Verilog偱CPU愝寁擖栧
僩儔媄偺晅榐婎斅(2006擭4寧崋乯偱丄CPU傪嶌偭偰傒傑偟傚偆丅偲偙傠偱丄偙偺僨僶僀僗ALTERA丂MAX嘦丄俤俹俵240俿100俠俆偼丄240僙儖偟偐側偄偺偱丄惓峌朄偱偼丄偳偆偑傫偽偭偰傕嵹傝傑偣傫丅僼儔僢僔儏傕嵹偭偰偄傞偺偱偡偑丄偙傟傪ROM偵偟偰偟傑偆偲丄偐側傝抶偔側傞偟丄巊偄曽偑擄偟偄偱偡丅偙偺僙儖悢偼丄忢幆揑偵偼丄悢屄偺僇僂儞僞偱杽傑偭偰偟傑偄傑偡丅偦偙偱丄師偺傛偆側曽恓偱愝寁偟傑偟偨丅
- 1擔偱愝寁偱偒傞娙扨側傾乕僉僥僋僠儍(僴乕僪僜乕僗偼300峴埲壓乯
- RISC傾乕僉僥僋僠儍傪恀帡偡傞
- 幚梡惈傕峫椂偟丄16價僢僩墘嶼丄32價僢僩僀儞僗僩儔僋僔儑儞/儚乕僪
- 僷僞乕儞僕僃僱儗乕僞偲偟偰幚梡偵懴偊傞
- 擖栧梡偲偟偰丄CPU傾乕僉僥僋僠儍傪梕堈偵棟夝偱偒傞傛偆丄VPI偱價僕儏傾儖側摦嶌娐嫬傪採嫙
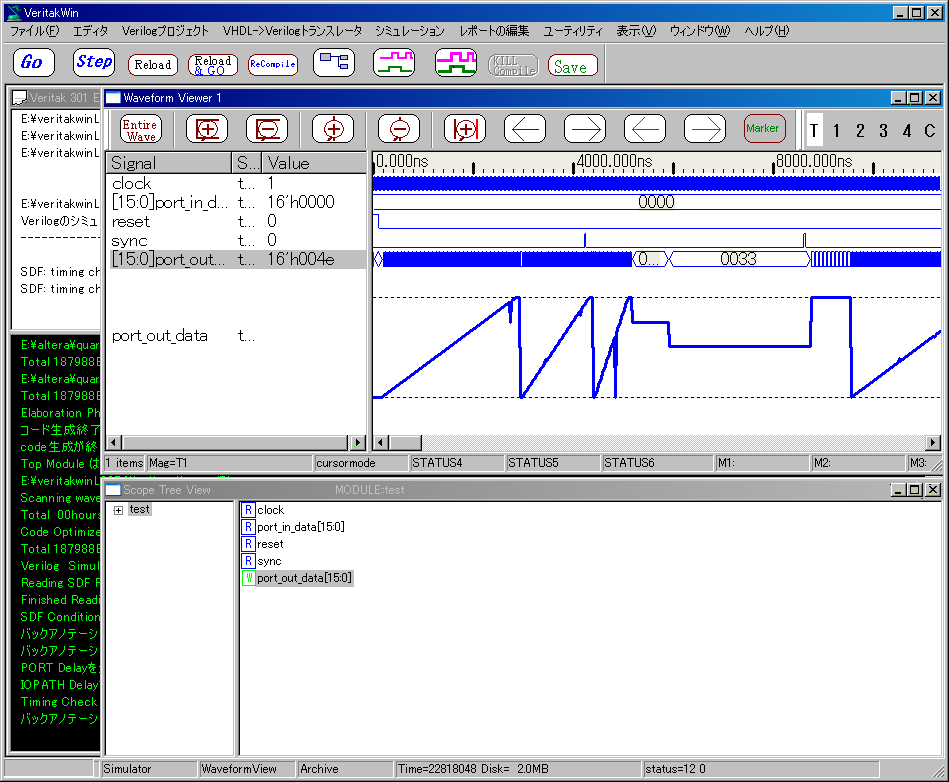
偲偄偆曽恓偱愝寁偟傑偟偨丅僼儔僢僔儏傪巊梡偟偰偄傑偣傫偺偱丄僩儔媄僨僶僀僗偱偼丄16儚乕僪埵偟偐嵹傝傑偣傫丅偦傟偱傕丄椺偊偽丄師偺傛偆側僷僞乕儞傪敪惗偝偣傞偙偲偑偱偒傑偡丅乮傑偨丄ROM梕検偑嫋偣偽丄俇係KWORD傑偱奼挘壜擻側傾乕僉僥僋僠儍偵側偭偰偄傑偡丅乯

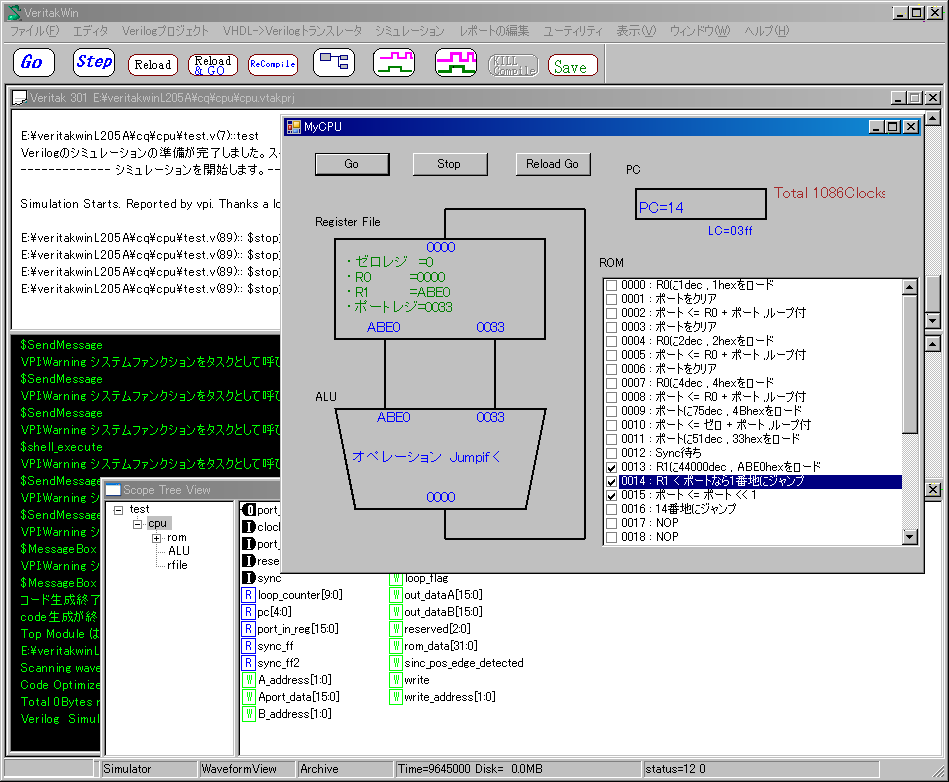
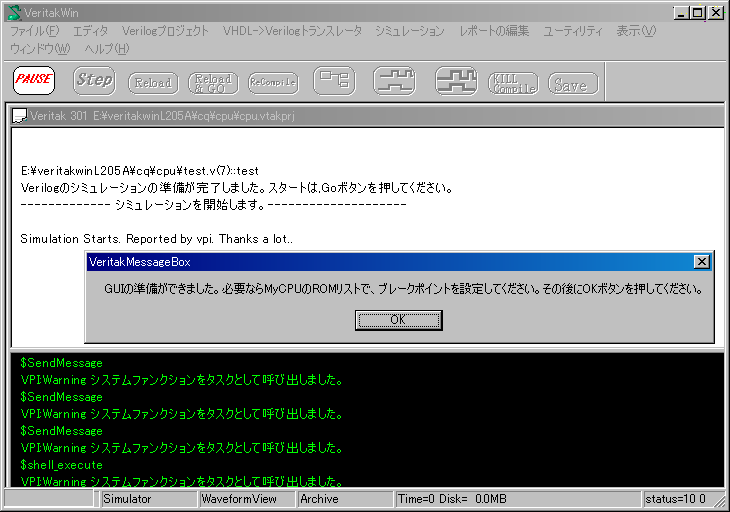
傑偨丄價僕儏傾儖偵撪晹偺忬懺傪僽儗乕僋億僀儞僩晅偱妋擣偡傞偙偲偑弌棃傑偡丅乮椺偵傛偭偰GUI偼丄C#偱嶌惉偟偰偄傑偡丅乯
偙傟偵傛傝丄梕堈偵CPU偺拞恎偺摦偒傪抦傞偙偲偑偱偒傑偡丅
MAX2偵儗僀傾僂僩屻偺抶墑僔儈儏儗乕僔儑儞偱傕摦嶌妋擣偟偰偄傑偡丅乮僸僎偼丄抶墑偑堦掕偟偰偄側偄偨傔偱偡丅乯
亙CPU偲偼丄弴彉婡夿亜
堦斣扨弮側弴彉婡夿偲偄偊偽丄僇僂儞僞偱偡丅僇僂儞僞偼丄弴斣傪惗惉偟傑偡偺偱丄偦傟偵ROM傪偮偗傟偽丄僐儞僩儘乕儖晅偒偺弴彉婡夿偵側傝傑偡丅
壓恾偱丄僇僂儞僞傪PC亖僾儘僌儔儉僇僂儞僞偲尵偆偲奿岲傛偔側傝傑偡丅偝偰愝寁偟偨CPU偼丄32價僢僩暆偑偁傞偺偱丄ROM偺暆偼32價僢僩偵側傝傑偡丅
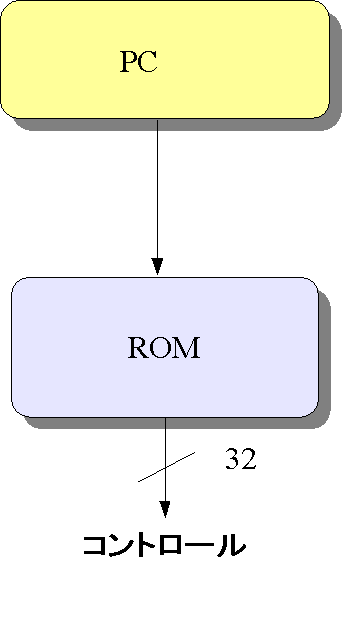
偦偺傑傑偱偼丄側偵偐傪敾抐偟偰張棟傪曄偊傞偲偄偆偙偲偑偱偒側偄偺偱丄PC傪側傫傜偐偺宍偱惂屼偡傞昁梫偑偁傝傑偡丅傑偨丄偦偺堊偵偼丄堦帪揑側婰壇慺巕偑昁梫偱
偡丅婰壇慺巕傪儗僕僗僞偺廤傑傝偲偟偰傑偲傔偨傕偺傪儗僕僗僞僼傽僀儖偲尵偄傑偡丅忋偺儗僕僗僞僼傽僀儖偼丄摨帪偵撉傒彂偒偱偒傞億乕僩偑俁偮偁傝傑偡丅儔僀僩億乕僩偑堦偮丄儕乕僪億乕僩偑擇偮偱偡丅傑偨丄儗僕僗僞悢偼丄16價僢僩偑4屄偱偡丅
堦斣栚偺僛儘儗僕僗僞偼丄RISC偱偼丄掕斣偱偡丅嵟屻偺億乕僩儗僕僗僞偼丄偙偺CPU偩偗偺摿庩巇條偱偡丅乮儕僜乕僗嶍尭偺偨傔乯
| 柤徧 | 婡擻 |
| 僛儘 | Write偟偰傕Read偟偰傕侽丄側偺偱幚懱偼丄偨偩偺GND |
| R0 | 斈梡儗僕僗僞 |
| R1 | 斈梡儗僕僗僞 |
| 億乕僩 | 摿庩儗僕僗僞丄偦偺傑傑丄奜晹億乕僩弌椡偵側傞 |
HDL僜乕僗偱尒偰傕傜偭偨傎偆偑暘偐傝傗偡偄偐傕偟傟傑偣傫丅
module register_file(input clock,write,reset,
input [1:0] A_address,
input [1:0] B_address,
input [1:0] write_address,
input [15:0] alu_data,port_in_data,
output [15:0] out_dataA, out_dataB,port_out_data);
reg [15:0] port_reg,r0,r1;
always @(posedge clock,posedge reset) begin
if (reset) begin
port_reg<=0;
r0<=0;
r1<=0;
end else if (write) begin
case (write_address)
`PORT: port_reg<=alu_data;
`R0: r0<=alu_data;
`R1: r1<=alu_data;
//default r0<=alu_data;
endcase
end
end
assign out_dataA=A_address==`PORT ? port_in_data :
A_address==`R0 ? r0 :
A_address==`R1 ? r1 : 0;
assign out_dataB=B_address==`PORT ? port_reg :
B_address==`R0 ? r0 :
B_address==`R1 ? r1 : 0;
assign port_out_data=port_reg;
endmodule
偝偰丄儗僕僗僞僼傽僀儖偺屻抜偼丄ALU偱偡丅杮奿揑側ALU傪幚憰偟偰偄傑偡丅
module alu (input [3:0] command,
input [2:0] jump_cond,
input [15:0] portA,portB,
output reg [15:0] alu_out);
always @* begin
case (command)
`ADD_com : alu_out=portA+portB;
`SUB_com : alu_out=portA-portB;
`SHIFT_L_com: alu_out=portB >>1;
`SHIFT_R_com: alu_out=portB <<1;
`JMP_com :
case (jump_cond)
`Eq : alu_out=portA==portB;
`Not_Eq:alu_out=portA !=portB;
`Always : alu_out=1;
`Always_Not :alu_out=0;
`LT : if (portA < portB) alu_out=1;
else alu_out=0;
`GT : if (portA > portB) alu_out=1;
else alu_out=0;
default: alu_out=0;
endcase
default: alu_out=portA+portB;
endcase
end
endmodule
屻偼丄PC偺僐儞僩儘乕儖偱偡丅偙傟偼丄屻弎偡傞僷僞乕儞僕僃僱儗乕僞偲偟偰偺婡擻偑擖偭偰偄傞偨傔偵丄偪傚偭偲偩偗暋嶨偱偡偑丄偨偄偟偨偙偲偼偁傝傑偣傫丅
幬傔帤傪柍帇偟偰撉傓偲丄JUMP僐儅儞僪偺偲偒丄ALU弌椡偺價僢僩侽偑1偩偭偨傜丄immediate
data 偺斣抧傪儘乕僪丄偦傟埲奜偼丄pc<=pc+1 ;偮傑傝丄偨偩偺僇僂儞僞偲偄偆偙偲偱偡丅
偙偺immediate_data 偼丄32價僢僩暆偺ROM偺壓埵16價僢僩偵妱傝摉偰偰偄傑偡丅偱偡偐傜丄ROM偺梕検偝偊嫋偣偽丄俇係KWORD傑偱丄偳偙偵偱傕旘偽偡偙偲偑偱偒傑偡丅
//control of PC
always @(posedge clock, posedge reset) begin
if (reset) pc<=0;
else if (command==`JMP_com && alu_data[0]==1'b1) pc<=immediate_data;//Jump if jump condition is met.
else if (command==`SYNC_com) begin//Sync Start Condition
if (sinc_pos_edge_detected) pc<=pc+1;//Exectute Next Address!
else pc<=pc;//Hold until sync pulse is detected.
end else if (loop_flag ) begin//Loop Condition
if (loop_counter==0) pc<=pc+1;//Execute Next Address!
else pc<=pc;//Hold until loop counter becomes zero.
end else pc<=pc+1;//else increment PC
end
婎杮揑偵偼丄埲忋偺梫慺傪偮側偘傟偽丄CPU偵側傝傑偡丅偡偛偔娙扨偱偡偹丅栜榑侾CLK偱丄侾INSTRUCTION張棟偱MUX俀僨僶僀僗偱傕俁侽MH倸埲忋偱摦嶌壜擻偱偡丅
偝偰丄ROM弌椡偼丄32價僢僩偺撪16價僢僩傪旘傃愭偵巊偄傑偟偨丅
巆傝偺僼傿乕儖僪傪娷傓妱晅偼師偺傛偆偵側偭偰偄傑偡丅
| 價僢僩埵抲 | 價僢僩暆 | 柤徧 | 撪梕 |
| 31:28 | 4 | command | 僐儅儞僪 |
| 27:26 | 2 | A_address | 儗僕僗僞僼傽僀儖A億乕僩偺傾僪儗僗 |
| 25:24 | 2 | B_address | 儗僕僗僞僼傽僀儖B億乕僩偺傾僪儗僗 |
| 23:22 | 2 | write_address | 儗僕僗僞僼傽僀儖儔僀僩億乕僩偺傾僪儗僗 |
| 21:19 | 3 | jump_cond | 僕儍儞僾忦審 |
| 18:16 | 3 | reserved | |
| 16:16 | 1 | loop_flag | 儖乕僾張棟偡傞偐偳偆偐偺僼儔僌丄侾偱儖乕僾張棟 |
| 15:0 | 16 | immediate | 懄抣傑偨偼丄旘傃愭 |
柦椷偺撪梕傪夝搥偡傞僨僐乕僪偲偄偆張棟偼偁傝傑偣傫丅偱偡偺偱丄32價僢僩偲偄偆峀偄價僢僩暆偑梫傞偺偱偡偑丄偦偺暘娙扨偵愝寁偱偒傑偡丅
偙偺傛偆偵ROM偺弌椡傪惂屼慄偵巊偆傗傝曽傪儅僀僋儘僐乕僪曽幃偲屇傃傑偡丅偙偺CPU偼丄儅僀僋儘僐乕僪帺懱偑丄婡夿岅柦椷偵側偭偰偄傑偡丅
偙偺CPU偑Native偱丄傕偭偰偄傞柦椷偼丄師偱偡丅
`define ADD_com 4'b0000 `define LOAD_IM_com 4'b0001 `define SUB_com 4'b0010 `define SHIFT_L_com 4'b0011 `define SHIFT_R_com 4'b0100 `define JMP_com 4'b0101 `define SYNC_com 4'b0110
傛偔傾僙儞僽儔偱尒偐偗傞MOV柦椷偑偁傝傑偣傫丅偙傟偼丄RISC偺掕斣偱偁傞丄僛儘儗僕僗僞偲偺壛嶼偱幚尰偟偰偄傑偡丅
僜乕僗偱偼丄儅僋儘掕媊偱丄價僢僩僼傿乕儖僪傪32價僢僩偺ROM僐乕僪偵曄姺偟偰偄傑偡丅
`define MOV( r0, r1) {Add,r0,ZR, r1,Eq,Reserved,Zero_Im}
忋偺僐乕僪偺堄枴偼丄
丂丂丂r1 <=r0 +0
偵側傝傑偡丅
摨條偵丄儅僋儘偱柦椷傪掕媊偡傞偙偲偑偱偒傑偡丅傾僙儞僽儔偱傛偔尒偐偗傞NOP偼丄偳偆幚憰偟偨傜傛偄偱偟傚偆偐丠幚偼丄ALL丂侽偼丄NOP偵偟偰偄傑偡丅
偦偺堄枴偼丄
丂丂僛儘儗僕僗僞亙亖僛儘儗僕僗僞亄僛儘儗僕僗僞
偱偡丅
parameter [1:0] Port=`PORT,//IO PORT
R0= `R0,
R1= `R1,
ZR= `ZR;//ZERO REGISTER
parameter [15:0] Zero_Im=16'h0000;
parameter [3:0] Load_Im=`LOAD_IM_com,
Add=`ADD_com,
Sub=`SUB_com,
Shift_L=`SHIFT_L_com,
Shift_R=`SHIFT_R_com,
Jmp=`JMP_com,
Sync=`SYNC_com;
parameter [2:0] Eq=`Eq,
Not_Eq=`Not_Eq,
Always=`Always,
Always_Not=`Always_Not,
LT=`LT,
GT=`GT,
LTE=`LTE,
GTE=`GTE;
parameter [2:0] Reserved=3'b000,
Loop_Enabled=3'b001;
`define MOV( r0, r1) {Add,r0,ZR, r1,Eq,Reserved,Zero_Im}
`define CLR( r0) { Add,ZR,ZR,r0,Eq,Reserved,Zero_Im}
`define JUMP(num) {Jmp,ZR,ZR,ZR,Always,Reserved,16'd num}
`define LOAD_IM(r0,num) {Load_Im,Port,ZR,r0,Eq,Reserved,16'd num}
`define ADD(r0,r1,r2) { Add,r0,r1,r2,Eq,Reserved,Zero_Im}
`define SUB(r0,r1,r2) { Sub,r0,r1,r2,Eq,Reserved,Zero_Im}
`define JUMP_IF_LESS_THAN(r0,r1,num) {Jmp,r0,r1,ZR,LT,Reserved,16'd num}
`define JUMP_IF_GREATER_THAN(r0,r1,num) {Jmp,r0,r1,ZR,GT,Reserved,16'd num}
`define JUMP_IF_EQ(r0,r1,num) {Jmp,r0,r1,ZR,Eq,Reserved,16'd num}
`define SHIFT_L(r0,r1) {Shift_L,ZR,r0,r1,Eq,Reserved,Zero_Im}
`define SHIFT_R(r0,r1) {Shift_R,ZR,r0,r1,Eq,Reserved,Zero_Im}
`define SYNC {Sync,ZR,ZR,ZR,Eq,Reserved,Zero_Im}
偙偙傑偱丄撉傫偱偔傟偰偁傝偑偲偆偛偞偄傑偡丅偦偆偱偡丅傾僙儞僽儔偼側偄偺偱偡丅
ROM僐乕僪偼丄椺偊偽丄忋偱掕媊偟偨儅僋儘傪巊偭偰師偺傛偆偵彂偒傑偡丅
偙傟偧丄媶嬌偺乽僐儞僺儏乕僞偺尨棟傪妛傇乿丂偐傕偟傟傑偣傫丅丂偙偆偄偆柦椷偑梸偟偄偲偄偆偺偑偁偭偨傜丄忋偱儅僋儘掕媊偟偰偟傑偊偽丄傛偄栿偱偡丅
儅僋儘揥奐偼丄Veritak僆僾僔儑儞偱丄preout.v丂偲偟偰尒傟傑偡偺偱丄巚偄捠傝偵揥奐偝傟偰偄傞偐僠僃僢僋偟偰傒偰傕傛偄偱偟傚偆丅
function [31:0]romdata;
input [4:0] address;
case (address) //Commad A_addr, B_addr, Write_addr, Jmp_cond,Reserved, IM
0: romdata =`LOAD_IM(R0,1);
1: romdata =`CLR(Port);
2: romdata =`Add_with_loop(Port,R0,100);
3: romdata =`CLR(Port);
4: romdata =`LOAD_IM(R0,2);
5 : romdata =`Add_with_loop(Port,R0,50);
6: romdata =`CLR(Port);
7: romdata =`LOAD_IM(R0,4);
8 : romdata =`Add_with_loop(Port,R0,25);
9 : romdata =`LOAD_IM(Port,75);
10: romdata =`Add_with_loop(Port,ZR,25);
11: romdata =`LOAD_IM(Port,51);
12: romdata =`SYNC;
13: romdata =`LOAD_IM(R1,44000);
14: romdata =`JUMP_IF_LESS_THAN(R1,Port,1);
15 : romdata =`SHIFT_R(Port,Port);
16: romdata =`JUMP(14);
// 3 : romdata =`LOAD_IM(R0,100);
// 4 : romdata =`LOAD_IM(R1, 62444);
// 5 : romdata =`ADD(R0,R1,Port);
// 6 : romdata =`LOAD_IM(Port,10000);
// 7 : romdata =`ADD(R0,R1,R0);
// 8 : romdata =`SUB(R0,R1,R0);
// 9 : romdata =`ADD(Port,R0,R0);
// 10 : romdata =`JUMP_IF_LESS_THAN(R0,R1,0);
// 11 : romdata =`JUMP_IF_EQ(R0,R1,3);
17 : romdata =0;
18 : romdata =0;
19 : romdata =0;
20 : romdata =0;
default : romdata=0;
endcase
endfunction
亙Confiugurable CPU亜
偙偺CPU偱丄愝寁偟偰偄偰柺敀偄偙偲偵婥偯偒傑偟偨丅偦傟偼丄偙偺CPU偼丄ROM儚乕僪偄偔偮傑偱MAX2偵嵹傞偲偼丄尵偊側偄偙偲偱偡丅幚嵺偵ROM偱巊偆柦椷偵傛傝傑偡丅ROM傪儊儌儕偲偟偰偱偼側偔丄LUT偱峔惉偟偰偄傞偺偱丄幚憰偡傞柦椷偱塭嬁傪庴偗傑偡丅偮傑傝丄ALU偱偼丄偄傠偄傠掕媊偟偰偁傞偺偱偡偑丄榑棟崌惉偱丄巊傢側偄儘僕僢僋偼丄梕幫側偔Rudction偝傟傑偡丅儅僕僢僋偺庬柧偐偟偱偟偨丅
亙僷僀僾儔僀儞壔偲偄偆偙偲亜
偙偺CPU偼丄挿偄僷僗傪帩偭偰偄傑偡丅懡暘丄PC偵巒傑傝ROM丂->Register丂FILE丂亅亜ALU亅亜丂PC丂僐儞僩儘乕儖儘僕僢僋乕亜PC偵棃傞僷僗偑嵟挿偩傠偆偲巚偄傑偡丅
嵟挿偺僷僗傪僋儕僥傿僇儖僷僗偲尵偄傑偡丅僷僀僾儔僀儞壔偟偨晛捠偺CPU偱偼丄偙偺僷僗偼壗抜偐偺FF娫偺慻傒崌傢偣夞楬偵暘妱偝傟傞偙偲偵側傝傑偡丅丂
CPU偺墳梡
亙僷僞乕儞Generator亜
儖乕僾僼儔僌傪ON偵偡傞偲丄儖乕僾僇僂儞僞偑0偵側傞傑偱丄偦偺応強偵棷傑傝丄柦椷傪孞傝曉偟傑偡丅偙傟偼丄Shift墘嶼偵傕妶梡偡傞偙偲偑偱偒傑偡丅
//loop command
`define Shift_Right_with_Loop(r0,num) {Shift_R,ZR,r0,r0,Eq,Loop_Enabled,16'd num }
`define Add_with_loop(r0,r1,num) { Add,r1,r0,r0,Eq,Loop_Enabled,16'd num} //Use Bport for port_reg
儖乕僾僇僂儞僞偼丄懄抣偲寭梡偱偡偺偱丄慡柦椷偱揔梡偱偒傞栿偱偼丄偁傝傑偣傫丅偟偐偟丄擟堄帪娫暆偺僷僞乕儞傪嶌傞応崌偵偼丄偙偺惈幙偼丄廳曮偟傑偡丅 傑偨丄SYNC柦椷偱丄POS丂EDGE偱柦椷僗僞乕僩偲偄偆偙偲傕偱偒傑偡丅BINARY偺僔儕傾儖僷僞乕儞傪嶌傞応崌偼丄16價僢僩偛偲偵丄CPU傊CLCOCK傪梌偊傟偽丄僔儕傾儖僷僞乕儞惗惉婍偵傕側傝傑偡丅 亙VPI亜 崱夞傕丂vpi_dll5.dll 偵捛壛偟傑偟偨丅$SendMessage偲丄$MessageBox 傪捛壛偟傑偟偨丅偦偺柤偺捠傝偱偡偑丄徻嵶偼僜乕僗傪嶲徠偔偩偝偄丅 崱夞捛壛偟偨僜乕僗偼師偱偡丅
搊榐晹
//Jul.11.2006
tf_data.type =vpiSysFunc;//
tf_data.sysfunctype =vpiIntFunc;//
tf_data.tfname = "$SendMessage";
tf_data.user_data = "$SendMessage";
tf_data.calltf = sys_SendMessage;
tf_data.compiletf = 0;
tf_data.sizetf = sys_systems_size_tf;//func
vpi_register_systf(&tf_data);
tf_data.type =vpiSysFunc;//
tf_data.sysfunctype =vpiIntFunc;//
tf_data.tfname = "$MessageBox";
tf_data.user_data = "$MessageBox";
tf_data.calltf = sys_MessageBox;
tf_data.compiletf = 0;
tf_data.sizetf = sys_systems_size_tf;//func
vpi_register_systf(&tf_data);
幚憰晹
static int sys_SendMessage(char* name)
{
vpiHandle systfref, argsiter, argh;
s_vpi_value value;
systfref = vpi_handle(vpiSysTfCall, NULL); /* get system function that invoked C routine */
argsiter = vpi_iterate(vpiArgument, systfref);/* get iterator (list) of passed arguments */
unsigned message_parameter[4];
for (unsigned i=0;i<4;i++){
argh = vpi_scan(argsiter);/* get the one argument - add loop for more args */
