをリリースしました。
Version1.10〜Viewerがクラッシュする不具合を修正しました。
May.18.2004 Version1.11Aをリリースしました。
Xilinx用SDFのサポートを開始しました。
May.15.2004 Version1.10Aをリリースしました。
Altera用SDFのサポートを開始しました。ダウンロードのページをご参照ください。
May.13.2004
MIPS(TM)のInstructionをサポートするPlasmaコアをAltera CYCLONE上にVerilogで論理合成しました。(オープンコア) ALTERA用SDF対応Veritakチュートリアル作成過程での副産物です。
May.2.2004 Altera用SDF実装状況
設計終了しました。現在リリースに向け内部テスト中です。
F.A.Q.とLinksをUpdateしました。
May.1.2004 Version 1.02Cをリリースしました。
インスタンスモジュールにNullポートがあった場合、コンパイルエラーとなる問題の修正を行いました。
Apr.27.2004
H8互換CPUの設計目標仕様をアップしました。
Apr.17.2004
Design Wave設計コンテスト2004の結果が発表になりました。
結果は惜しくも努力賞です。(設計者 菅原孝幸、設計レポート:共通鍵暗号 AES 用 SubBytes 変換回路設計(PDF))賞品は、4つの選択肢からキャノンのデジタルカメラを選択させていただきました。
<ユーザ様:リリース遅延についてのお知らせ>
Altera用のバックアノテーションのテストバージョンを4月30日に予定していましたが、5月19日に変更します。SDFそのものは、実装できたのですが、実際に読み込ませてみると予想以上にメモリを馬鹿食いすることが判明しました。このため、内部的にやや大きな設計変更を行っています。
Mar.29.2004 Version 1.02Bをリリースしました
function 宣言で構文エラーとなるVersion 1.02Aのバグを修正しました。
VCDファイルの時間データのバグ修正を行いました。
Mar.27.2004 Version 1.02Aをリリースしました。
メインは、Real系の変数、演算のサポートです。詳しくは、ダウンロードのページの改版更新履歴をご参照ください。
- Verilog言語チュートリアル(Verilog文法マニュアルBNF付き)を追加しました。(まだ中途です。)
- VPIによる算術演算Cライブラリを追加しました。
- VPIによる線形アナログシミュレータを追加しました。
Mar.8.2004 Version 1.01Bをリリースしました。
Mar.5.2004 Version 1.01をリリースしました。
菅原システムズ(www.sugawara-systems.com)のIPコアは、Veritakシミュレータで開発されています。
当サイトはリンクフリーです。