if(!argh){
vpi_printf("$VPI sys_SendMessage: missing parameter. \n");
// vpi_sim_control(vpiFinish, 1);
return 0;
}
value.format = vpiIntVal;
vpi_get_value(argh, &value);
message_parameter[i]=value.value.integer;
}
unsigned result= ::SendMessage(reinterpret_cast<HWND>(message_parameter[0]),//handle
message_parameter[1],//WM_COMMAND
message_parameter[2],//WPARAM
message_parameter[3]);//LPARAM
if(argh) vpi_free_object(argsiter);
value.value.integer =result;//;
value.format = vpiIntVal;/* return the result */
vpi_put_value(systfref, &value, NULL, vpiNoDelay);
return(0);
}
static int sys_MessageBox(char* name)
{
vpiHandle systfref, argsiter, argh;
s_vpi_value value;
systfref = vpi_handle(vpiSysTfCall, NULL); /* get system function that invoked C routine */
argsiter = vpi_iterate(vpiArgument, systfref);/* get iterator (list) of passed arguments */
unsigned message_id=0;
string str_message;
string str_caption;
for (unsigned i=0;i<2;i++){
argh = vpi_scan(argsiter);/* get the one argument - add loop for more args */
if(!argh){
vpi_printf("$VPI sys_MessageBox: missing parameter. \n");
// vpi_sim_control(vpiFinish, 1);
return 0;
}
value.format = vpiStringVal;
vpi_get_value(argh, &value);
if (i==0) str_message=value.value.str;
else if (i==1) str_caption=value.value.str;
}
argh = vpi_scan(argsiter);
if (argh) {
value.format = vpiIntVal;
vpi_get_value(argh, &value);
message_id=value.value.integer;
}
unsigned result=MessageBox(0,str_message.c_str(),
str_caption.c_str(),message_id);
if(argh) vpi_free_object(argsiter);
value.value.integer =result;//;
value.format = vpiIntVal;/* return the result */
vpi_put_value(systfref, &value, NULL, vpiNoDelay);
return(0);
}
僥僗僩儀儞僠偺僜乕僗偱偡丅
Verilog丂HDL僜乕僗偐傜丄MessageBox傪奐偔偙偲偑偱偒傑偡丅
`timescale 1ns/1ps
`ifdef GATE_SIM
`define CYCLE 26.92
`else
`define CYCLE 30
`endif
module test;
reg clock=0;
reg reset=0;
reg [15:0] port_in_data=0;
reg sync=0;
wire [15:0] port_out_data;
always #(`CYCLE/2) clock=~clock;
initial begin
reset=1;
#105;
reset=0;
#1000000;
$finish;
end
cpu cpu(.clock,.reset,.sync,.port_in_data,.port_out_data);
always @(negedge clock) begin
if (port_out_data==51) begin
repeat( 100) begin
@(negedge clock);
end
sync=1;
@(negedge clock);
sync=0;
end
end
localparam integer MB_YESNO=4;
localparam integer MB_YES=6;
localparam integer MB_NO=7;
localparam integer TOP_MOST=32'h4_0000;
`ifndef GATE_SIM
integer handle,i;
reg [8*20:1] str;
reg [31:0] data;
integer result;
parameter integer WM_COMMAND=32'h111;
initial begin
handle=$FindWindow("MyCPU");
if (handle) begin
end else begin :loop0
result=$MessageBox("傛偆偙偦丅Visual 僨僶僢僈傪婲摦偟傑偡偐丠","VeritakMessageBox",MB_YESNO | TOP_MOST );
if (result==MB_YES) begin
$shell_execute("cpu");
repeat(100) begin//Retry丂LOOP丟丂Repeat until MyCPU is detected.
$Sleep(100);//100ms wait
handle=$FindWindow("MyCPU");
if (handle) disable loop0;
end
end
end
if (handle) begin
$SendMessage(handle,WM_COMMAND,256,0);//ROM 僐乕僪傪憲弌
for (i=0;i<32;i=i+1) begin
data=cpu.rom.romdata(i);
$SendMessage(handle,WM_COMMAND,i+256,data);
end
$MessageBox("GUI偺弨旛偑偱偒傑偟偨丅昁梫側傜MyCPU偺ROM儕僗僩偱丄僽儗乕僋億僀儞僩傪愝掕偟偰偔偩偝偄丅偦偺屻偵OK儃僞儞傪墴偟偰偔偩偝偄丅","VeritakMessageBox");
end else begin
//$MessageBox("MyCPU偑婲摦偱偒傑偣傫偱偟偨丅","VeritakMessageBox");
end
end
always @(negedge clock) begin
handle=$FindWindow("MyCPU");
if (handle) begin//尰嵼偺忬懺傪憲弌
//regfile
$SendMessage(handle,WM_COMMAND,1,cpu.rfile.out_dataA);
$SendMessage(handle,WM_COMMAND,2,cpu.rfile.out_dataB);
$SendMessage(handle,WM_COMMAND,3,cpu.rfile.alu_data);
$SendMessage(handle,WM_COMMAND,4,cpu.rfile.r0);
$SendMessage(handle,WM_COMMAND,5,cpu.rfile.r1);
$SendMessage(handle,WM_COMMAND,6,cpu.rfile.port_reg);
$SendMessage(handle,WM_COMMAND,7,cpu.ALU.portA);
$SendMessage(handle,WM_COMMAND,8,cpu.ALU.portB);
$SendMessage(handle,WM_COMMAND,9,cpu.ALU.alu_out);
$SendMessage(handle,WM_COMMAND,10,cpu.ALU.command);
$SendMessage(handle,WM_COMMAND,11,cpu.ALU.jump_cond);
$SendMessage(handle,WM_COMMAND,12,cpu.loop_counter);
//PC 僐儅儞僪偼儔僗僩偵憲傞
result=$SendMessage(handle,WM_COMMAND,0,cpu.pc);
if (result==-1) begin//僽儗乕僋梫媮偑GUI偐傜棃偨傜
$stop;
end
end
end
`endif
integer handle_7led;
initial begin
handle_7led=$FindWindow("7LED");//傪扵偡
if (!handle_7led)begin :loop1
result=$MessageBox("億乕僩弌椡傪7僙僌儊儞僩LED僷僱儖偵弌椡偟傑偡偐丠","VeritakMessageBox",MB_YESNO | TOP_MOST );
if (result==MB_YES) begin
$shell_execute("LED7SEG");//7僙僌儊儞僩LED傪棫偪忋偘傞
repeat(100) begin//嵟挿100ms倶侾侽侽=10sec懸偪
$Sleep(100);
handle_7led=$FindWindow("7LED");//傪扵偡
if (handle_7led) disable loop1;//尒偮偐偭偨傜扙弌
end
end
end
end
always @(negedge clock) begin
handle_7led=$FindWindow("7LED");
if (handle_7led) begin :LED//尰嵼偺忬懺傪憲弌
reg [31:0] led_value={1'b0,decoder(port_out_data[15:12]),
1'b0,decoder(port_out_data[11:8]),
1'b0,decoder(port_out_data[7:4]),
1'b0,decoder(port_out_data[3:0])};
$SendMessage(handle_7led,WM_COMMAND,led_value,0);
end
end
function [6:0] decoder(input [3:0] din);//7segment LED
case (din)
4'b0000 : decoder = 7'b1111110;
4'b0001 : decoder = 7'b0110000;
4'b0010 : decoder = 7'b1101101;
4'b0011 : decoder = 7'b1111001;
4'b0100 : decoder = 7'b0110011;
4'b0101 : decoder = 7'b1011011;
4'b0110 : decoder = 7'b1011111;
4'b0111 : decoder = 7'b1110000;
4'b1000 : decoder = 7'b1111111;
4'b1001 : decoder = 7'b1111011;
4'b1010 : decoder = 7'b1110111;
4'b1011 : decoder = 7'b0011111;
4'b1100 : decoder = 7'b1001110;
4'b1101 : decoder = 7'b0111101;
4'b1110 : decoder = 7'b1001111;
4'b1111 : decoder = 7'b1000111;
endcase
endfunction
endmodule
C#僜乕僗偱偡丅
using System;
using System.Collections.Generic;
using System.ComponentModel;
using System.Data;
using System.Drawing;
using System.Text;
using System.Windows.Forms;
using System.Collections;
using System.Runtime.InteropServices;
namespace cpu
{
public partial class Form1 : Form
{
public Form1()
{
InitializeComponent();
command_array = new int[10000];
}
[DllImport("USER32.DLL")]
public static extern int FindWindow(
int hWnd, String lpText );
[DllImport("USER32.DLL")]
public static extern void PostMessage(
int hWnd, int com,int wp,int lp);
int wp = 0;
int lp = 0;
int[] command_array;
int a_port_address=0;
int b_port_address=0;
int write_port_address=0;
int current_pc=0;
uint clock = 0;
uint regfile_R0 = 0;
uint regfile_PORT = 0;
uint regfile_R1 = 0;
uint regfile_a_port=0;
uint regfile_b_port=0;
uint regfile_write_port=0;
uint alu_port_a=0;
uint alu_port_b=0;
uint alu_out_port=0;
uint loop_counter=0xffffffff;
uint alu_operation = 0;
uint alu_jump_cond = 0;
string get_register_name(int num)
{
switch (num)
{
case (0): return "僛儘";
case (1): return "R0";
case (2): return "R1";
case (3): return "億乕僩";
}
return "";
}
private void make_code()
{
int command = (lp >> 28 ) & 0xf;
int address = wp - 256;
if (address == 0)
{
checkedListBox1.Items.Clear();
clock = 0;
command_array.Initialize();
}
if(address>=0) command_array[address] = lp;
int a_port_address=(lp >>26) & 3 ;
int b_port_address = (lp >> 24) & 3;
int write_port_address=(lp>>22) & 3;
int jump_cond = (lp >> 19) & 7;
int loop_flag = (lp >> 16) & 1;
uint immediate =(uint)( lp & 0xffff);
string str;
str =address.ToString("d4");
str +=" : ";
if (lp == 0)
{
str +="NOP";
checkedListBox1.Items.Add(str);
}
else if (command == 0)//Add
{
if (a_port_address == 0 && b_port_address == 0)//CLR
{
string str_word = str+get_register_name(write_port_address);
str_word += "傪僋儕傾";
checkedListBox1.Items.Add(str_word);
}else if (b_port_address == 0)//MOV
{
string str_word = str+get_register_name(a_port_address);
str_word += "偐傜";
str_word += get_register_name(write_port_address);
str_word += "傊偺僐僺乕";
checkedListBox1.Items.Add(str_word);
}
else
{//Add
string str_word =str+ get_register_name(write_port_address);
str_word += " <= ";
str_word += get_register_name(a_port_address);
str_word += " + ";
str_word += get_register_name(b_port_address);
if (loop_flag == 1) str_word += " ,儖乕僾晅";
checkedListBox1.Items.Add(str_word);
}
}
else if (command == 1)//load IM
{
string str_word = str + get_register_name(write_port_address);
str_word += "偵";
str_word += immediate.ToString("d");
str_word += "dec , ";
str_word += immediate.ToString("X");
str_word += "hex傪儘乕僪";
checkedListBox1.Items.Add(str_word);
}
else if (command == 2)//SUB
{
string str_word = str + get_register_name(write_port_address);
str_word += " <= ";
str_word += get_register_name(a_port_address);
str_word += " - ";
str_word += get_register_name(b_port_address);
checkedListBox1.Items.Add(str_word);
}
else if (command == 3)//
{
string str_word = str + get_register_name(write_port_address);
str_word += " <= ";
str_word += get_register_name(b_port_address);
str_word += " >> 1 ";
if (loop_flag == 1) str_word += " ,儖乕僾晅";
checkedListBox1.Items.Add(str_word);
}
else if (command == 4)//
{
string str_word = str + get_register_name(write_port_address);
str_word += " <= ";
str_word += get_register_name(b_port_address);
str_word += " << 1 ";
if (loop_flag == 1) str_word += " ,儖乕僾晅";
checkedListBox1.Items.Add(str_word);
}
else if (command == 5)//JUMP
{
string str_word = str ;
if (jump_cond==2) {//always
str_word += immediate.ToString("d");
str_word += "斣抧偵僕儍儞僾";
checkedListBox1.Items.Add(str_word);
}else if (jump_cond==3) {//not always
str +="NOP";
checkedListBox1.Items.Add(str);
}else {
str_word += get_register_name(a_port_address);
if (jump_cond == 0) str_word += " = ";
else if (jump_cond == 1) str_word += " != ";
else if (jump_cond == 4) str_word += " < ";
else if (jump_cond == 5) str_word += " > ";
else if (jump_cond == 6) str_word += " <= ";
else if (jump_cond == 7) str_word += " >= ";
str_word += get_register_name(b_port_address);
str_word += "側傜";
str_word += immediate.ToString("d");
str_word += "斣抧偵僕儍儞僾";
checkedListBox1.Items.Add(str_word);
}
}
else if (command == 6)//Sync
{
string str_word = str ;
str_word += "Sync懸偪";
checkedListBox1.Items.Add(str_word);
}
}
private void draw_values()
{
int address = wp - 256;
if (address >= 0) make_code();
else
{
switch (wp) {
case (0) :current_pc=lp;break;
case (1): regfile_a_port =(uint) lp; break;
case (2): regfile_b_port =(uint) lp; break;
case (3): regfile_write_port =(uint) lp; break;
case (7): alu_port_a = (uint)lp; break;
case (8): alu_port_b = (uint)lp; break;
case (9): alu_out_port = (uint)lp; break;
case (4): regfile_R0 = (uint)lp; break;
case (5): regfile_R1 = (uint)lp; break;
case (6): regfile_PORT = (uint)lp; break;
case (10): alu_operation = (uint)lp; break;
case (11): alu_jump_cond = (uint)lp; break;
case (12): loop_counter = (uint)lp; break;
}
}
}
private void draw_alu(Graphics g,int x, int y)
{
Pen p = new Pen(Color.Black, 2);
Point[] ps = {new Point(10+x, 30+y), new Point(220+x, 30+y),
new Point(200+x, 130+y), new Point(30+x, 130+y)};
//愜傟慄傪堷偔
g.DrawPolygon(p, ps);
string a_port_str = alu_port_a.ToString("X4");
string b_port_str = alu_port_b.ToString("X4");
string write_port_str = alu_out_port.ToString("X4");
string alu_op_str = "僆儁儗乕僔儑儞";
switch (alu_operation)
{
case (0): alu_op_str += "Add"; break;
case (2): alu_op_str += "Sub"; break;
case (3): alu_op_str += " >> "; break;
case (4): alu_op_str += " << "; break;
case (5): alu_op_str += " Jump";
switch (alu_jump_cond)
{
case (0): alu_op_str += "if Eq"; break;
case (1): alu_op_str += "if Not Eq"; break;
case (2): alu_op_str += "Always"; break;
case (3): alu_op_str += "Always Not"; break;
case (4): alu_op_str += "if < "; break;
case (5): alu_op_str += "if > "; break;
case (6): alu_op_str += "if <= "; break;
case (7): alu_op_str += "if >= "; break;
}
break;
}
Font objFont1 = new Font("俵俽 俹僑僔僢僋", 11);
g.DrawString(a_port_str, objFont1, Brushes.Blue, 50+x, 30+y);
g.DrawString(b_port_str, objFont1, Brushes.Blue, 150+x, 30+y);
g.DrawString(write_port_str, objFont1, Brushes.Blue, 100+x, 110+y);
g.DrawString(alu_op_str, objFont1, Brushes.Blue, 25 + x, 70 + y);
}
private void draw_regfile(Graphics g, int x, int y)
{
Pen p = new Pen(Color.Black, 2);
Point[] ps = {new Point(10+x, 30+y), new Point(220+x, 30+y),
new Point(220+x, 130+y), new Point(10+x, 130+y)};
//愜傟慄傪堷偔
g.DrawPolygon(p, ps);
string a_port_str = regfile_a_port.ToString("X4");
string b_port_str = regfile_b_port.ToString("X4");
string write_port_str = regfile_write_port.ToString("X4");
string regfile_zero_str = "丒僛儘儗僕丂=0";
string regfile_R0_str = "丒R0 丂="+regfile_R0.ToString("X4");
string regfile_R1_str = "丒R1 丂="+regfile_R1.ToString("X4");
string regfile_Port_str = "丒億乕僩儗僕="+regfile_PORT.ToString("X4");
Font objFont1 = new Font("俵俽 俹僑僔僢僋", 11);
g.DrawString(a_port_str, objFont1, Brushes.Blue, 70, 140);
g.DrawString(b_port_str, objFont1, Brushes.Blue, 180, 140);
g.DrawString(write_port_str, objFont1, Brushes.Blue, 130, 60);
g.DrawString(regfile_zero_str, objFont1, Brushes.Green, 50, 75);
g.DrawString(regfile_R0_str, objFont1, Brushes.Green, 50, 90);
g.DrawString(regfile_R1_str, objFont1, Brushes.Green, 50, 105);
g.DrawString(regfile_Port_str, objFont1, Brushes.Green, 50, 120);
}
private void draw_pc(Graphics g, int x, int y)
{
Pen p = new Pen(Color.Black, 2);
Point[] ps = {new Point(10+x, 10+y), new Point(140+x, 10+y),
new Point(140+x, 40+y), new Point(10+x, 40+y)};
//愜傟慄傪堷偔
g.DrawPolygon(p, ps);
Font objFont1 = new Font("俵俽 俹僑僔僢僋", 12);
string str;
str = "PC=";
str += current_pc.ToString("d2");
g.DrawString(str, objFont1, Brushes.Blue, 10, 20);
string lc_str="LC=";
lc_str += loop_counter.ToString("x4");
Font objFont2 = new Font("俵俽 俹僑僔僢僋", 10);
g.DrawString(lc_str, objFont2, Brushes.Blue, 80, 45);
if (checkedListBox1.Items.Count > current_pc)
{
checkedListBox1.SetSelected(current_pc , true);
}
string clock_str = "Total "+clock.ToString("x4") +"Clocks";
g.DrawString(clock_str, objFont1, Brushes.Brown, 145, 5);
}
private void paint(object sender, PaintEventArgs e)
{
Graphics g = e.Graphics;
Pen p = new Pen(Color.Black, 2);
draw_regfile(g, 30, 30);
g.DrawLine(p, 90, 160, 90, 230);
g.DrawLine(p, 200, 160, 200, 230);
draw_alu(g,30,200);
g.DrawLine(p, 150, 330, 150, 360);
g.DrawLine(p, 150, 360, 290, 360);
g.DrawLine(p, 290, 360, 290, 30);
g.DrawLine(p, 290, 30, 150, 30);
g.DrawLine(p, 150, 30, 150, 60);
}
protected override void WndProc(ref Message m)
{
const int WM_CLOSE = 0x0010;
const int WM_ENDSESSION = 0x16;
const int WM_SYSCOMMAND = 0x112;
const int SC_CLOSE = 0xF060;
const int WM_COMMAND = 0x111;
const int WM_SIZE = 0x0005;
switch (m.Msg)
{
case WM_ENDSESSION:
//OS偺僔儍僢僩僟僂儞偱暵偠傜傟傛偆偲偟偰偄傞
//Console.WriteLine("WM_ENDSESSION");
break;
case WM_SYSCOMMAND:
//if (m.WParam.ToInt32() == SC_CLOSE)
//X儃僞儞丄僐儞僩儘乕儖儊僯儏乕偺乽暵偠傞乿丄
//僐儞僩儘乕儖儃僢僋僗偺僟僽儖僋儕僢僋丄
//Atl+F4側偳偵傛傝暵偠傜傟傛偆偲偟偰偄傞
// Console.WriteLine("SC_CLOSE");
break;
case WM_CLOSE:
//Application.Exit埲奜偱暵偠傜傟傛偆偲偟偰偄傞
//Console.WriteLine("WM_CLOSE");
break;
case WM_SIZE:
pictureBox1.Refresh();
pictureBox2.Refresh();
break;
case WM_COMMAND:
wp = (int)m.WParam;
lp = (int)m.LParam;
clock++;
draw_values();
pictureBox1.Refresh();//嵞僪儘乕
pictureBox2.Refresh();
break;
}
base.WndProc(ref m);//base偺屻偵彂偒姺偊側偄偲偩傔
if (m.Msg==WM_COMMAND && wp == 0)//偙偺屻$stop偡傞偺偱丄偙偺僐儅儞僪偼嵟屻偵憲傞偙偲
{
if (checkedListBox1.Items.Count > current_pc)
{
if (checkedListBox1.GetItemChecked(current_pc))//Breakpoint僠僃僢僋偑On側傜
{
m.Result = (IntPtr)(-1);//Mark As breakpoint
}
}
}
}
private void paint_picture_box2(object sender, PaintEventArgs e)
{
Graphics g = e.Graphics;
Pen p = new Pen(Color.Black, 2);
draw_pc(g, 0, 0);
}
private void StepButton(object sender, EventArgs e)
{
const int WM_COMMAND = 0x111;
int veritakwin_handle=FindWindow(0,"VeritakWin");
if (veritakwin_handle !=0) {//VeritakWin偑懚嵼偡傞側傜
PostMessage(veritakwin_handle,WM_COMMAND,133,0);//GO丂Command 傪VeritakWin偵憲傞
}
}
private void checkedListBox1_double_click(object sender, MouseEventArgs e)
{
}
private void Stop_Button_clicked(object sender, EventArgs e)
{
const int WM_COMMAND = 0x111;
int veritakwin_handle = FindWindow(0, "VeritakWin");
if (veritakwin_handle != 0)
{//VeritakWin偑懚嵼偡傞側傜
PostMessage(veritakwin_handle, WM_COMMAND, 134, 0);//GO丂Command 傪VeritakWin偵憲傞
}
}
private void Reload_and_go_Button_clicked(object sender, EventArgs e)
{
const int WM_COMMAND = 0x111;
int veritakwin_handle = FindWindow(0, "VeritakWin");
if (veritakwin_handle != 0)
{//VeritakWin偑懚嵼偡傞側傜
PostMessage(veritakwin_handle, WM_COMMAND, 153, 0);//GO丂Command 傪VeritakWin偵憲傞
}
}
}
}
CPU 偺奼挘
偝偰丄堦墳忋偺婰弎偱摦偒傑偡偑丄傗偼傝帺暘偱偄偠偭偰傒側偄偲椙偔暘偐傜側偄偐傕偟傟傑偣傫丅惀旕丄忋傪悧宍偲偟偰丄
- 帺暘偺柦椷傪偮偔傞
- 儅僋儘僐乕僪傪掕媊偟偰傒傞
- 僾儘僌儔儉偟偰傒傞丂乮ROM僐乕僪傪彂偄偰傒傞乯
偲偄偆曄峏傪峴偭偰傒偰偔偩偝偄丅埲壓偼丄偄偔偮偐偺奼挘埬偱偡丅
- 榑棟墘嶼傪擖傟傞丂AND/OR/XOR
- 忔嶼婍傪擖傟傞
- 僶儗儖僔僼僞傪擖傟傞
傕偪傠傫丄MAX2偱摦偐偡偲側傞偲柍棟偐傕偟傟傑偣傫偑丄僔儈儏儗乕僔儑儞傪峴偆暘偵偼丄帺桼偱偡丅
偦傟偱偼丄幚嵺偵丄曄峏傪壛偊傞椺傪傗偭偰傒傑偟傚偆丅
巇條偼丄師偺僐儅儞僪傪捛壛偡傞傕偺偲偟傑偡丅ifdef 偱捛壛偟偰偄傑偡丅
ADDITIONAL_COMMAND偑define偝傟偰偄傞偲偒偵丄Enable偝傟傑偡丅偙偺傛偆偵偟偰偍偔偲丄尦偵栠偟偨偄偲偒偵曋棙偱偡丅

側傫偲丄忔嶼婍傑偱丄掕媊偟偰偟傑偄傑偟偨丅戝忎晇偱偟傚偆偐丠
師偼丄ALU偵墘嶼婰弎傪捛壛偟傑偡丅忔嶼偼丄8x8=16價僢僩晞崋側偟偵側傝傑偡丅
偦傟偐傜丄parameter 掕媊傕捛壛偟偰偍偒傑偡丅
嵟屻偵ROM丂僐乕僪偱偡丅
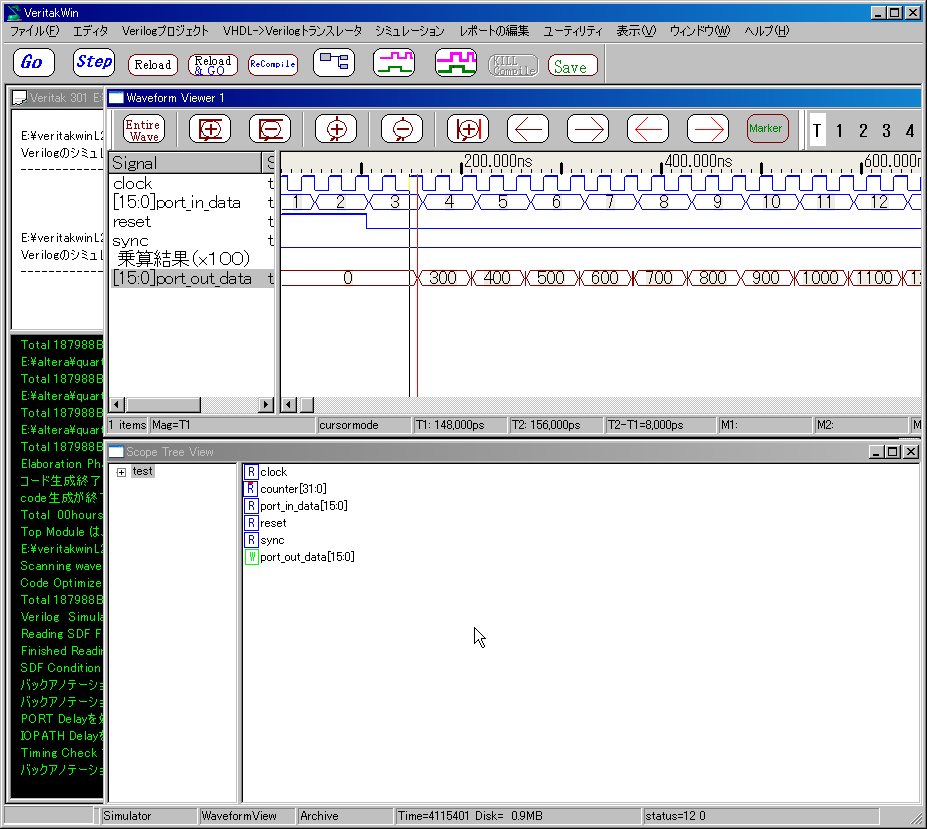
擖椡偺抣傪100攞偟偰丄弌椡億乕僩偵彂偒弌偟偰偄傑偡丅
MAX2偱偺崌惉寢壥偱偡丅傆偅丄廂傑傝傑偟偨丅
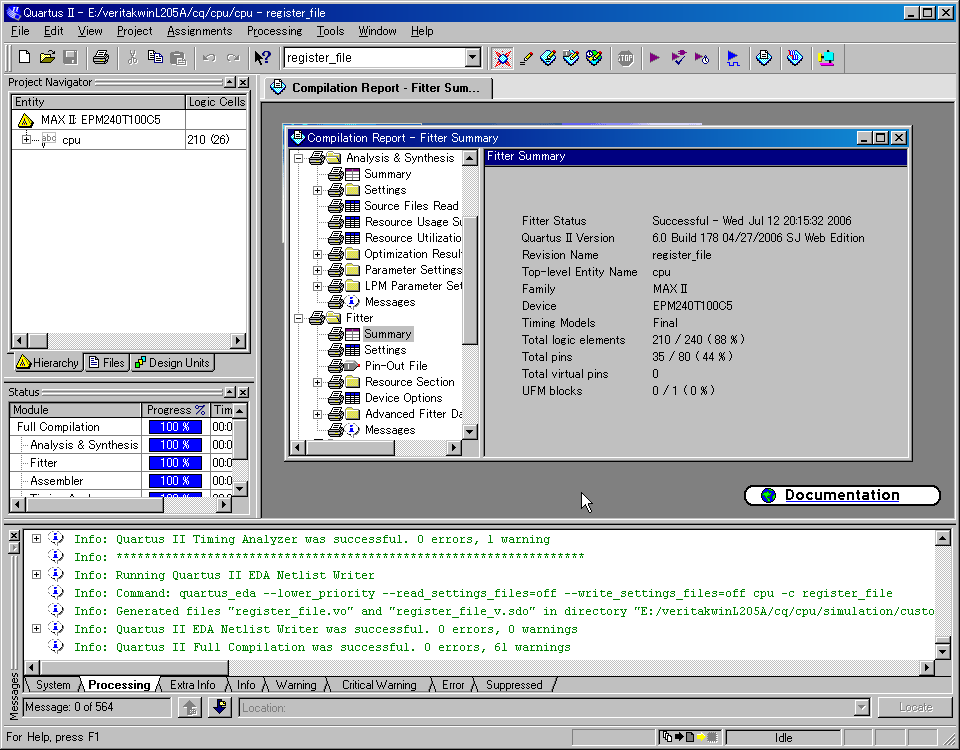
41MHz偱憱傞偦偆偱偡丅
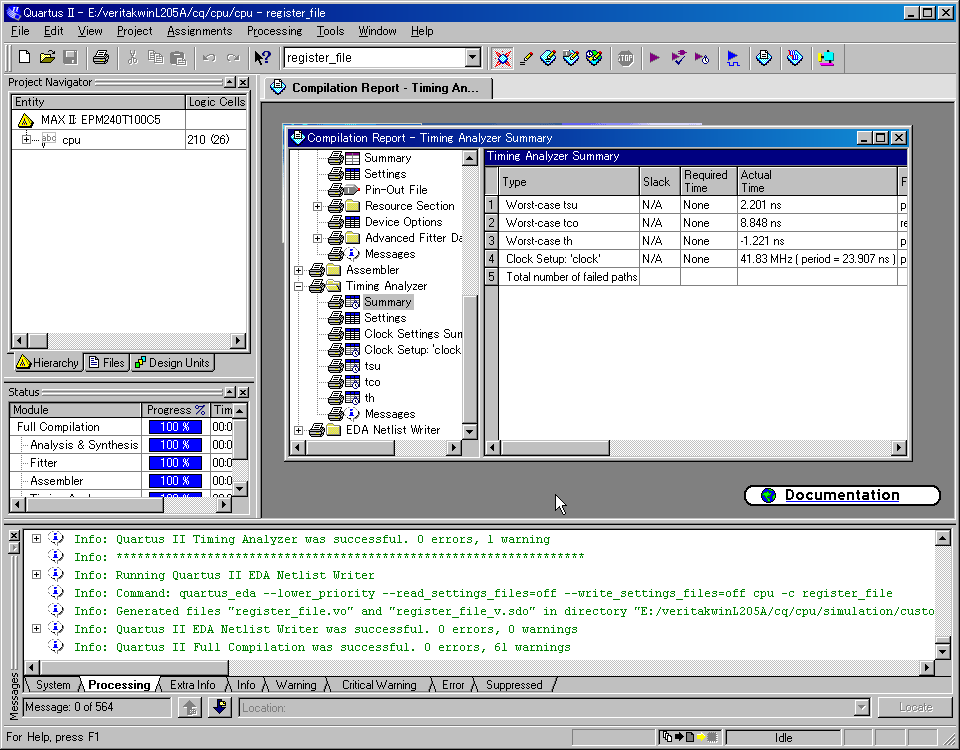
抶墑僔儈儏儗乕僔儑儞偱偡丅
僋儘僢僋僄僢僕偐傜8ns掱搙抶傟傑偡偑丄偪傖傫偲100攞偵側偭偰曉偭偰偒傑偟偨丅
傕偆丄偙偺儅僕僢僋偼丄偍暘偐傝偱偡偹丅僴乕僪偲偟偰偺ROM傪夝愅偡傞偲ADD傗丄SUB丄偦偺懠儘僕僢僋偼巊傢傟偰偄側偄偙偲傪崌惉婍偼暘偐偭偨偺偱偟傚偆丅
偙傟傪丄弮ROM偲偟偰掕媊偟偰偟傑偆偲丄忔嶼婍偼惁偔怘偆偺偱丄摓掙嵹傜側偄偱偟傚偆丅
亙師偺奼挘傾僀僨傾亜
偲偙傠偱丄偙偺忔嶼婍偼丄JUMP偑擖偭偰偄傞偨傔偵丄俀CYCLE偐偐偭偰偟傑偭偰偄傑偡丅偙偙偵儖乕僾柦椷傪傕偭偰偔傟偽丄儖乕僾婜娫偼丄侾CYCLE偱張棟偱偒傑偡丅
偙傟偼丄儅僋儘柦椷傪掕媊偡傞偩偗偱壜擻偱偡丅埥偄偼丄JUMP柦椷偲梈崌偡傞偲偄偆傾僀僨傾傕壜擻偱偟傚偆丅柦椷偑廔傢偭偨傜忢偵僕儍儞僾偡傞偲偄偆嬶崌偱偡丅
乮IMMEDIATE柦椷傪彍偒丄偙偺僼傿乕儖僪偼丄梀傫偱偄傑偡乯岾偄丄儅僀僋儘僼傿乕儖僪偼丄枹偩2價僢僩巆偭偰偄傑偡偺偱丄偙偺價僢僩傪巊偭偰丄價僢僩偑棫偭偰偄傞偲偒偩偗丄偦偆偄偆晽偵偡傞偲偄偆偙偲傕偱偒傑偡丅
埥偄偼丄偙偺CPU傪壗屄偑暲楍偱巊偆傾僀僨傾傕偁傝偱偟傚偆丅妱傝崬傒側傫偰丄1僒僀僋儖偱張棟偱偒偰偟傑偄傑偡丅丅
僗僥乕僩儅僔儞偱偼丄暋嶨偡偓傞丄CPU偱偼抶偡偓傞偲偄偆応崌偵岲揔側僴乕僪偲僜僼僩偺拞娫傒偨偄側儅僔儞偱偡丅偙偆偄偆僴乕僪傪儅僀僋儘僔乕働儞僒偲屇傫偱偄傑偡丅
愄偺CISC儅僔儞乮俇俉侽侽侽偺帪戙乯偼丄儅僀僋儘僔乕働儞僒偱惂屼偝傟偰偄偨偲巚偄傑偡丅CPU偺拞偺CPU偦傟偑丄儅僀僋儘僔乕働儞僒偱偡丅
傾乕僇僀僽偱偡丅
亙斣奜曇亜
ST2偩偲偳偆側傞偐傗偭偰傒傑偟偨丅摦嶌懍搙140Mz丄儕僜乕僗2%偺徚旓偱偟偨丅
儐乕僓Contribution![]()
儐乕僓條偐傜丄奼挘椺傪偄偨偩偒傑偟偨丅
埲壓偼丄嶌幰偺曽偺僐儊儞僩偱偡丅
億乕僩擖弌椡傪柧帵揑偵暘偗偨傝丄柦椷僙僢僩傗摦嶌巇條傪
帺暘側傝偵偟偭偔傝棃傞傛偆偵曄峏偟偨傝偟偰傒傑偟偨丅
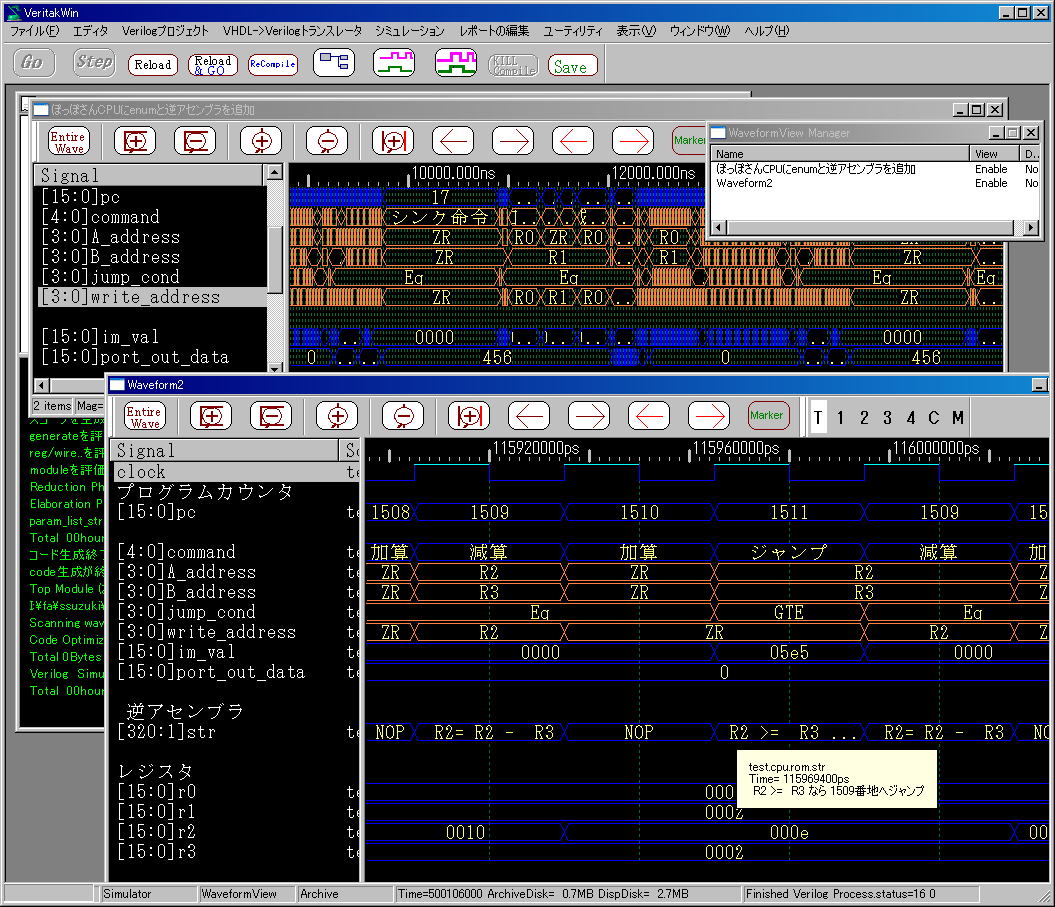
ROM偺儅僀僋儘僐乕僪偩偗尒偰偄傞偲丄傾僙儞僽儔傒偨偄(徫)
// 僶儗儖僔僼僞
1514: `SET(R0,
2);
1515: `SET(R1, 7);
1516: `SET(R2, 0);
1517: `BSHIFT_L(R0, R1,
R0);
1518: `BSHIFT_R(R0, R1, R0);
偱傕丄幚偼慻傒崌傢偣夞楬偵崌惉偝傟傞曈傝丄壗偩偐丄妝偟偄偱偡偹丅
挷巕偵忔偭偰丄柦椷偲偐憹傗偟偨傝丄
ROM弌椡偺價僢僩暆傪憹傗偟偨傝偟偰傒傑偟偨偑丄
僋儕僥傿僇儖僷僗偑塿乆挿偔側偭偰偟傑偄傑偟偨丅 丅
僜乕僗偱偡丅
// 儅僀僋儘僾儘僌儔儉曽幃 CPU
// 僱僀僥傿僽僐儅儞僪
`define ADD_com 5'b00000
`define SET_com 5'b00001
`define SUB_com 5'b00010
`define SHIFT_L_com 5'b00011
`define SHIFT_R_com 5'b00100
`define JMP_com 5'b00101
`define SYNC_com 5'b00110
`define AND_com 5'b00111
`define OR_com 5'b01000
`define XOR_com 5'b01001
`define NOT_com 5'b01010
`define MUL_com 5'b01011
`define BSHIFT_L_com 5'b01100
`define BSHIFT_R_com 5'b01101
// 僕儍儞僾忦審
`define Eq 4'b0000
`define Not_Eq 4'b0001
`define Always 4'b0010
`define LT 4'b0011
`define GT 4'b0100
`define LTE 4'b0101
`define GTE 4'b0110
// 儗僕僗僞傾僪儗僗
`define ZR 4'b0000
`define R0 4'b0001
`define R1 4'b0010
`define R2 4'b0011
`define R3 4'b0100
`define P_IN 4'b0101
`define P_OUT 4'b0110
// CPU
module cpu(input clock, reset,
input [15:0] port_in_data,
input sync,
output [15:0] port_out_data);
localparam integer Loop_counter_width=16;
localparam integer Stop_count = 2**Loop_counter_width -1;
reg [Loop_counter_width-1:0] loop_counter;
reg [15:0] pc;
// reg [15:0] port_in_reg;
reg sync_ff, sync_ff2;
/*----------------------------------------------------------------------------
ROM儚僀儎乕儅僢僾
價僢僩埵抲 價僢僩暆 撪梕
39:35 5 柦椷
34:31 4 儗僕僗僞僼傽僀儖A億乕僩偺傾僪儗僗
30:27 4 儗僕僗僞僼傽僀儖B億乕僩偺傾僪儗僗
26:23 4 儗僕僗僞僼傽僀儖儔僀僩億乕僩偺傾僪儗僗
22:19 4 僕儍儞僾斾妑忦審
18:16 3 彨棃奼挘梡
16:16 1 loop_flag 儖乕僾張棟偡傞偐偳偆偐偺僼儔僌丄侾偱儖乕僾張棟
15:0 16 懄抣傑偨偼丄旘傃愭
-----------------------------------------------------------------------------*/
wire [39:0] rom_data;
wire [4:0] command = rom_data[39:35];
wire [3:0] A_address = rom_data[34:31];
wire [3:0] B_address = rom_data[30:27];
wire [3:0] write_address = rom_data[26:23];
wire [3:0] jump_cond = rom_data[22:19];
wire [2:0] reserved = rom_data[18:16];
wire [15:0] immediate_data = rom_data[15:0];
wire loop_flag = reserved[0];
wire [15:0] out_dataA, out_dataB;
wire [15:0] alu_data;
// SET僐儅儞僪偺帪偼丄"A億乕僩偵戙擖偡傞抣" 傪愙懕偡傞丅
// 仸 ALU偱 僛儘儗僕僗僞偲壛嶼偟偰戙擖偡傞帠偱丄SET傪幚尰偡傞堊丅
wire [15:0] Aport_data = (command==`SET_com) ? immediate_data : port_in_data;
//儖乕僾僇僂儞僞儕僙僢僩忦審
wire Reset_loop_counter = (loop_counter<2)||
(loop_counter==Stop_count && immediate_data == 16'b0)
? 1 : 0;
//儖乕僾僇僂儞僞偺張棟
always @(posedge clock, posedge reset) begin
if(reset)
begin
loop_counter <= Stop_count;
end
else if(Reset_loop_counter)
begin
loop_counter <= Stop_count;
end
else if(loop_flag && loop_counter==Stop_count)
begin
// 儖乕僾僇僂儞僩抣傪僙僢僩
loop_counter <= immediate_data;
end
//else if ((loop_flag) && (loop_counter>1))
else if(loop_flag)
begin
// 儖乕僾張棟
loop_counter <= loop_counter - 16'b1;
end
else
begin
loop_counter <= Stop_count;
end
end
// 擖椡摨婜僄僢僕専弌
always @(posedge clock, posedge reset) begin
if (reset) sync_ff<=0;
else sync_ff<=sync;
end
always @(posedge clock, posedge reset) begin
if (reset) sync_ff2<=0;
else sync_ff2<=sync_ff;
end
// 棫偪忋偑傝僄僢僕傪専弌
wire sync_pos_edge_detected = sync_ff & ~sync_ff2;
// 儅僀僋儘僾儘僌儔儉僇僂儞僞
always @(posedge clock, posedge reset) begin
if(reset)
begin
pc <= 0;
end
// 僕儍儞僾柦椷張棟
else if(command==`JMP_com && alu_data[0]==1'b1)
begin
//旘傫偱偄偗
pc <= immediate_data;
end
else if(command==`SYNC_com)
begin //摨婜懸偪僗僞乕僩張棟
if(sync_pos_edge_detected)
begin
//摨婜怣崋傪専弌丅師偺傾僪儗僗傪幚峴奐巒丅
pc <= pc + 1;
end
else
begin
//摨婜僄僢僕偑棃傞傑偱懸偮
pc <= pc;
end
end
else if(loop_flag)
begin //儖乕僾張棟
if(Reset_loop_counter)
begin
//儖乕僾張棟偐傜敳偗傞
pc <= pc + 1;
end
else
begin
//僟僂儞僇僂儞僩拞偼懸偮
pc <= pc;
end
end
else
begin
// 壗傕側偄帪偼師偺傾僪儗僗傪幚峴奐巒
pc <= pc + 1;
end
end
/*
//input reg
always @(posedge clock, posedge reset)
begin
if(reset)
begin
port_in_reg<=0;
end
else
begin
port_in_reg<=port_in_data;
end
end
*/
// 儗僕僗僞僼傽僀儖
register_file register_file(.clock(clock),
.reset(reset),
.A_address(A_address),
.B_address(B_address),
.write_address(write_address),
.alu_data(alu_data),
.out_dataA(out_dataA),
.out_dataB(out_dataB),
.port_in_data(Aport_data),
.port_out_data(port_out_data));
// ALU
alu alu(.command(command),
.jump_cond(jump_cond),
.portA(out_dataA),
.portB(out_dataB),
.alu_out(alu_data));
// ROM
rom rom(.rom_address(pc),.Data(rom_data));
endmodule
// 儗僕僗僞僼傽僀儖
// 婰壇慺巕傪儗僕僗僞偺廤傑傝偲偟偰丄傑偲傔偰儌僕儏乕儖壔丅
// 摨帪偵撉傒彂偒偱偒傞億乕僩偑俁偮
// 儔僀僩億乕僩偑侾偮丄儕乕僪億乕僩偑俀偮丅
module register_file(input clock,
input reset,
input [3:0] A_address,
input [3:0] B_address,
input [3:0] write_address,
input [15:0] alu_data, port_in_data,
output [15:0] out_dataA, out_dataB, port_out_data);
// CPU儗僕僗僞
reg [15:0] p_out_reg, r0, r1, r2, r3;
// 億乕僩傾僂僩儗僕僗僞
always @(posedge clock, posedge reset) begin
if(reset)
begin
p_out_reg <= 0;
end
else if(write_address == `P_OUT)
begin
p_out_reg <= alu_data;
end
else
begin
p_out_reg <= p_out_reg;
end
end
// 斈梡儗僕僗僞R0
always @(posedge clock, posedge reset) begin
if(reset)
begin
r0 <= 0;
end
else if(write_address == `R0)
begin
r0 <= alu_data;
end
else
begin
r0 <= r0;
end
end
// 斈梡儗僕僗僞R1
always @(posedge clock, posedge reset) begin
if(reset)
begin
r1 <= 0;
end
else if(write_address == `R1)
begin
r1 <= alu_data;
end
else
begin
r1 <= r1;
end
end
// 斈梡儗僕僗僞R2
always @(posedge clock, posedge reset) begin
if(reset)
begin
r2 <= 0;
end
else if(write_address == `R2)
begin
r2 <= alu_data;
end
else
begin
r2 <= r2;
end
end
// 斈梡儗僕僗僞R3
always @(posedge clock, posedge reset) begin
if(reset)
begin
r3 <= 0;
end
else if(write_address == `R3)
begin
r3 <= alu_data;
end
else
begin
r3 <= r3;
end
end
// A億乕僩弌椡(ALU傊)
assign out_dataA = (A_address==`P_OUT) ? p_out_reg :
(A_address==`P_IN) ? port_in_data :
(A_address==`R0) ? r0 :
(A_address==`R1) ? r1 :
(A_address==`R2) ? r2 :
(A_address==`R3) ? r3 : 16'b0;
// B億乕僩弌椡(ALU傊)
assign out_dataB = (B_address==`P_OUT) ? p_out_reg :
(B_address==`P_IN) ? port_in_data :
(B_address==`R0) ? r0 :
(B_address==`R1) ? r1 :
(B_address==`R2) ? r2 :
(B_address==`R3) ? r3 : 16'b0;
// 弌椡億乕僩(偦偺傑傑弌椡)
assign port_out_data = p_out_reg;
endmodule
// ALU
module alu(input [4:0] command,
input [3:0] jump_cond,
input [15:0] portA,portB,
output reg [15:0] alu_out);
always @(*) begin
case (command)
`ADD_com: alu_out=portA+portB;
`SUB_com: alu_out=portA-portB;
`SHIFT_L_com: alu_out=portB << 1;
`SHIFT_R_com: alu_out=portB >> 1;
`BSHIFT_L_com:alu_out=portA << portB;
`BSHIFT_R_com:alu_out=portA >> portB;
`MUL_com: alu_out=portA * portB;
`AND_com: alu_out=portA & portB;
`OR_com: alu_out=portA | portB;
`XOR_com: alu_out=portA ^ portB;
`NOT_com: alu_out=~portA;
`JMP_com:
case (jump_cond)
`Eq: alu_out=(portA == portB);
`Not_Eq: alu_out=(portA != portB);
`Always: alu_out=1;
`LT: if (portA < portB)
alu_out=1;
else
alu_out=0;
`GT: if (portA > portB)
alu_out=1;
else
alu_out=0;
`LTE: if (portA <= portB)
alu_out=1;
else
alu_out=0;
`GTE: if (portA >= portB)
alu_out=1;
else
alu_out=0;
default: alu_out=0;
endcase
default: alu_out=portA+portB;
endcase
end
endmodule
module rom(input [15:0] rom_address,
output [39:0] Data);
assign Data = romdata(rom_address);
//TAK start
wire [4:0] command = Data[39:35];
wire [3:0] A_address = Data[34:31];
wire [3:0] B_address = Data[30:27];
wire [3:0] write_address = Data[26:23];
wire [3:0] jump_cond = Data[22:19];
wire [15:0] im_val=Data[15:0];
wire [2:0] loop_cond=Data[18:16];
//TAK end
// 僐儅儞僪
parameter [4:0] Set=`SET_com,
Add=`ADD_com,
Sub=`SUB_com,
Shift_L=`SHIFT_L_com,
Shift_R=`SHIFT_R_com,
Jmp=`JMP_com,
Sync=`SYNC_com,
Mul=`MUL_com,
And=`AND_com,
Or =`OR_com,
Xor=`XOR_com,
Not=`NOT_com,
BShift_L=`BSHIFT_L_com,
BShift_R=`BSHIFT_R_com;
parameter [4:0] \僙僢僩 =`SET_com,
\壛嶼 =`ADD_com,
\尭嶼 =`SUB_com,
\嵍僔僼僩 =`SHIFT_L_com,
\塃僔僼僩 =`SHIFT_R_com,
\僕儍儞僾 =`JMP_com,
\僔儞僋柦椷 =`SYNC_com,
\忔嶼 =`MUL_com,
\仌 =`AND_com,
\OR =`OR_com,
\XOR =`XOR_com,
\NOT =`NOT_com,
\嵍僶儗儖僔僼僩 =`BSHIFT_L_com,
\塃僶儗儖僔僼僩 =`BSHIFT_R_com;
// 儗僕僗僞傾僪儗僗
parameter [3:0] P_OUT=`P_OUT,//IO億乕僩弌椡
P_IN=`P_IN, //IO億乕僩擖椡
R0= `R0,
R1= `R1,
R2= `R2,
R3= `R3,
ZR= `ZR; // 僛儘儗僕僗僞 (= 僛儘GND)
// 僕儍儞僾忦審
parameter [3:0] Eq=`Eq,
Not_Eq=`Not_Eq,
Always=`Always,
LT=`LT,
GT=`GT,
LTE=`LTE,
GTE=`GTE;
// 儖乕僾張棟
parameter [2:0] Reserved = 3'b000,
LoopEnabled = 3'b001;
// 儅僋儘柦椷
// NOP
`define NOP romdata={Add,ZR,ZR,ZR,Eq,Reserved,16'h 0000}
// 僐僺乕 : r0 仺 r1
`define MOV(r0,r1) romdata={Add,r0,ZR,r1,Eq,Reserved,16'h 0000}
// 僋儕傾 : r0 = 0
`define CLR(r0) romdata={Add,ZR,ZR,r0,Eq,Reserved,16'h 0000}
// 掕悢戙擖 : r0 = num
`define SET(r0,num) romdata={Set,P_IN,ZR,r0,Eq,Reserved,16'd num}
// 僕儍儞僾
`define JUMP(num) romdata={Jmp,ZR,ZR,ZR,Always,Reserved,16'd num}
// 榑棟斀揮
`define NOT(r0,r1) romdata={Not,r0,ZR,r1,Always,Reserved,16'h 0000}
// 懌偟嶼 : r2 = r0 + r1
`define ADD(r0,r1,r2) romdata={Add,r0,r1,r2,Eq,Reserved,16'h 0000}
// 堷偒嶼 : r2 = r0 - r1
`define SUB(r0,r1,r2) romdata={Sub,r0,r1,r2,Eq,Reserved,16'h 0000}
// 忔嶼 : r2 = r0 * r1
`define MUL(r0,r1,r2) romdata={Mul,r0,r1,r2,Eq,Reserved,16'h 0000}
// 忦審暥 : if(r0<r1) goto num;
`define JUMP_IF_LT(r0,r1,num) romdata={Jmp,r0,r1,ZR,LT,Reserved,16'd num}
// 忦審暥 : if(r0>r1) goto num;
`define JUMP_IF_GT(r0,r1,num) romdata={Jmp,r0,r1,ZR,GT,Reserved,16'd num}
// 忦審暥 : if(r0<=r1) goto num;
`define JUMP_IF_LTE(r0,r1,num) romdata={Jmp,r0,r1,ZR,LTE,Reserved,16'd num}
// 忦審暥 : if(r0>=r1) goto num;
`define JUMP_IF_GTE(r0,r1,num) romdata={Jmp,r0,r1,ZR,GTE,Reserved,16'd num}
// 忦審暥 : if(r0==r1) goto num;
`define JUMP_IF_EQ(r0,r1,num) romdata={Jmp,r0,r1,ZR,Eq,Reserved,16'd num}
// 1價僢僩僔僼僩
`define SHIFT_L(r0,r1) romdata={Shift_L,ZR,r0,r1,Eq,Reserved,16'h 0000}
`define SHIFT_R(r0,r1) romdata={Shift_R,ZR,r0,r1,Eq,Reserved,16'h 0000}
// 僶儗儖僔僼僩
`define BSHIFT_L(r0,r1,r2) romdata={BShift_L,r0,r1,r2,Eq,Reserved,16'h 0000}
`define BSHIFT_R(r0,r1,r2) romdata={BShift_R,r0,r1,r2,Eq,Reserved,16'h 0000}
// 奜晹擖椡丒棫偪忋偑傝僄僢僕傑偱懸偮
`define SYNC romdata={Sync,ZR,ZR,ZR,Eq,Reserved,16'h 0000}
// 儖乕僾孞傝曉偟柦椷(JUMP柦椷暘偺1僋儘僢僋傪愡栺)
// ex : r2 = r0 + r1 傪 num+1 夞孞傝曉偡丅偦偺娫丄pc 偼 尰傾僪儗僗偱懸婡丅
`define ADD_LOOP(r0,r1,r2,num) romdata={Add,r0,r1,r2,Eq,LoopEnabled,16'd num}
`define SUB_LOOP(r0,r1,r2,num) romdata={Sub,r0,r1,r2,Eq,LoopEnabled,16'd num}
`define MUL_LOOP(r0,r1,r2,num) romdata={Mul,r0,r1,r2,Eq,LoopEnabled,16'd num}
`define SHIFT_L_LOOP(r0,num) romdata={Shift_L,ZR,r0,r0,Eq,LoopEnabled,16'd num}
`define SHIFT_R_LOOP(r0,num) romdata={Shift_R,ZR,r0,r0,Eq,LoopEnabled,16'd num}
//Tak start 丂媡傾僙儞僽儔
reg [8*40:1] str;
function [8*3:1] get_rn(input [3:0] addr);
case (addr)
P_OUT: get_rn="OUT";
P_IN: get_rn="IN"; //IO億乕僩擖椡
R0: get_rn="R0";
R1: get_rn="R1";
R2: get_rn="R2";
R3: get_rn="R3";
ZR: get_rn="ZR"; // 僛儘儗僕僗僞 (= 僛儘GND)
default: get_rn="???";
endcase
endfunction
always @* begin
case (command)
Add:
if(loop_cond==0) begin
if (A_address==ZR && B_address==ZR & write_address==ZR) $sformat(str,"NOP");
else if (B_address==ZR && A_address==ZR ) $sformat(str,"%s傪僋儕傾",get_rn(write_address));
else if (B_address==ZR ) $sformat(str,"%s偐傜%s傊僐僺乕",get_rn(A_address),get_rn(write_address));
else $sformat(str,"%s=%s + %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
end else begin
if (A_address==ZR && B_address==ZR & write_address==ZR) $sformat(str,"NOP %d儖乕僾晅",im_val);
else if (B_address==ZR && A_address==ZR ) $sformat(str,"%s傪僋儕傾丂 %d儖乕僾晅",get_rn(write_address),im_val);
else if (B_address==ZR ) $sformat(str,"%s偐傜%s傊僐僺乕丂 %d儖乕僾晅",get_rn(A_address),get_rn(write_address),im_val);
else $sformat(str,"%s=%s + %s %d儖乕僾晅",get_rn(write_address),get_rn(A_address),get_rn(B_address),im_val);
end
Set: $sformat(str,"%s=%h[Hex]",get_rn(write_address),im_val);
Mul:
if (loop_cond==0) begin
$sformat(str,"%s=%s * %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
end else $sformat(str,"%s=%s * %s 丂 %d儖乕僾晅",get_rn(write_address),get_rn(A_address),get_rn(B_address),im_val);
Sub:
if (loop_cond==0) begin
$sformat(str,"%s=%s - %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
end else $sformat(str,"%s=%s - %s %d儖乕僾晅",get_rn(write_address),get_rn(A_address),get_rn(B_address),im_val);
Sync:
$sformat(str,"僔儞僋柦椷");
Not: $sformat(str,"%s=~%s",get_rn(write_address),get_rn(A_address));
Jmp:
if (jump_cond==Always) $sformat(str,"%d斣抧傊僕儍儞僾",im_val);
else if (jump_cond==LT) $sformat(str,"%s < %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==GT) $sformat(str,"%s > %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==LTE) $sformat(str,"%s <= %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==GTE) $sformat(str,"%s >= %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==Eq) $sformat(str,"%s == %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
Shift_L:
if (loop_cond==0) $sformat(str,"%s=%s << 1",get_rn(write_address),get_rn(B_address));
else $sformat(str,"%s=%s << %d",get_rn(write_address),get_rn(B_address),im_val);
Shift_R:
if (loop_cond==0) $sformat(str,"%s=%s >> 1",get_rn(write_address),get_rn(B_address));
else $sformat(str,"%s=%s >> %d",get_rn(write_address),get_rn(B_address),im_val);
BShift_L:
$sformat(str,"%s=%s <<%s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
BShift_R:
$sformat(str,"%s=%s >> %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
endcase
end
//Tak end
// 儅僀僋儘僐乕僪
function [39:0]romdata;
input [15:0] address;
case(address)
//Commad A_addr, B_addr, Write_addr, Jmp_cond, Reserved, IM
0: `SET(P_OUT, 100);
1: `SET(R0, 5);
2: `MOV(R0, R1);
3: `MOV(R1, R2);
4: `MOV(R2, R3);
5: `SUB(R1, R2, R0);
6: `SUB(R3, R1, R3);
7: `ADD(P_IN, P_OUT, P_OUT);
8: `ADD(P_OUT, P_OUT, P_OUT);
9: `SUB(P_IN, P_IN, R1);
10: `SUB(P_OUT, P_IN, R2);
11: `SET(R0, 2);
12: `SET(R1, 8);
13: `MUL(R0, R1, R3);
14: `NOP;
15: `MUL(R3, R3, R3);
16: `ADD(P_OUT, R3, P_OUT);
17: `SYNC;
18: `JUMP(1000);
// 僔僼僩丒忔嶼
1000: `SET(R0, 5);
1001: `SET(R1, 2);
1002: `ADD_LOOP(R0, R1, R0, 10);
1003: `SHIFT_L_LOOP(R1, 5);
1004: `SHIFT_R_LOOP(R1, 5);
1005: `SUB_LOOP(R0, R1, R0, 10);
1006: `SET(P_OUT, 5);
1007: `MUL_LOOP(P_OUT, R1, P_OUT, 7);
1008: `JUMP(1500);
// 忦審暥
1500: `SET(R0, 16);
1501: `SET(R1, 2);
1502: `SET(P_OUT, 0);
1503: `SUB(R0, R1, R0);
1504: `JUMP_IF_GT(R0, R1 ,1503);
// 忦審暥
1505: `SET(R2, 16);
1506: `SET(R3, 2);
1507: `SET(P_OUT, 0);
1509: `SUB(R2, R3, R2);
1511: `JUMP_IF_GTE(R2, R3 ,1509);
// 1010_1010_1010_1010
// 價僢僩斀揮
1512: `SET(R0, 43690);
1513: `NOT(R0, R1);
// 僶儗儖僔僼僞
1514: `SET(R0, 2);
1515: `SET(R1, 7);
1516: `SET(R2, 0);
1517: `BSHIFT_L(R0, R1, R0);
1518: `BSHIFT_R(R0, R1, R0);
1519: `JUMP(0);
default: romdata = 0;
endcase
endfunction
endmodule
傾乕僇僀僽偱偡丅
側偍丄婰弎偺摦嶌妋擣偲偟偰Quartas嘦偱崌惉傪偟偰傒傑偟偨丅僨僶僀僗偼Stratix2
懍搙偼丄72MHz偱偟偨丅
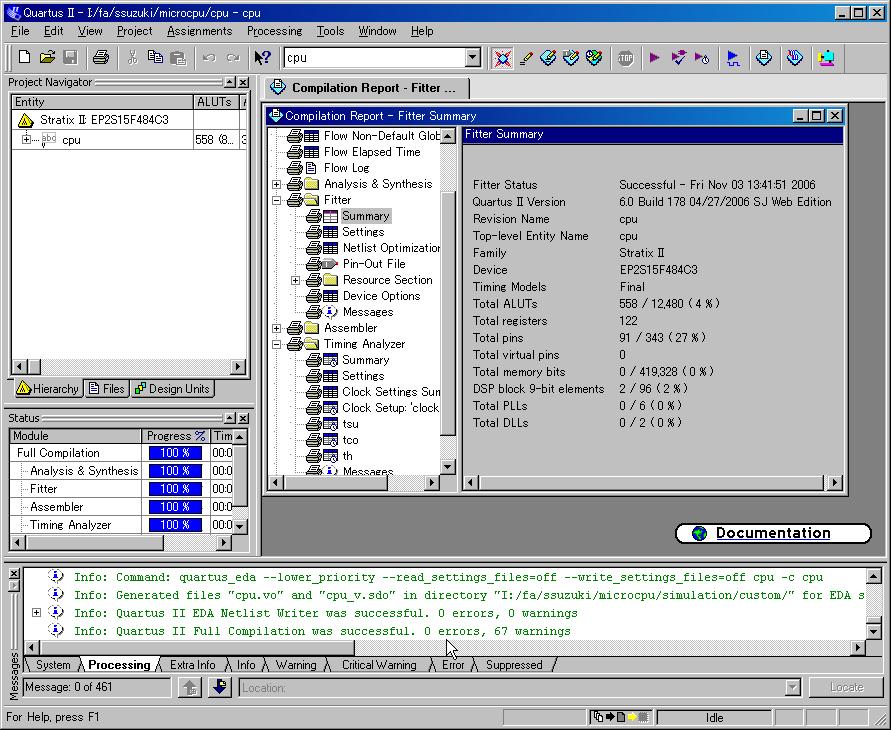
撪晹摦嶌偺妋擣傪偟偨偄堊偵丄pc偲rom_data傪堷偒弌偟偰偄傑偡丅
`Debug 偱丄愗傝懼偊偟偰偄傑偡丅
`define Debug
// CPU
module cpu(input clock, reset,
input [15:0] port_in_data,
input sync,
output [15:0] port_out_data
`ifdef Debug
,
output [39:0] rom_data,
output reg [15:0] pc
`endif
);
localparam integer Loop_counter_width=16;
localparam integer Stop_count = 2**Loop_counter_width -1;
reg [Loop_counter_width-1:0] loop_counter;
`ifndef Debug
reg [15:0] pc;
`endif
// reg [15:0] port_in_reg;
reg sync_ff, sync_ff2;
/*----------------------------------------------------------------------------
ROM儚僀儎乕儅僢僾
價僢僩埵抲 價僢僩暆 撪梕
39:35 5 柦椷
34:31 4 儗僕僗僞僼傽僀儖A億乕僩偺傾僪儗僗
30:27 4 儗僕僗僞僼傽僀儖B億乕僩偺傾僪儗僗
26:23 4 儗僕僗僞僼傽僀儖儔僀僩億乕僩偺傾僪儗僗
22:19 4 僕儍儞僾斾妑忦審
18:16 3 彨棃奼挘梡
16:16 1 loop_flag 儖乕僾張棟偡傞偐偳偆偐偺僼儔僌丄侾偱儖乕僾張棟
15:0 16 懄抣傑偨偼丄旘傃愭
-----------------------------------------------------------------------------*/
`ifndef Debug
wire [39:0] rom_data;
`endif
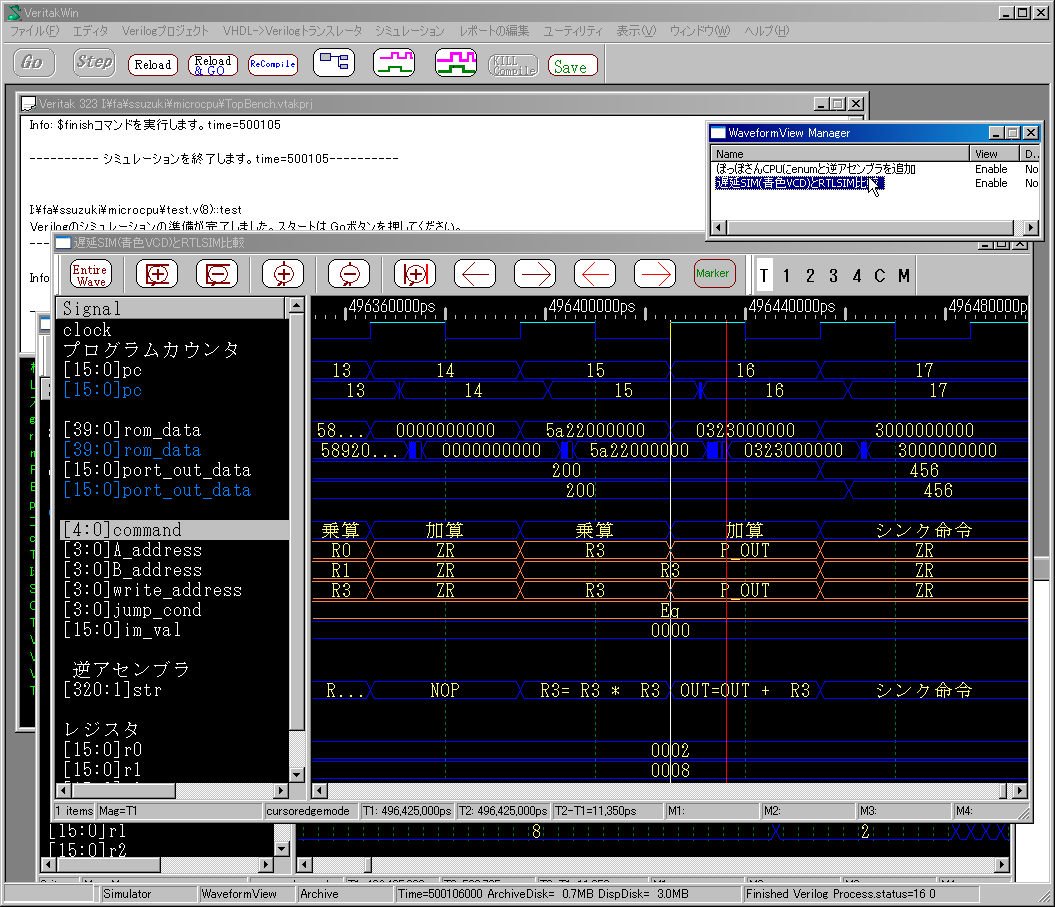
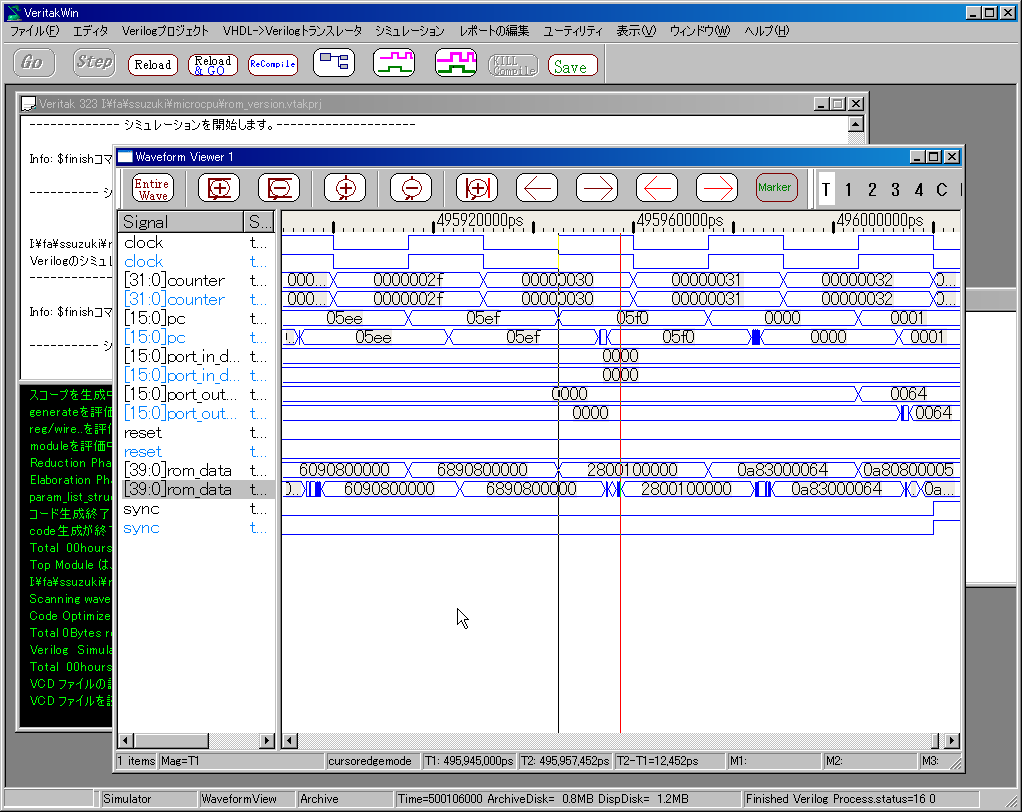
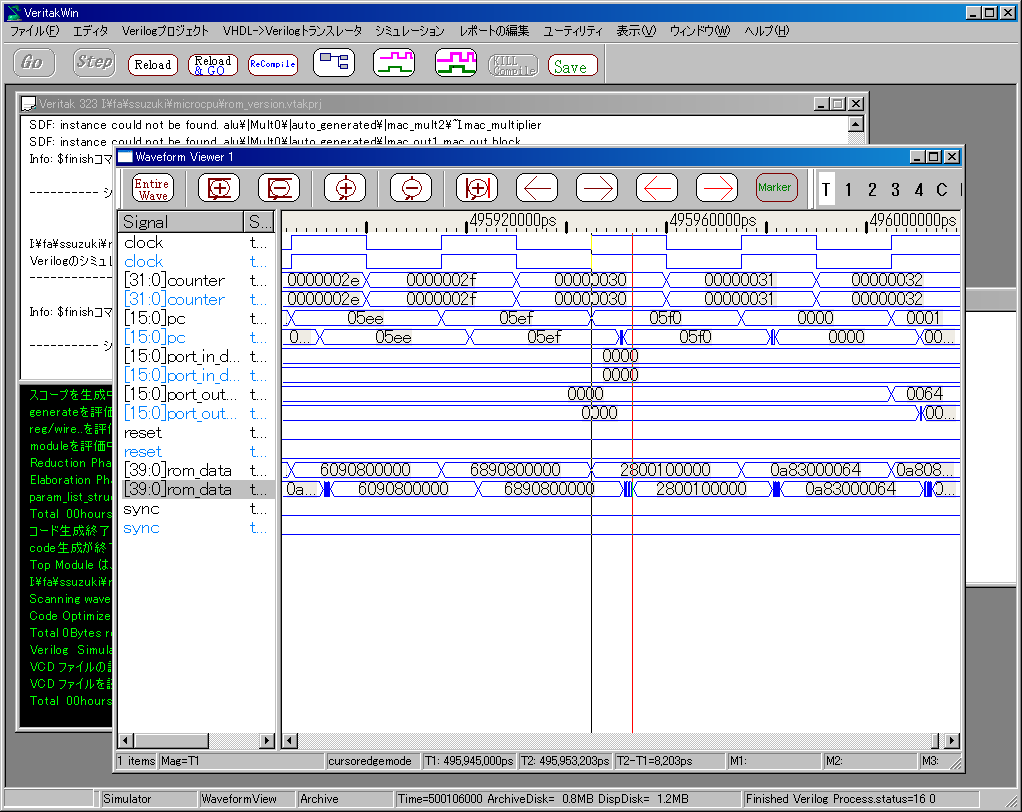
僔儈儏儗乕僔儑儞偺嵟屻偲偙傠偱偡丅惵怓偑抶墑SIM偱丄僩僢僾奒憌偺怣崋傪VCD偱婰榐偟偨傕偺偱偡丅
偝偡偑偵rom_data偺抶墑偑戝偒偔側偭偰偄傑偡偑丄RTL丂SIM偲堦抳偟偰偄傑偡丅
偙傟偱丄摦嶌偺専徹偼廔椆偱偡丅
偙偺CPU傪
spartan3偱傕崌惉偟偰傒傑偟偨丅懍搙偼40MHz偱偡丅
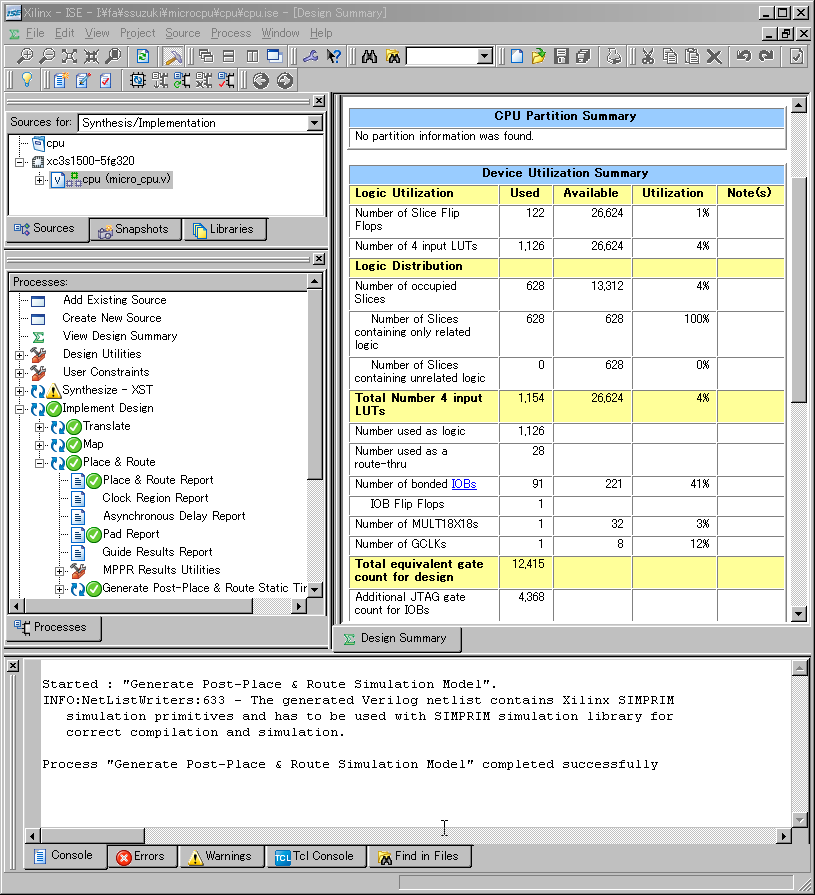
抶墑僔儈儏儗乕僔儑儞偱偡丅Stratix嘦偲斾傋傞偲傗偼傝抶墑偼戝偒偔側傝傑偡丅
僔儞僋儘僫僗ROM偺幚憰
尰嵼偺FPGA偺RAM/ROM偼丄僋儘僢僋偵摨婜偟偰摦嶌偡傞僞僀僾偑庡棳偱偡偺偱丄崱傑偱偺RTL丂SIM偐傜偦偺曈傪廋惓偡傞昁梫偑偁傝傑偡丅
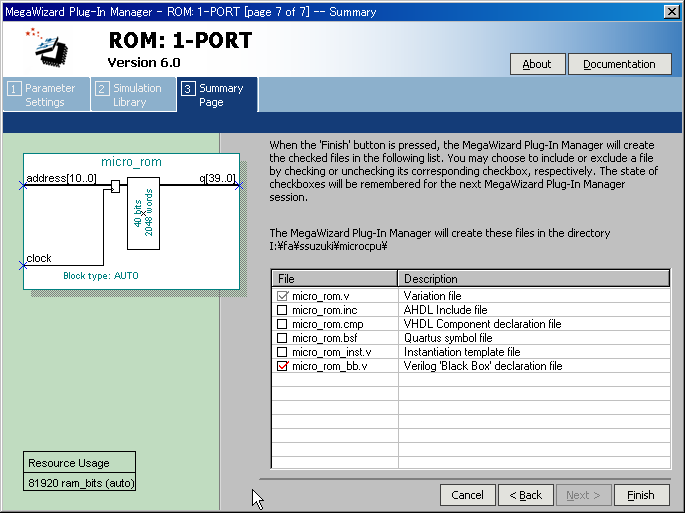
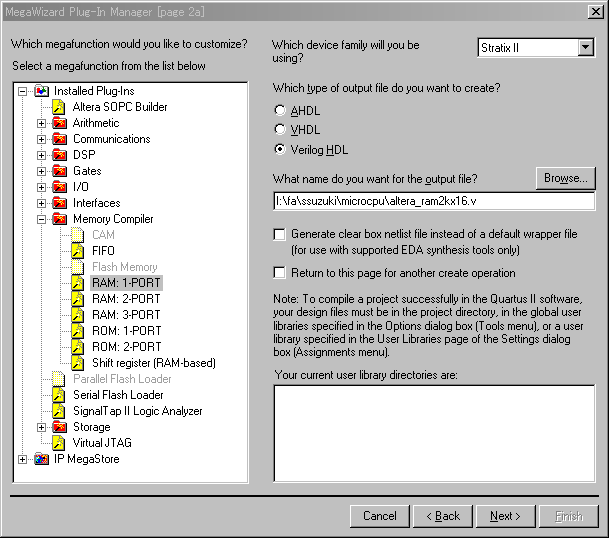
Altera偺ROM嶌惉
Mega亅Wizard偱惗惉偟傑偡丅
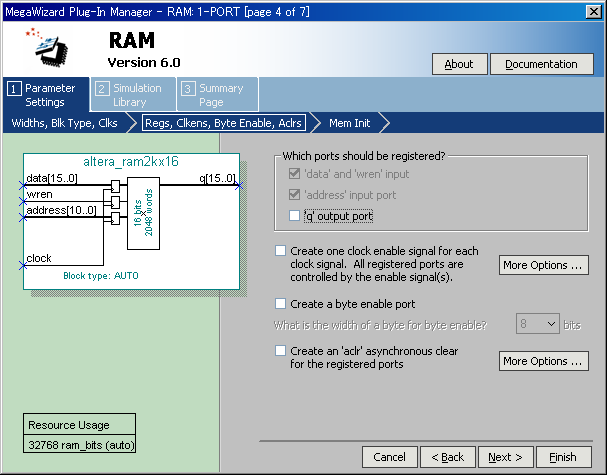
壓偺傛偆偵丄address_latach偑default 偱晅偄偰偟傑偄傑偡丅偙偺懳墳偵偮偄偰偼屻弎偟傑偡丅
價僢僩暆偼丄40價僢僩丄儚乕僪悢偼丄偲傝偁偊偢尰幚揑側抣偲偟偰俀K儚乕僪傪巜掕偟傑偡丅
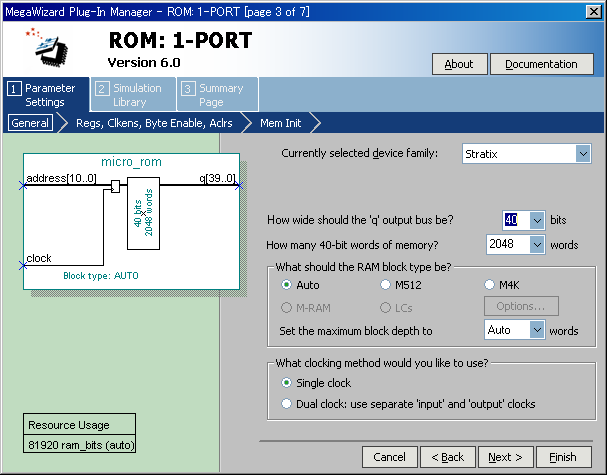
屻抜偺弌椡偼丄儗僕僗僞側偟偵偟傑偡丅
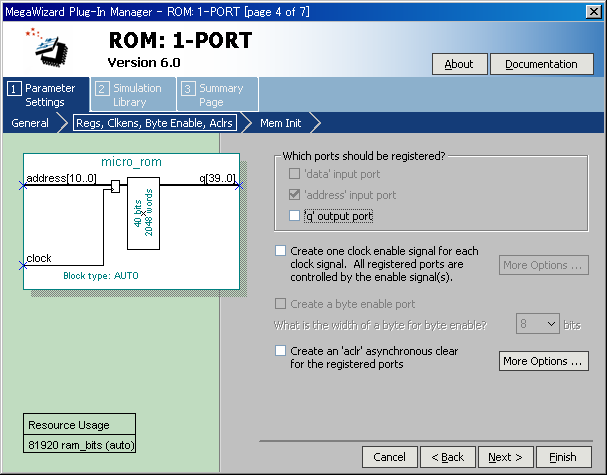
ROM偺弶婜壔偼丄hex僼傽僀儖傪巜掕偟傑偡丅乮hex僼傽僀儖偼屻弎乯
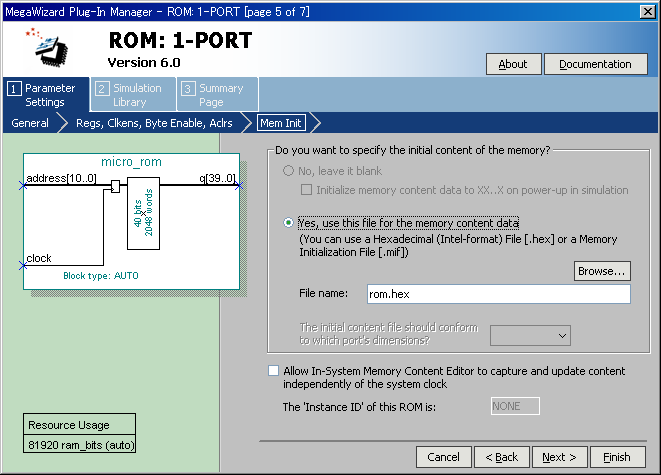
埲忋偱丄Wizard廔椆偱偡丅
偝偰丄栤戣偼丄僾儘僌儔儉僇僂儞僞PC偲RAM撪偺傾僪儗僗儔僢僠摦嶌偑僟僽偭偰偄傞偙偲偱偡丅僞僟偱侾CLK抶傟偰偟傑偆偺偱柺敀偔偁傝傑偣傫丅偦偙偱丄ROM偵搉偡PC偼丄儗僕僗僞弌椡偱偼側偔丄慻傒崌傢偣夞楬偺傑傑丄ROM偵搉偟傑偡丅
Xilinx斉傕摨條偱丄pc_com傪搉偟傑偡丅
// ROM
`ifdef ALTERA
micro_rom rom(.address(pc_com),.q(rom_data),.clock(clock));//ROM 偵偼pc偱偼側偔pc_com傪搉偡宍偵曄峏
`else
`ifdef XILINX
micro_rom_xilinx rom(.addr(pc_com),.dout(rom_data),.clk(clock));//ROM 偵偼pc偱偼側偔pc_com傪搉偡宍偵曄峏
`else
rom rom(.rom_address(pc_com),.Data(rom_data),.clock(clock));//ROM 偵偼pc偱偼側偔pc_com傪搉偡宍偵曄峏
`endif
`endif
pc_com偼丄儗僕僗僞pc偵偡傞慜偺慻傒崌傢偣夞楬偱丄埲壓偺傛偆偵側傝傑偡丅
偙偙偱丄pc_com偼丄clock偵懳偟偰摨婜偟偨怣崋偺傒偱峔惉偡傞偙偲偵拲堄偟傑偡丅FPGA撪晹偼丄旕摨婜儕僙僢僩偺FF傪彍偒丄慡晹摨婜偟偨怣崋偱峔惉偡傞偙偲偑廳梫偱偡丅reset偼丄旕摨婜側偺偱丄clock偱丄摨婜壔偟偨怣崋偵偟傑偡丅
// 儅僀僋儘僾儘僌儔儉僇僂儞僞
reg reset_sync;
always @(clock) reset_sync<=reset;//摨婜壔 pc慻傒崌傢偣夞楬偼丄摨婜壔偟偨傕偺偑昁梫
//pc 慻傒崌傢偣夞楬
//Altera sync rom 偼丄昁偢Address儔僢僠偑偮偄偰偟傑偆偺偱丄
//pc傪搉偟偰偟傑偆偺偼丄侾CLK丂DELAY偵側偭偰偟傑偆丅偦傟傪杊偖
//偨傔偵師傾僪儗僗傪慻傒崌傢偣夞楬偱搉偡丅儊儌儕撪儔僢僠偼PC偲Duplicate摦嶌偡傞
reg [15:0] pc_com;
always @* begin
if(reset_sync)
begin
pc_com= 0;
end
// 僕儍儞僾柦椷張棟
else if(command==`JMP_com && alu_data[0]==1'b1)
begin
//旘傫偱偄偗
pc_com= immediate_data;
end
else if(command==`SYNC_com)
begin //摨婜懸偪僗僞乕僩張棟
if(sync_pos_edge_detected)
begin
//摨婜怣崋傪専弌丅師偺傾僪儗僗傪幚峴奐巒丅
pc_com= pc + 1;
end
else
begin
//摨婜僄僢僕偑棃傞傑偱懸偮
pc_com= pc;
end
end
else if(loop_flag)
begin //儖乕僾張棟
if(Reset_loop_counter)
begin
//儖乕僾張棟偐傜敳偗傞
pc_com= pc + 1;
end
else
begin
//僟僂儞僇僂儞僩拞偼懸偮
pc_com= pc;
end
end
else
begin
// 壗傕側偄帪偼師偺傾僪儗僗傪幚峴奐巒
pc_com= pc + 1;
end
end
always @(posedge clock, posedge reset) begin
if(reset)
begin
pc <= 0;
end
else pc<=pc_com;
end
偙偺傛偆偵偡傟偽丄RAM撪偺傾僪儗僗儔僢僠偼丄PC偺傛偆偵怳傞傑偆偺偱丄崱傑偱偺RTL丂SIM偲摨偠僞僀儈儞僌偱摦嶌偡傞偙偲偵側傝傑偡丅
Xilinx偺ROM
coregen偱丄1億乕僩ROM傪惗惉偟傑偡丅
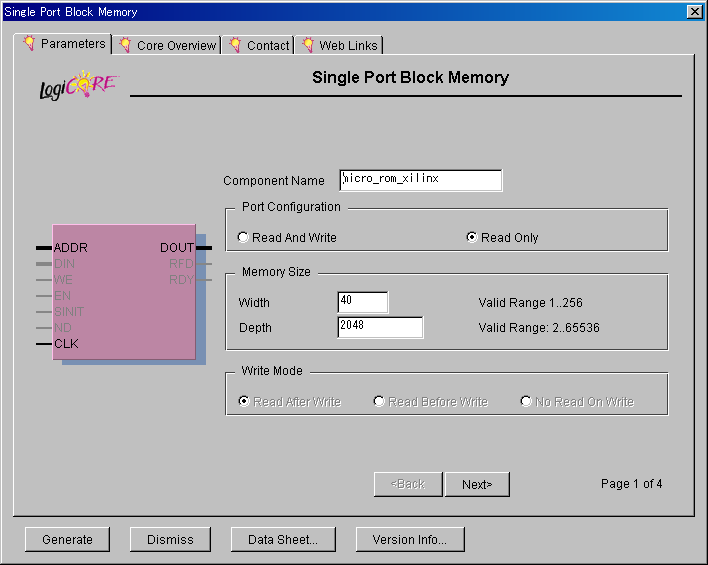
側偵傕巜掕偣偢偵恑傒傑偡丅
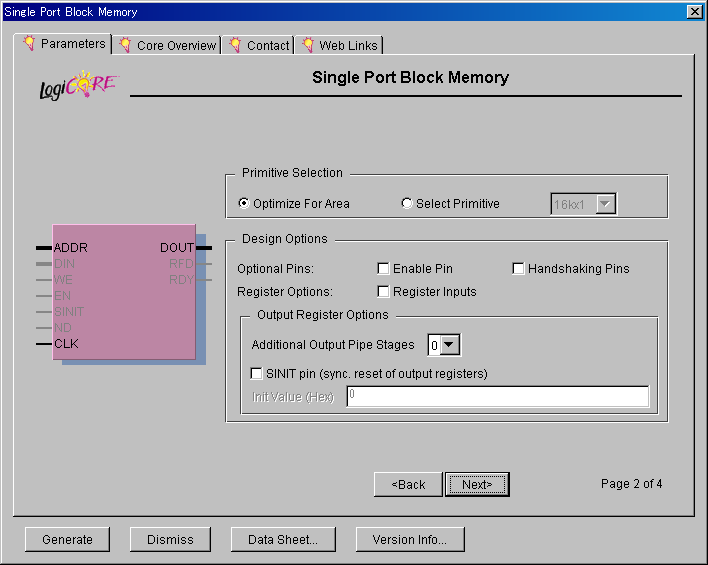
ROM偺弶婜壔僼傽僀儖偼丄rom.coe乮屻弎乯傪巜掕偟傑偡丅
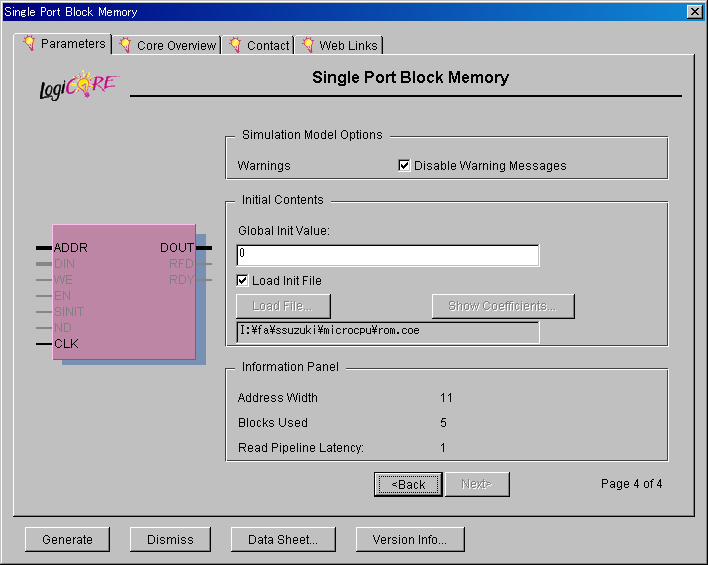
ROM弶婜壔僼傽僀儖偺惗惉
Altera丄Xilinx嫟愱梡偺弶婜壔僼傽僀儖偑昁梫偵側傝傑偡丅偙傟偐傜愭丄偄偪偄偪懠偺僣乕儖偱曄姺偡傞偺偼丄柺搢側偺偱丄Verilog丂HDL僜乕僗拞丄RTL丂SIM帪偵帺摦惗惉偡傞傛偆偵偟傑偡丅
HEX僼傽僀儖偺惗惉僞僗僋偱偡丅micro_rom偺撪梕傪INTEL丂HEX僼傽僀儖(rom.hex乯偵偡傞僞僗僋偱偡丅
//memory 偺撪梕傪Altera丂ROM弶婜壔梡偵
//intel-hex僼僅乕儅僢僩偵曄姺偡傞
//僼傽僀儖->rom.hex 偲偟偰弌椡偡傞
//address 64K word max
//zx傪娷傑側偄偙偲
task make_intel_hex(input [7:0] bytes_per_word,
input integer address_max);
reg [9*8:1] str;
integer fi;
reg [15:0] ad;
integer bytes;
reg [7:0] parity;
begin
fi=$fopen("rom.hex","w");
for (ad=0;ad <=address_max;ad=ad+1) begin
$sformat(str,":%2h%4h00",bytes_per_word,ad);
parity=bytes_per_word;
parity =parity + ad[8*1 +:8];//僠僃僢僋僒儉
parity =parity + ad[0 +:8];//僠僃僢僋僒儉
$fwrite(fi,"%s",str);
for (bytes=0;bytes<bytes_per_word;bytes=bytes+1) begin: byte_loop
reg [7:0] byte;
byte=micro_rom[ad][(bytes_per_word-1-bytes)*8 +:8];
parity=parity+byte;//僠僃僢僋僒儉
$fwrite(fi,"%2h",byte);
end
parity=~parity +8'h01;//僠僃僢僋僒儉
$fwrite(fi,"%2h",parity);
$fwrite(fi,"\n");
end
$fdisplay(fi,":00000001FF");
$fclose(fi);
str="rom.ver";
//$convert_hex2ver("rom.hex",40,str);//僠僃僢僋Veritak丂Unique僼傽儞僋僔儑儞
end
endtask
micro_rom偺撪梕傪XILINX丂Coe僼傽僀儖偵偡傞僞僗僋偱偡丅
//xilinx coe file
task make_coe_file(input [7:0] bytes_per_word,
input integer address_max);
integer fi;
integer ad;
begin
fi=$fopen("rom.coe","w");
$fdisplay(fi,"memory_initialization_radix=16;");
$fdisplay(fi,"memory_initialization_vector=");
for (ad=0;ad <address_max;ad=ad+1) begin
$fdisplay(fi,"%h,",micro_rom[ad]);
end
$fdisplay(fi,"%h;",micro_rom[address_max]);
$fclose(fi);
end
endtask
埲忋偺僞僗僋傪RTL丂SIM帪偵惗惉偡傞傛偆偵偟傑偡丅
// 儅僀僋儘僐乕僪
`define PHY_ADD_MAX (1024*2-1)
//ALTERA丂ROM偺柾媅僐乕僪
reg [39:0] micro_rom [0:`PHY_ADD_MAX];
reg [15:0] address_latch;
always @(posedge clock) address_latch<=rom_address;
// always @(posedge clock ) begin//q latch 弌椡晅偺応崌丄彨棃僷僀僾儔僀儞壔偟偨偲偒偵昁梫偵側傞丅
always @* begin
Data=micro_rom[address_latch];
end
`ifdef RTL_SIM
integer i;
initial begin
for (i=0;i<= `PHY_ADD_MAX;i=i+1) begin
micro_rom[i]=romdata(i);
end
make_intel_hex(5,`PHY_ADD_MAX);//RTL SIM帪偵INTEL丂HEX僼傽僀儖傪惗惉偡傞 Altera 梡
make_coe_file(5,`PHY_ADD_MAX);//RTL SIM帪偵Xilinx梡丂Coe僼傽僀儖傪惗惉偡傞
end
`endif
埲忋偱丄僔儞僋儘僫僗ROM幚憰傊偺曄峏偑廔傢傝傑偟偨丅
XILINX,ALTERA偺愗傝懼偊偼丄朻摢偺Define偺掕媊偺桳柍偱偡丅RTL丂僔儈儏儗乕僔儑儞偺応崌偼丄Veritak丂Project偵Define傪擖傟崬傔偽巜掕偟側偔偰傕傛偄偺偱偡偑丄崌惉偡傞応崌偼丄偦傟偧傟掕媊傪曄偊傑偡丅
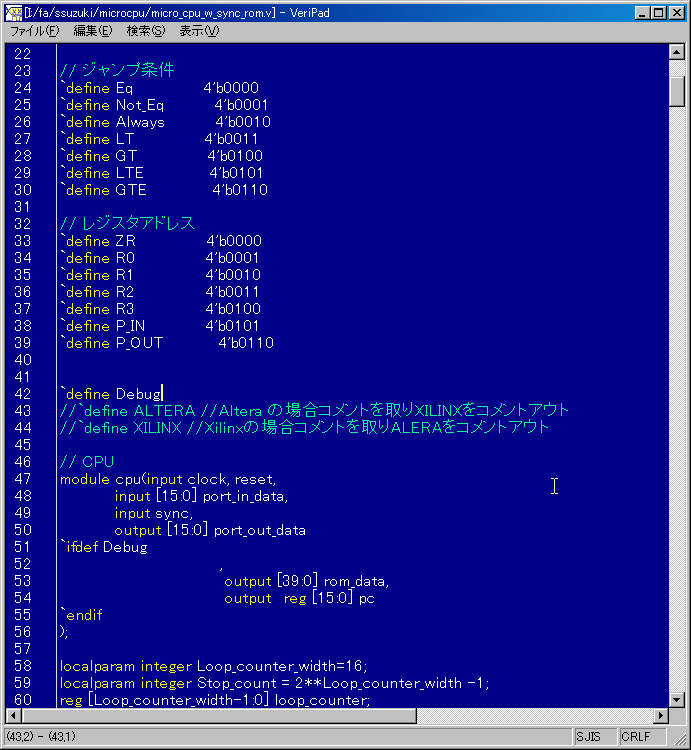
崱夞偺慡懱僜乕僗偱偡丅
// 儅僀僋儘僾儘僌儔儉曽幃 CPU
// 僱僀僥傿僽僐儅儞僪
`define ADD_com 5'b00000
`define SET_com 5'b00001
`define SUB_com 5'b00010
`define SHIFT_L_com 5'b00011
`define SHIFT_R_com 5'b00100
`define JMP_com 5'b00101
`define SYNC_com 5'b00110
`define AND_com 5'b00111
`define OR_com 5'b01000
`define XOR_com 5'b01001
`define NOT_com 5'b01010
`define MUL_com 5'b01011
`define BSHIFT_L_com 5'b01100
`define BSHIFT_R_com 5'b01101
// 僕儍儞僾忦審
`define Eq 4'b0000
`define Not_Eq 4'b0001
`define Always 4'b0010
`define LT 4'b0011
`define GT 4'b0100
`define LTE 4'b0101
`define GTE 4'b0110
// 儗僕僗僞傾僪儗僗
`define ZR 4'b0000
`define R0 4'b0001
`define R1 4'b0010
`define R2 4'b0011
`define R3 4'b0100
`define P_IN 4'b0101
`define P_OUT 4'b0110
`define Debug
//`define ALTERA //Altera 偺応崌僐儊儞僩傪庢傝XILINX傪僐儊儞僩傾僂僩
//`define XILINX //Xilinx偺応崌僐儊儞僩傪庢傝ALERA傪僐儊儞僩傾僂僩
// CPU
module cpu(input clock, reset,
input [15:0] port_in_data,
input sync,
output [15:0] port_out_data
`ifdef Debug
,
output [39:0] rom_data,
output reg [15:0] pc
`endif
);
localparam integer Loop_counter_width=16;
localparam integer Stop_count = 2**Loop_counter_width -1;
reg [Loop_counter_width-1:0] loop_counter;
`ifndef Debug
reg [15:0] pc;
reg [15:0] pc_com;//慻傒崌傢偣儘僕僢僋
`endif
// reg [15:0] port_in_reg;
reg sync_ff, sync_ff2;
/*----------------------------------------------------------------------------
ROM儚僀儎乕儅僢僾
價僢僩埵抲 價僢僩暆 撪梕
39:35 5 柦椷
34:31 4 儗僕僗僞僼傽僀儖A億乕僩偺傾僪儗僗
30:27 4 儗僕僗僞僼傽僀儖B億乕僩偺傾僪儗僗
26:23 4 儗僕僗僞僼傽僀儖儔僀僩億乕僩偺傾僪儗僗
22:19 4 僕儍儞僾斾妑忦審
18:16 3 彨棃奼挘梡
16:16 1 loop_flag 儖乕僾張棟偡傞偐偳偆偐偺僼儔僌丄侾偱儖乕僾張棟
15:0 16 懄抣傑偨偼丄旘傃愭
-----------------------------------------------------------------------------*/
`ifndef Debug
wire [39:0] rom_data;
`endif
wire [4:0] command = rom_data[39:35];
wire [3:0] A_address = rom_data[34:31];
wire [3:0] B_address = rom_data[30:27];
wire [3:0] write_address = rom_data[26:23];
wire [3:0] jump_cond = rom_data[22:19];
wire [2:0] reserved = rom_data[18:16];
wire [15:0] immediate_data = rom_data[15:0];
wire loop_flag = reserved[0];
wire [15:0] out_dataA, out_dataB;
wire [15:0] alu_data;
// SET僐儅儞僪偺帪偼丄"A億乕僩偵戙擖偡傞抣" 傪愙懕偡傞丅
// 仸 ALU偱 僛儘儗僕僗僞偲壛嶼偟偰戙擖偡傞帠偱丄SET傪幚尰偡傞堊丅
wire [15:0] Aport_data = (command==`SET_com) ? immediate_data : port_in_data;
//儖乕僾僇僂儞僞儕僙僢僩忦審
wire Reset_loop_counter = (loop_counter<2)||
(loop_counter==Stop_count && immediate_data == 16'b0)
? 1 : 0;
//儖乕僾僇僂儞僞偺張棟
always @(posedge clock, posedge reset) begin
if(reset)
begin
loop_counter <= Stop_count;
end
else if(Reset_loop_counter)
begin
loop_counter <= Stop_count;
end
else if(loop_flag && loop_counter==Stop_count)
begin
// 儖乕僾僇僂儞僩抣傪僙僢僩
loop_counter <= immediate_data;
end
//else if ((loop_flag) && (loop_counter>1))
else if(loop_flag)
begin
// 儖乕僾張棟
loop_counter <= loop_counter - 16'b1;
end
else
begin
loop_counter <= Stop_count;
end
end
// 擖椡摨婜僄僢僕専弌
always @(posedge clock, posedge reset) begin
if (reset) sync_ff<=0;
else sync_ff<=sync;
end
always @(posedge clock, posedge reset) begin
if (reset) sync_ff2<=0;
else sync_ff2<=sync_ff;
end
// 棫偪忋偑傝僄僢僕傪専弌
wire sync_pos_edge_detected = sync_ff & ~sync_ff2;
// 儅僀僋儘僾儘僌儔儉僇僂儞僞
reg reset_sync;
always @(clock) reset_sync<=reset;//摨婜壔 pc慻傒崌傢偣夞楬偼丄摨婜壔偟偨傕偺偑昁梫
//pc 慻傒崌傢偣夞楬
//Altera sync rom 偼丄昁偢Address儔僢僠偑偮偄偰偟傑偆偺偱丄
//pc傪搉偟偰偟傑偆偺偼丄侾CLK丂DELAY偵側偭偰偟傑偆丅偦傟傪杊偖
//偨傔偵師傾僪儗僗傪慻傒崌傢偣夞楬偱搉偡丅儊儌儕撪儔僢僠偼PC偲Duplicate摦嶌偡傞
reg [15:0] pc_com;
always @* begin
if(reset_sync)
begin
pc_com= 0;
end
// 僕儍儞僾柦椷張棟
else if(command==`JMP_com && alu_data[0]==1'b1)
begin
//旘傫偱偄偗
pc_com= immediate_data;
end
else if(command==`SYNC_com)
begin //摨婜懸偪僗僞乕僩張棟
if(sync_pos_edge_detected)
begin
//摨婜怣崋傪専弌丅師偺傾僪儗僗傪幚峴奐巒丅
pc_com= pc + 1;
end
else
begin
//摨婜僄僢僕偑棃傞傑偱懸偮
pc_com= pc;
end
end
else if(loop_flag)
begin //儖乕僾張棟
if(Reset_loop_counter)
begin
//儖乕僾張棟偐傜敳偗傞
pc_com= pc + 1;
end
else
begin
//僟僂儞僇僂儞僩拞偼懸偮
pc_com= pc;
end
end
else
begin
// 壗傕側偄帪偼師偺傾僪儗僗傪幚峴奐巒
pc_com= pc + 1;
end
end
always @(posedge clock, posedge reset) begin
if(reset)
begin
pc <= 0;
end
else pc<=pc_com;
end
// 儗僕僗僞僼傽僀儖
register_file register_file(.clock(clock),
.reset(reset),
.A_address(A_address),
.B_address(B_address),
.write_address(write_address),
.alu_data(alu_data),
.out_dataA(out_dataA),
.out_dataB(out_dataB),
.port_in_data(Aport_data),
.port_out_data(port_out_data));
// ALU
alu alu(.command(command),
.jump_cond(jump_cond),
.portA(out_dataA),
.portB(out_dataB),
.alu_out(alu_data));
// ROM
`ifdef ALTERA
micro_rom rom(.address(pc_com),.q(rom_data),.clock(clock));//ROM 偵偼pc偱偼側偔pc_com傪搉偡宍偵曄峏
`else
`ifdef XILINX
micro_rom_xilinx rom(.addr(pc_com),.dout(rom_data),.clk(clock));//ROM 偵偼pc偱偼側偔pc_com傪搉偡宍偵曄峏
`else
rom rom(.rom_address(pc_com),.Data(rom_data),.clock(clock));//ROM 偵偼pc偱偼側偔pc_com傪搉偡宍偵曄峏
`endif
`endif
endmodule
// 儗僕僗僞僼傽僀儖
// 婰壇慺巕傪儗僕僗僞偺廤傑傝偲偟偰丄傑偲傔偰儌僕儏乕儖壔丅
// 摨帪偵撉傒彂偒偱偒傞億乕僩偑俁偮
// 儔僀僩億乕僩偑侾偮丄儕乕僪億乕僩偑俀偮丅
module register_file(input clock,
input reset,
input [3:0] A_address,
input [3:0] B_address,
input [3:0] write_address,
input [15:0] alu_data, port_in_data,
output [15:0] out_dataA, out_dataB, port_out_data);
// CPU儗僕僗僞
reg [15:0] p_out_reg, r0, r1, r2, r3;
// 億乕僩傾僂僩儗僕僗僞
always @(posedge clock, posedge reset) begin
if(reset)
begin
p_out_reg <= 0;
end
else if(write_address == `P_OUT)
begin
p_out_reg <= alu_data;
end
else
begin
p_out_reg <= p_out_reg;
end
end
// 斈梡儗僕僗僞R0
always @(posedge clock, posedge reset) begin
if(reset)
begin
r0 <= 0;
end
else if(write_address == `R0)
begin
r0 <= alu_data;
end
else
begin
r0 <= r0;
end
end
// 斈梡儗僕僗僞R1
always @(posedge clock, posedge reset) begin
if(reset)
begin
r1 <= 0;
end
else if(write_address == `R1)
begin
r1 <= alu_data;
end
else
begin
r1 <= r1;
end
end
// 斈梡儗僕僗僞R2
always @(posedge clock, posedge reset) begin
if(reset)
begin
r2 <= 0;
end
else if(write_address == `R2)
begin
r2 <= alu_data;
end
else
begin
r2 <= r2;
end
end
// 斈梡儗僕僗僞R3
always @(posedge clock, posedge reset) begin
if(reset)
begin
r3 <= 0;
end
else if(write_address == `R3)
begin
r3 <= alu_data;
end
else
begin
r3 <= r3;
end
end
// A億乕僩弌椡(ALU傊)
assign out_dataA = (A_address==`P_OUT) ? p_out_reg :
(A_address==`P_IN) ? port_in_data :
(A_address==`R0) ? r0 :
(A_address==`R1) ? r1 :
(A_address==`R2) ? r2 :
(A_address==`R3) ? r3 : 16'b0;
// B億乕僩弌椡(ALU傊)
assign out_dataB = (B_address==`P_OUT) ? p_out_reg :
(B_address==`P_IN) ? port_in_data :
(B_address==`R0) ? r0 :
(B_address==`R1) ? r1 :
(B_address==`R2) ? r2 :
(B_address==`R3) ? r3 : 16'b0;
// 弌椡億乕僩(偦偺傑傑弌椡)
assign port_out_data = p_out_reg;
endmodule
// ALU
module alu(input [4:0] command,
input [3:0] jump_cond,
input [15:0] portA,portB,
output reg [15:0] alu_out);
always @(*) begin
case (command)
`ADD_com: alu_out=portA+portB;
`SUB_com: alu_out=portA-portB;
`SHIFT_L_com: alu_out=portB << 1;
`SHIFT_R_com: alu_out=portB >> 1;
`BSHIFT_L_com:alu_out=portA << portB;
`BSHIFT_R_com:alu_out=portA >> portB;
`MUL_com: alu_out=portA * portB;
`AND_com: alu_out=portA & portB;
`OR_com: alu_out=portA | portB;
`XOR_com: alu_out=portA ^ portB;
`NOT_com: alu_out=~portA;
`JMP_com:
case (jump_cond)
`Eq: alu_out=(portA == portB);
`Not_Eq: alu_out=(portA != portB);
`Always: alu_out=1;
`LT: if (portA < portB)
alu_out=1;
else
alu_out=0;
`GT: if (portA > portB)
alu_out=1;
else
alu_out=0;
`LTE: if (portA <= portB)
alu_out=1;
else
alu_out=0;
`GTE: if (portA >= portB)
alu_out=1;
else
alu_out=0;
default: alu_out=0;
endcase
default: alu_out=portA+portB;
endcase
end
endmodule
module rom(input [15:0] rom_address,
input clock,//僔儞僋儘僫僗ROM偵曄峏
output reg [39:0] Data);
//assign Data = romdata(rom_address);//僔儞僋儘僫僗ROM偵曄峏
//TAK start
wire [4:0] command = Data[39:35];
wire [3:0] A_address = Data[34:31];
wire [3:0] B_address = Data[30:27];
wire [3:0] write_address = Data[26:23];
wire [3:0] jump_cond = Data[22:19];
wire [15:0] im_val=Data[15:0];
wire [2:0] loop_cond=Data[18:16];
//TAK end
// 僐儅儞僪
parameter [4:0] Set=`SET_com,
Add=`ADD_com,
Sub=`SUB_com,
Shift_L=`SHIFT_L_com,
Shift_R=`SHIFT_R_com,
Jmp=`JMP_com,
Sync=`SYNC_com,
Mul=`MUL_com,
And=`AND_com,
Or =`OR_com,
Xor=`XOR_com,
Not=`NOT_com,
BShift_L=`BSHIFT_L_com,
BShift_R=`BSHIFT_R_com;
parameter [4:0] \僙僢僩 =`SET_com,
\壛嶼 =`ADD_com,
\尭嶼 =`SUB_com,
\嵍僔僼僩 =`SHIFT_L_com,
\塃僔僼僩 =`SHIFT_R_com,
\僕儍儞僾 =`JMP_com,
\僔儞僋柦椷 =`SYNC_com,
\忔嶼 =`MUL_com,
\仌 =`AND_com,
\OR =`OR_com,
\XOR =`XOR_com,
\NOT =`NOT_com,
\嵍僶儗儖僔僼僩 =`BSHIFT_L_com,
\塃僶儗儖僔僼僩 =`BSHIFT_R_com;
// 儗僕僗僞傾僪儗僗
parameter [3:0] P_OUT=`P_OUT,//IO億乕僩弌椡
P_IN=`P_IN, //IO億乕僩擖椡
R0= `R0,
R1= `R1,
R2= `R2,
R3= `R3,
ZR= `ZR; // 僛儘儗僕僗僞 (= 僛儘GND)
// 僕儍儞僾忦審
parameter [3:0] Eq=`Eq,
Not_Eq=`Not_Eq,
Always=`Always,
LT=`LT,
GT=`GT,
LTE=`LTE,
GTE=`GTE;
// 儖乕僾張棟
parameter [2:0] Reserved = 3'b000,
LoopEnabled = 3'b001;
// 儅僋儘柦椷
// NOP
`define NOP romdata={Add,ZR,ZR,ZR,Eq,Reserved,16'h 0000}
// 僐僺乕 : r0 仺 r1
`define MOV(r0,r1) romdata={Add,r0,ZR,r1,Eq,Reserved,16'h 0000}
// 僋儕傾 : r0 = 0
`define CLR(r0) romdata={Add,ZR,ZR,r0,Eq,Reserved,16'h 0000}
// 掕悢戙擖 : r0 = num
`define SET(r0,num) romdata={Set,P_IN,ZR,r0,Eq,Reserved,16'd num}
// 僕儍儞僾
`define JUMP(num) romdata={Jmp,ZR,ZR,ZR,Always,Reserved,16'd num}
// 榑棟斀揮
`define NOT(r0,r1) romdata={Not,r0,ZR,r1,Always,Reserved,16'h 0000}
// 懌偟嶼 : r2 = r0 + r1
`define ADD(r0,r1,r2) romdata={Add,r0,r1,r2,Eq,Reserved,16'h 0000}
// 堷偒嶼 : r2 = r0 - r1
`define SUB(r0,r1,r2) romdata={Sub,r0,r1,r2,Eq,Reserved,16'h 0000}
// 忔嶼 : r2 = r0 * r1
`define MUL(r0,r1,r2) romdata={Mul,r0,r1,r2,Eq,Reserved,16'h 0000}
// 忦審暥 : if(r0<r1) goto num;
`define JUMP_IF_LT(r0,r1,num) romdata={Jmp,r0,r1,ZR,LT,Reserved,16'd num}
// 忦審暥 : if(r0>r1) goto num;
`define JUMP_IF_GT(r0,r1,num) romdata={Jmp,r0,r1,ZR,GT,Reserved,16'd num}
// 忦審暥 : if(r0<=r1) goto num;
`define JUMP_IF_LTE(r0,r1,num) romdata={Jmp,r0,r1,ZR,LTE,Reserved,16'd num}
// 忦審暥 : if(r0>=r1) goto num;
`define JUMP_IF_GTE(r0,r1,num) romdata={Jmp,r0,r1,ZR,GTE,Reserved,16'd num}
// 忦審暥 : if(r0==r1) goto num;
`define JUMP_IF_EQ(r0,r1,num) romdata={Jmp,r0,r1,ZR,Eq,Reserved,16'd num}
// 1價僢僩僔僼僩
`define SHIFT_L(r0,r1) romdata={Shift_L,ZR,r0,r1,Eq,Reserved,16'h 0000}
`define SHIFT_R(r0,r1) romdata={Shift_R,ZR,r0,r1,Eq,Reserved,16'h 0000}
// 僶儗儖僔僼僩
`define BSHIFT_L(r0,r1,r2) romdata={BShift_L,r0,r1,r2,Eq,Reserved,16'h 0000}
`define BSHIFT_R(r0,r1,r2) romdata={BShift_R,r0,r1,r2,Eq,Reserved,16'h 0000}
// 奜晹擖椡丒棫偪忋偑傝僄僢僕傑偱懸偮
`define SYNC romdata={Sync,ZR,ZR,ZR,Eq,Reserved,16'h 0000}
// 儖乕僾孞傝曉偟柦椷(JUMP柦椷暘偺1僋儘僢僋傪愡栺)
// ex : r2 = r0 + r1 傪 num+1 夞孞傝曉偡丅偦偺娫丄pc 偼 尰傾僪儗僗偱懸婡丅
`define ADD_LOOP(r0,r1,r2,num) romdata={Add,r0,r1,r2,Eq,LoopEnabled,16'd num}
`define SUB_LOOP(r0,r1,r2,num) romdata={Sub,r0,r1,r2,Eq,LoopEnabled,16'd num}
`define MUL_LOOP(r0,r1,r2,num) romdata={Mul,r0,r1,r2,Eq,LoopEnabled,16'd num}
`define SHIFT_L_LOOP(r0,num) romdata={Shift_L,ZR,r0,r0,Eq,LoopEnabled,16'd num}
`define SHIFT_R_LOOP(r0,num) romdata={Shift_R,ZR,r0,r0,Eq,LoopEnabled,16'd num}
//Tak start 丂媡傾僙儞僽儔
reg [8*40:1] str;
function [8*3:1] get_rn(input [3:0] addr);
case (addr)
P_OUT: get_rn="OUT";
P_IN: get_rn="IN"; //IO億乕僩擖椡
R0: get_rn="R0";
R1: get_rn="R1";
R2: get_rn="R2";
R3: get_rn="R3";
ZR: get_rn="ZR"; // 僛儘儗僕僗僞 (= 僛儘GND)
default: get_rn="???";
endcase
endfunction
always @* begin
case (command)
Add:
if(loop_cond==0) begin
if (A_address==ZR && B_address==ZR & write_address==ZR) $sformat(str,"NOP");
else if (B_address==ZR && A_address==ZR ) $sformat(str,"%s傪僋儕傾",get_rn(write_address));
else if (B_address==ZR ) $sformat(str,"%s偐傜%s傊僐僺乕",get_rn(A_address),get_rn(write_address));
else $sformat(str,"%s=%s + %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
end else begin
if (A_address==ZR && B_address==ZR & write_address==ZR) $sformat(str,"NOP %d儖乕僾晅",im_val);
else if (B_address==ZR && A_address==ZR ) $sformat(str,"%s傪僋儕傾丂 %d儖乕僾晅",get_rn(write_address),im_val);
else if (B_address==ZR ) $sformat(str,"%s偐傜%s傊僐僺乕丂 %d儖乕僾晅",get_rn(A_address),get_rn(write_address),im_val);
else $sformat(str,"%s=%s + %s %d儖乕僾晅",get_rn(write_address),get_rn(A_address),get_rn(B_address),im_val);
end
Set: $sformat(str,"%s=%h[Hex]",get_rn(write_address),im_val);
Mul:
if (loop_cond==0) begin
$sformat(str,"%s=%s * %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
end else $sformat(str,"%s=%s * %s 丂 %d儖乕僾晅",get_rn(write_address),get_rn(A_address),get_rn(B_address),im_val);
Sub:
if (loop_cond==0) begin
$sformat(str,"%s=%s - %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
end else $sformat(str,"%s=%s - %s %d儖乕僾晅",get_rn(write_address),get_rn(A_address),get_rn(B_address),im_val);
Sync:
$sformat(str,"僔儞僋柦椷");
Not: $sformat(str,"%s=~%s",get_rn(write_address),get_rn(A_address));
Jmp:
if (jump_cond==Always) $sformat(str,"%d斣抧傊僕儍儞僾",im_val);
else if (jump_cond==LT) $sformat(str,"%s < %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==GT) $sformat(str,"%s > %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==LTE) $sformat(str,"%s <= %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==GTE) $sformat(str,"%s >= %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
else if (jump_cond==Eq) $sformat(str,"%s == %s 側傜%d斣抧傊僕儍儞僾",get_rn(A_address),get_rn(B_address),im_val);
Shift_L:
if (loop_cond==0) $sformat(str,"%s=%s << 1",get_rn(write_address),get_rn(B_address));
else $sformat(str,"%s=%s << %d",get_rn(write_address),get_rn(B_address),im_val);
Shift_R:
if (loop_cond==0) $sformat(str,"%s=%s >> 1",get_rn(write_address),get_rn(B_address));
else $sformat(str,"%s=%s >> %d",get_rn(write_address),get_rn(B_address),im_val);
BShift_L:
$sformat(str,"%s=%s <<%s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
BShift_R:
$sformat(str,"%s=%s >> %s",get_rn(write_address),get_rn(A_address),get_rn(B_address));
endcase
end
//Tak end
// 儅僀僋儘僐乕僪
`define PHY_ADD_MAX (1024*2-1)
//ALTERA丂ROM偺柾媅僐乕僪
reg [39:0] micro_rom [0:`PHY_ADD_MAX];
reg [15:0] address_latch;
always @(posedge clock) address_latch<=rom_address;
// always @(posedge clock ) begin//q latch 弌椡晅偺応崌丄彨棃僷僀僾儔僀儞壔偟偨偲偒偵昁梫偵側傞丅
always @* begin
Data=micro_rom[address_latch];
end
`ifdef RTL_SIM
integer i;
initial begin
for (i=0;i<= `PHY_ADD_MAX;i=i+1) begin
micro_rom[i]=romdata(i);
end
make_intel_hex(5,`PHY_ADD_MAX);//RTL SIM帪偵INTEL丂HEX僼傽僀儖傪惗惉偡傞 Altera 梡
make_coe_file(5,`PHY_ADD_MAX);//RTL SIM帪偵Xilinx梡丂Coe僼傽僀儖傪惗惉偡傞
end
`endif
//memory 偺撪梕傪Altera丂ROM弶婜壔梡偵
//intel-hex僼僅乕儅僢僩偵曄姺偡傞
//僼傽僀儖->rom.hex 偲偟偰弌椡偡傞
//address 64K word max
//zx傪娷傑側偄偙偲
task make_intel_hex(input [7:0] bytes_per_word,
input integer address_max);
reg [9*8:1] str;
integer fi;
reg [15:0] ad;
integer bytes;
reg [7:0] parity;
begin
fi=$fopen("rom.hex","w");
for (ad=0;ad <=address_max;ad=ad+1) begin
$sformat(str,":%2h%4h00",bytes_per_word,ad);
parity=bytes_per_word;
parity =parity + ad[8*1 +:8];//僠僃僢僋僒儉
parity =parity + ad[0 +:8];//僠僃僢僋僒儉
$fwrite(fi,"%s",str);
for (bytes=0;bytes<bytes_per_word;bytes=bytes+1) begin: byte_loop
reg [7:0] byte;
byte=micro_rom[ad][(bytes_per_word-1-bytes)*8 +:8];
parity=parity+byte;//僠僃僢僋僒儉
$fwrite(fi,"%2h",byte);
end
parity=~parity +8'h01;//僠僃僢僋僒儉
$fwrite(fi,"%2h",parity);
$fwrite(fi,"\n");
end
$fdisplay(fi,":00000001FF");
$fclose(fi);
str="rom.ver";
//$convert_hex2ver("rom.hex",40,str);//僠僃僢僋Veritak丂Unique僼傽儞僋僔儑儞
end
endtask
//xilinx coe file
task make_coe_file(input [7:0] bytes_per_word,
input integer address_max);
integer fi;
integer ad;
begin
fi=$fopen("rom.coe","w");
$fdisplay(fi,"memory_initialization_radix=16;");
$fdisplay(fi,"memory_initialization_vector=");
for (ad=0;ad <address_max;ad=ad+1) begin
$fdisplay(fi,"%h,",micro_rom[ad]);
end
$fdisplay(fi,"%h;",micro_rom[address_max]);
$fclose(fi);
end
endtask
function [39:0]romdata;
input [15:0] address;
case(address)
//Commad A_addr, B_addr, Write_addr, Jmp_cond, Reserved, IM
0: `SET(P_OUT, 100);
1: `SET(R0, 5);
2: `MOV(R0, R1);
3: `MOV(R1, R2);
4: `MOV(R2, R3);
5: `SUB(R1, R2, R0);
6: `SUB(R3, R1, R3);
7: `ADD(P_IN, P_OUT, P_OUT);
8: `ADD(P_OUT, P_OUT, P_OUT);
9: `SUB(P_IN, P_IN, R1);
10: `SUB(P_OUT, P_IN, R2);
11: `SET(R0, 2);
12: `SET(R1, 8);
13: `MUL(R0, R1, R3);
14: `NOP;
15: `MUL(R3, R3, R3);
16: `ADD(P_OUT, R3, P_OUT);
17: `SYNC;
18: `JUMP(1000);
// 僔僼僩丒忔嶼
1000: `SET(R0, 5);
1001: `SET(R1, 2);
1002: `ADD_LOOP(R0, R1, R0, 10);
1003: `SHIFT_L_LOOP(R1, 5);
1004: `SHIFT_R_LOOP(R1, 5);
1005: `SUB_LOOP(R0, R1, R0, 10);
1006: `SET(P_OUT, 5);
1007: `MUL_LOOP(P_OUT, R1, P_OUT, 7);
1008: `JUMP(1500);
// 忦審暥
1500: `SET(R0, 16);
1501: `SET(R1, 2);
1502: `SET(P_OUT, 0);
1503: `SUB(R0, R1, R0);
1504: `JUMP_IF_GT(R0, R1 ,1503);
1505: `NOP ;//NOP憓擖 丂僨傿儗僀僪僗儘僢僩
// 忦審暥
1506: `SET(R2, 16);
1507: `SET(R3, 2);
1508: `SET(P_OUT, 0);
1509: `SUB(R2, R3, R2);
1511: `JUMP_IF_GTE(R2, R3 ,1509);
1512:`NOP;//NOP憓擖丂僨傿儗僀僪僗儘僢僩
// 1010_1010_1010_1010
// 價僢僩斀揮
1513: `SET(R0, 43690);
1514: `NOT(R0, R1);
// 僶儗儖僔僼僞
1515: `SET(R0, 2);
1516: `SET(R1, 7);
1517: `SET(R2, 0);
1518: `BSHIFT_L(R0, R1, R0);
1519: `BSHIFT_R(R0, R1, R0);
1520: `JUMP(0);
default: romdata = 0;
endcase
endfunction
endmodule
側偍丄崱夞偺曄峏偱丄
Staratix嘦偼丄88MHz
Spartan 3偼丄44MHz 偲側傝傑偟偨丅
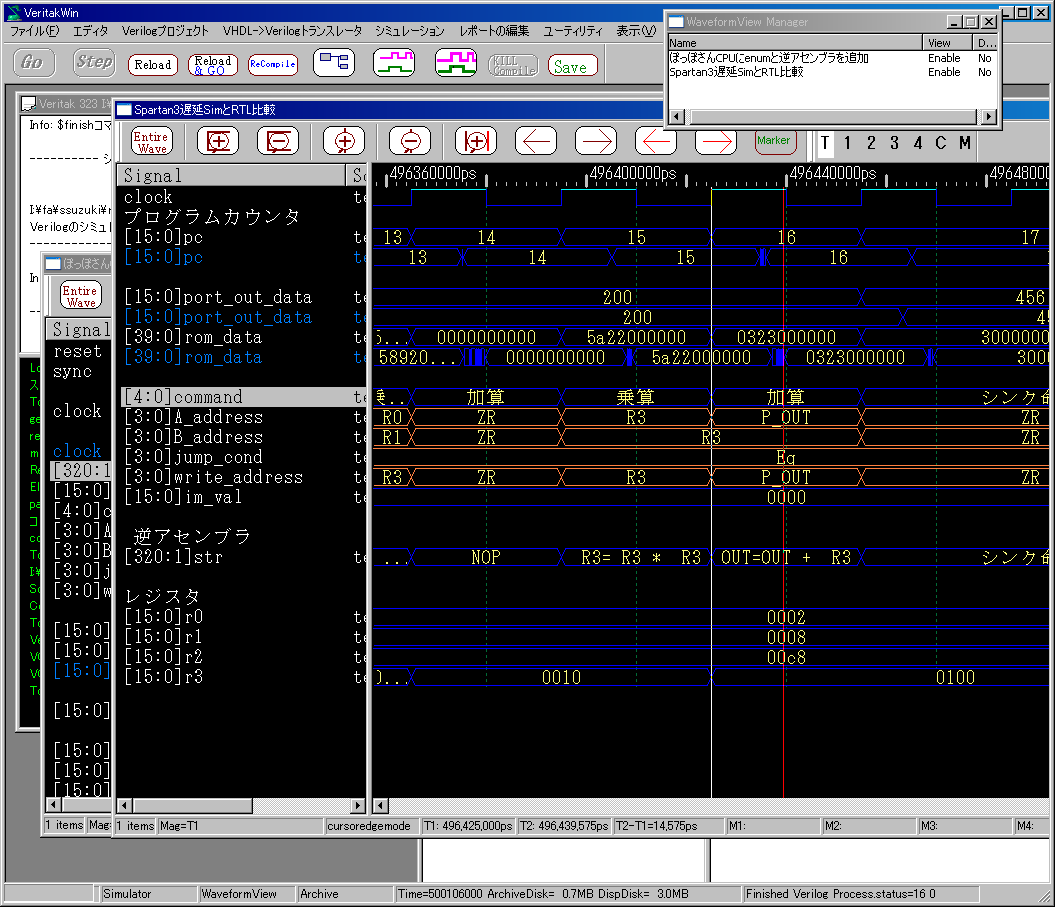
崌惉屻偺抶墑僔儈儏儗乕僔儑儞寢壥(惵怓VCD)偱偡丅
Spartan3
摨條偵Staratix嘦偱偡丅
僔儞僋儘僫僗ROM偺傾乕僇僀僽偱偡丅
RAM偺幚憰
FPGA偺RAM傪僨乕僞儊儌儕偲偟偰巊偆偙偲傪峫偊傑偡丅偙偙偱偼丄奜晹RAM傪巊偆偙偲偼峫椂偣偢偵丄FPGA撪偺RAM傪巊偆偙偲傪峫偊傑偡丅
偝偰偙偙偱偺栤戣偼丄摨婜RAM偵偁傝傑偡丅偲傝偁偊偢WIZARD偱RAM傪嶌偭偰傒傑偟傚偆丅
Single_PortRAM傪惗惉偟傑偡丅
偲傝偁偊偢丄16價僢僩暆2K儚乕僪偱偡丅

Q弌椡側偟偵偟傑偡丅偙偺僟僀傾僌儔儉偺捠傝丄RAM偵偍偄偰傕慜抜偵FF偑擖偭偰偟傑偄傑偡丅廬偭偰丄侾CLOCK抶傟偰偟傑偆偙偲偵拲堄偟偰偔偩偝偄丅CPU偐傜尒偰WRITE偼丄彂偒偭傁側偟側偺偱侾CLOCK偱WRITE偱偒傑偡偑丄READ偼丄侾CLOCK偱偼曉偭偰偒傑偣傫丅偙偙偱偺愝寁偼戝偒側暘偐傟栚偱偡丅俀CLOCK傪嫋梕偱偒側偄偲偡傞偐丄尒偨栚偵侾CLOCK丂R/W偲側傞傛偆偵丄慡懱偺僽儘僢僋傪峫偊側偍偡偐偲偄偆栤戣偵側傝傑偡丅屻幰偼丄CPU慡懱偺僷僀僾儔僀儞壔偵傛偭偰払惉偡傞偙偲偑偱偒丄僷僀僾儔僀儞偵傛傝丄摦嶌懍搙傪岦忋偝偣傞偙偲偑偱偒傑偡丅偟偐偟椙偄帠偽偐傝偱偼側偔丄偟傢婑偣偼丄JUMP柦椷偵尰傟傑偡丅JUMP傾僪儗僗偑惷揑偵寛傑偭偰偄傞側傜偽丄愭撉傒偵傛傝夞旔偡傞偙偲偑偱偒傑偡偑丅JUMP傾僪儗僗偑摦嶌帪偵偟偐寛傑傜側偄応崌丄懄偪丄忦審僽儔儞僠傗丄忦審CALL偑偁傞応崌丄僷僀僾儔僀儞暘偺抜悢偵墳偠偨僋儘僢僋悢偑偐偐偭偰偟傑偄傑偡丅丂乮侾CLOCK偱READ/WRITE偡傞僷僀僾儔僀儞偺椺偼丄偙偪傜偺僷僀僾儔僀儞偺専摙傪尒偰偔偩偝偄丅僷僀僾儔僀儞偑怺偄偲偦傟偩偗儁僫儖僥傿傕戝偒偔側傝傑偡丅乯
崱夞偼丄娙扨側愝寁傪栚巜偟偰偄傞偺偱丄僷僀僾儔僀儞偼巊傢偢丄READ偺傒俀CLOCK丄偦偺懠偼侾CLOCK偲偡傞曽恓偱愝寁偟傑偡丅
傾僪儗僔儞僌儌乕僪
壓婰偺擇偮傪旛偊傑偡丅R0傪僀儞僨僢僋僗偲偟偨傾僪儗僔儞僌偱偡丅
- Immediate
- Immediate+R0
埲壓捛壛晹偱偡丅
Altera/Xilinx 偺RAM傪擖傟崬傓慜偵柾媅僶乕僕儑儞偱摦嶌妋擣偟偰偍偒傑偡丅
//ALTERA RAM偺柾媅僐乕僪
`define PHY_ADD_MAX_RAM (1024*2-1)//Dec.17.2006
reg [15:0] ram [0:`PHY_ADD_MAX_RAM];
reg [15:0] ram_address_latch;
reg ram_write_enable_latch;
reg [15:0] ram_data_latch,ram_output_data;
//傾僪儗僗儔僢僠丄僨乕僞儔僢僠丄儔僀僩Enable儔僢僠偑偁傞
always @(posedge clock) ram_address_latch<=ram_address;
always @(posedge clock) ram_write_enable_latch<=ram_write_enable;
always @(posedge clock) ram_data_latch<=ram_input_port;
always @* begin
ram_output_data=ram[ram_address_latch];
end
assign ram_output_port=ram_output_data;
always @(negedge clock) begin//棫壓傝偱撪晹RAM偵彂偒崬傒
if (ram_write_enable_latch) begin
ram[ram_address_latch] <=ram_data_latch;
end
end
RAM傪儗僕僗僞偲摨偠傛偆偵埖偆偺偱丄儗僕僗僞傾僪儗僗偺傾僪儗僗嬻娫偵捛壛偟傑偡丅
// 儗僕僗僞傾僪儗僗 `define ZR 4'b0000 `define R0 4'b0001 `define R1 4'b0010 `define R2 4'b0011 `define R3 4'b0100 `define P_IN 4'b0101 `define P_OUT 4'b0110 `define RAM_PORT 4'b0111 //Dec.17.2006
ROM偺價僢僩僼傿乕儖僪偵傕捛壛偟傑偡丅
價僢僩18偼丄RAM偺WriteEnable偵偟傑偡丅
價僢僩17偼丄僀儞僨僢僋僗傾僪儗僔儞僌偐愨懳傾僪儗僗偐傪寛傔偰偄傞僼儔僌偱偡丅
ROM儚僀儎乕儅僢僾
價僢僩埵抲 價僢僩暆 撪梕
39:35 5 柦椷
34:31 4 儗僕僗僞僼傽僀儖A億乕僩偺傾僪儗僗
30:27 4 儗僕僗僞僼傽僀儖B億乕僩偺傾僪儗僗
26:23 4 儗僕僗僞僼傽僀儖儔僀僩億乕僩偺傾僪儗僗
22:19 4 僕儍儞僾斾妑忦審
18:18 1 RAM_WRITE_Enable //Dec.17.2006
17:17 1 RAM 傾僋僙僗偺応崌偺R0傪index reg 偲偟偰巊梡偡傞偐偳偆偐偺僼儔僌.1偱娫愙傾僪儗僔儞僌//Dec.17.2006
16:16 1 loop_flag 儖乕僾張棟偡傞偐偳偆偐偺僼儔僌丄侾偱儖乕僾張棟
15:0 16 懄抣傑偨偼丄旘傃愭,傑偨偼丄RAM傾僪儗僗
RAM偺傾僪儗僗惗惉晹偲丄RAM偺僨乕僞擖椡晹偱偡丅RAM偺僨乕僞擖椡偼丄ALU偺弌椡傪偦偺傑傑弌偟傑偡丅偙偺曈偼丄CISC傐偄偱偡偹丅
wire index_flag =reserved[1];//Dec.17.2006 wire [15:0] out_dataA, out_dataB; wire [15:0] alu_data; wire ram_write_enable = reserved[2];//Dec.17.2006 wire [15:0] ram_output_port;//Dec.17.2006 wire [15:0] ram_input_port=alu_data;//Dec.17.2006 wire [15:0] index_reg;//Dec.17.2006 wire [15:0] ram_address=index_flag? immediate_data+index_reg :immediate_data;//Dec.17.2006
儗僕僗僞僼傽僀儖偐傜偼丄R0傪index_reg偲偟偰堷偒弌偟傑偡丅
// 儗僕僗僞僼傽僀儖
register_file register_file(.clock(clock),
.reset(reset),
.A_address(A_address),
.B_address(B_address),
.write_address(write_address),
.alu_data(alu_data),
.out_dataA(out_dataA),
.out_dataB(out_dataB),
.port_in_data(Aport_data),.ram_port(ram_output_port),.r0(index_reg),//Dec.17.2006
.port_out_data(port_out_data));
ifdef 偱RAM偺僀儞僗僞儞僗偼丄愗傝懼偊傪峴偄傑偡丅
`ifdef ALTERA
altera_ram2kx16 altera_ram (
.address(ram_address),
.clock(clock),
.data(ram_input_port),
.wren(ram_write_enable),
.q(ram_output_port)
);
`elsif XILINX
ram_xilinx2k16 xilinx_ram(
.addr(ram_address),
.clk(clock),
.din(ram_input_port),
.dout(ram_output_port),
.we(ram_write_enable));
`else
//ALTERA RAM偺柾媅僐乕僪
`define PHY_ADD_MAX_RAM (1024*2-1)//Dec.17.2006
reg [15:0] ram [0:`PHY_ADD_MAX_RAM];
reg [15:0] ram_address_latch;
reg ram_write_enable_latch;
reg [15:0] ram_data_latch,ram_output_data;
//傾僪儗僗儔僢僠丄僨乕僞儔僢僠丄儔僀僩Enable儔僢僠偑偁傞
always @(posedge clock) ram_address_latch<=ram_address;
always @(posedge clock) ram_write_enable_latch<=ram_write_enable;
always @(posedge clock) ram_data_latch<=ram_input_port;
always @* begin
ram_output_data=ram[ram_address_latch];
end
assign ram_output_port=ram_output_data;
always @(negedge clock) begin//棫壓傝偱撪晹RAM偵彂偒崬傒
if (ram_write_enable_latch) begin
ram[ram_address_latch] <=ram_data_latch;
end
end
`endif
儗僕僗僞僼傽僀儖偺婰弎偱偡丅
// 儗僕僗僞僼傽僀儖
// 婰壇慺巕傪儗僕僗僞偺廤傑傝偲偟偰丄傑偲傔偰儌僕儏乕儖壔丅
// 摨帪偵撉傒彂偒偱偒傞億乕僩偑俁偮
// 儔僀僩億乕僩偑侾偮丄儕乕僪億乕僩偑俀偮丅
// R0傪IndexReg偲偟偰巊梡偡傞
module register_file(input clock,
input reset,
input [3:0] A_address,
input [3:0] B_address,
input [3:0] write_address,
input [15:0] alu_data, port_in_data,ram_port, //Dec.17.2006
output [15:0] out_dataA, out_dataB, port_out_data,
output reg [15:0] r0
);
// CPU儗僕僗僞
reg [15:0] p_out_reg, r1, r2, r3;
// 億乕僩傾僂僩儗僕僗僞
always @(posedge clock, posedge reset) begin
if(reset)
begin
p_out_reg <= 0;
end
else if(write_address == `P_OUT)
begin
p_out_reg <= alu_data;
end
else
begin
p_out_reg <= p_out_reg;
end
end
// 斈梡儗僕僗僞R0
always @(posedge clock, posedge reset) begin
if(reset)
begin
r0 <= 0;
end
else if(write_address == `R0)
begin
r0 <= alu_data;
end
else
begin
r0 <= r0;
end
end
// 斈梡儗僕僗僞R1
always @(posedge clock, posedge reset) begin
if(reset)
begin
r1 <= 0;
end
else if(write_address == `R1)
begin
r1 <= alu_data;
end
else
begin
r1 <= r1;
end
end
// 斈梡儗僕僗僞R2
always @(posedge clock, posedge reset) begin
if(reset)
begin
r2 <= 0;
end
else if(write_address == `R2)
begin
r2 <= alu_data;
end
else
begin
r2 <= r2;
end
end
// 斈梡儗僕僗僞R3
always @(posedge clock, posedge reset) begin
if(reset)
begin
r3 <= 0;
end
else if(write_address == `R3)
begin
r3 <= alu_data;
end
else
begin
r3 <= r3;
end
end
// A億乕僩弌椡(ALU傊)
assign out_dataA = (A_address==`P_OUT) ? p_out_reg :
(A_address==`P_IN) ? port_in_data :
(A_address==`RAM_PORT) ? ram_port: //Dec.17.2006
(A_address==`R0) ? r0 :
(A_address==`R1) ? r1 :
(A_address==`R2) ? r2 :
(A_address==`R3) ? r3 : 16'b0;
// B億乕僩弌椡(ALU傊)
assign out_dataB = (B_address==`P_OUT) ? p_out_reg :
(B_address==`P_IN) ? port_in_data :
(B_address==`RAM_PORT) ? ram_port: //Dec.17.2006
(B_address==`R0) ? r0 :
(B_address==`R1) ? r1 :
(B_address==`R2) ? r2 :
(B_address==`R3) ? r3 : 16'b0;
// 弌椡億乕僩(偦偺傑傑弌椡)
assign port_out_data = p_out_reg;
endmodule
RAM偺R/W偵娭偡傞儅僀僋儘柦椷偺捛壛晹偱偡丅
CPU->RAM傊偺彂偒崬傒偼丄俀CLK偐偐傞偺偱偡偑丄CPU偐傜偼尒偊傑偣傫丅偱偡偺偱侾CLK偱師偺柦椷傪幚峴偱偒傑偡丅
RAM->CPU偺撉傒崬傒偼丄俀CLK偐偐傞偺偱丄擇偮偺柦椷偱峔惉偟傑偡丅嵟弶偺柦椷偼丄傾僪儗僗巜掕偩偗偱偡丅師偺柦椷偱丄撉傒崬傒丄偮傑傝儗僕僗僞傊偺彂偒崬傒傪峴偄傑偡丅偙偺偲偒丄儅僀僋儘僼傿乕儖僪偺傾僪儗僗晹偼梀傫偱偄傑偡偺偱丄師偺撉傒崬傒傾僪儗僗傪巜掕偱偒傑偡丅偮傑傝僷僀僾儔僀儞揑側婰弎偑壜擻偱丄撉傒崬傒柦椷偑楢懕偡傞応崌偼丄侾CLK偱嵪傒傑偡丅
wire indirect_flag=Data[17];//Dec.17.2006
wire ram_write=Data[18];//Dec.17.2006
// 儗僕僗僞傾僪儗僗
parameter [3:0] P_OUT=`P_OUT,//IO億乕僩弌椡
P_IN=`P_IN, //IO億乕僩擖椡
RAM_PORT=`RAM_PORT, //RAM 億乕僩丂Dec.17.2006
R0= `R0,
R1= `R1,
R2= `R2,
R3= `R3,
ZR= `ZR; // 僛儘儗僕僗僞 (= 僛儘GND)
// 儖乕僾張棟 傑偨偼丄RAM儔僀僩張棟
//儖乕僾抣偼俼俙俵傾僪儗僗偲嫟梡側偺偱俼俙俵偵娭偟儖乕僾偼晄壜
parameter [2:0] Reserved = 3'b000,
LoopEnabled = 3'b001,
RAM_write_enable=3'b100, //Dec.17.2006丂 價僢僩俀傪RAM丂WriteEnable偵巊梡
RAM_read_port_enable_with_index=3'b011,//Dec.17.2006丂價僢僩侾乕亜 INDEX晅偒
RAM_write_enable_with_index=3'b111; //Dec.17.2006丂 價僢僩俀傪RAM丂WriteEnable偵巊梡價僢僩侾亅亜俬俶俢俤倃晅偒
//RAM傊儔僀僩 RAM[address]=source_reg Dec.17.2006 儔僀僩偼2僋儘僢僋偐偐傞偑CPU偐傜偼尒偊側偄
`define MOV_TO_RAM(source_reg,address) romdata={Add,source_reg,ZR,ZR,Eq,RAM_write_enable,16'd address}
// RAM[address+r0]=source_reg
`define MOV_TO_RAM_W_I(source_reg,address) romdata={Add,source_reg,ZR,ZR,Eq,RAM_write_enable_with_index,16'd address}
//RAM偐傜儕乕僪 Dec.17.2006
//READ 偼2僋儘僢僋偐偐傞偺偱丄2儅僀僋儘柦椷慻偱巊偆 1僋儘僢僋栚偱傾僪儗僗巜掕丄2僋儘僢僋栚偱儗僕僗僞傊偺儔僀僩
// dest_reg=RAM[address]
`define MOV_FROM_RAM_pre(address) romdata={Add,ZR,ZR,ZR,Eq,Reserved,16'd address}//傾僪儗僗巜掕,偙偺娫懠偺儗僕僗僞墘嶼傪峴偭偰傕椙偄
`define MOV_FROM_RAM(dest_reg,address) romdata={Add,RAM_PORT,ZR,dest_reg,Eq,Reserved,16'd address}//儗僕僗僞傊彂偒崬傒
//dest_reg=RAM[address+r0]
`define MOV_FROM_RAM_W_I_pre(address) romdata={Add,ZR,ZR,ZR,Eq,RAM_read_port_enable_with_index,16'd address}//傾僪儗僗巜掕,偙偺娫懠偺儗僕僗僞墘嶼傪峴偭偰傕椙偄
`define MOV_FROM_RAM_W_I(dest_reg,address) romdata={Add,RAM_PORT,ZR,dest_reg,Eq,RAM_read_port_enable_with_index,16'd address}//儗僕僗僞傊彂偒崬傒
儅僀僋儘僐乕僪偺椺偱偡丅扨敪撉傒弌偟偱偼丄倶倶丵pre柦椷偱傾僪儗僗巜掕偟偨屻偵撉傒弌偡柦椷偑昁梫偱偡偑丄楢懕撉傒弌偟偱偼丄倶倶丵pre柦椷偑晄梫偵側偭偰偄傑偡丅
function [39:0]romdata;
input [15:0] address;
case(address)
//Commad A_addr, B_addr, Write_addr, Jmp_cond, Reserved, IM
//simple test
0:`SET(R0,1000);
1:`SET(R1,2000);
2:`SET(R2,3000);
3:`MOV_TO_RAM(R0,0);
4:`MOV_TO_RAM(R1,1);
5:`MOV_TO_RAM(R2,2);
6:`MOV_FROM_RAM_pre(0);
7:`MOV_FROM_RAM(P_OUT,0);
8:`MOV_FROM_RAM_pre(1);
9:`MOV_FROM_RAM(P_OUT,1);
10:`MOV_FROM_RAM_pre(2);
11:`MOV_FROM_RAM(P_OUT,2);
//index register write test
12:`SET(R3,2048);//for (r0=0;r0<2048;r0++){
13:`SET(R1,1);//r1=1;
14:`SET(R0,0);//r0=0;
15:`MOV_TO_RAM_W_I(R0,0);//mem[r0+0]=r0
16:`ADD(R0,R1,R0);// r0++;
17:`JUMP_IF_LT(R0, R3 ,15);// }
//index register read test
18:`SET(R0,0);//r0=0;
19:`SET(R3,1000);
20:`SET(R1,4);
21:`MOV_FROM_RAM_W_I_pre(1048);//ram_address=r0+1048
22:`MOV_FROM_RAM_W_I(P_OUT,1049);//P_OUT=mem[ram_address] ram_address2=r0+1049
23:`MOV_FROM_RAM_W_I(P_OUT,1050);//P_OUT=mem[ram_addres2]
24:`MOV_FROM_RAM_W_I(P_OUT,1051);//.. software pipeline
25:`MOV_FROM_RAM_W_I(P_OUT,1052);//.. software pipeline
26:`ADD(R0,R1,R0);// r0 +=4;
27:`JUMP_IF_LT(R0, R3 ,21);// }
45:`JUMP(0);
..
RTL丂Sim
RAM Write偺條巕偱偡丅侾CLK枅偵彂偗傑偡丅

Read偺條巕偱偡丅

XILINX丂RTL丂SIM偲抶墑SIM
抶墑SIM偼丄PortOUT偺弌椡傪VCD偱尒偰偄傑偡丅RTL偲堦抳偟偰偄傑偡丅
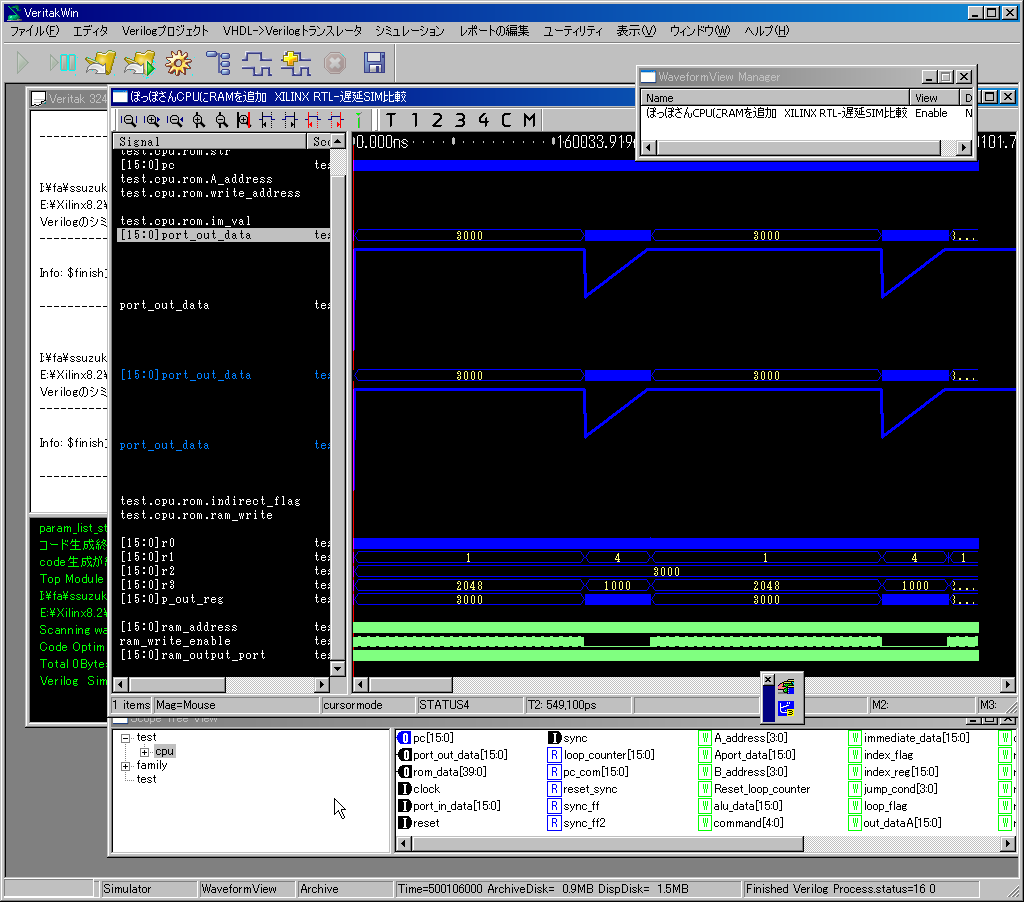
Altera丂RTL丂SIM偲抶墑SIM
摨條偵Altera丂Version偱偡丅
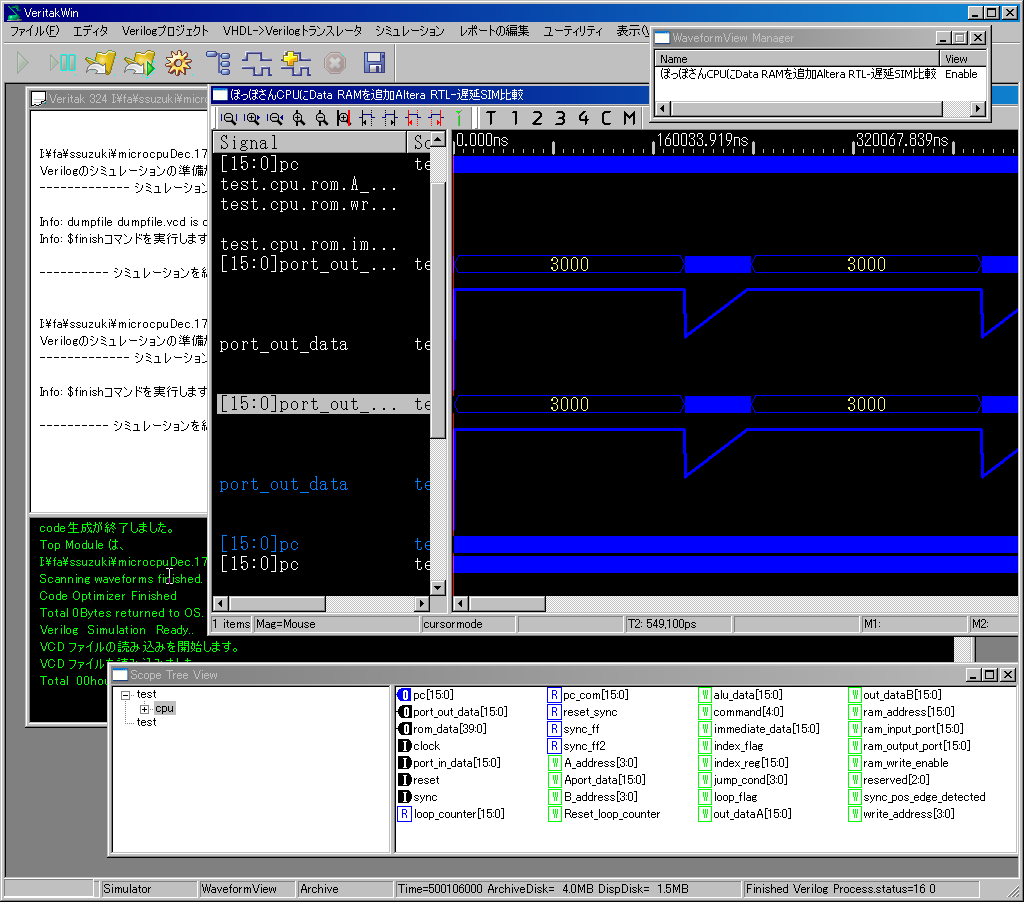
RAM斉偺僟僂儞儘乕僪乮Generic,Altera,Xilinx丄RTL/抶墑SIM)
亙師偺奼挘埬亜
丂偲傝偁偊偢RAM偺幚憰偼廔傢偭偨偺偱偡偑丄晛捠偺CPU偱偼丄傗偭傁傝偁傑傝柺敀偔側偄偺偱丄傾乕僉僥僋僠儍偲偟偰DSP傪巙岦偟偰傒傞偙偲偵偟傑偟偨丅FIR僼傿儖僞丄FFT,僟僂儞僐儞僶乕僞丄僒乕儃墘嶼摍偱梀傋偨傜傛偄側丠偲巚偄傑偡丅儕僜乕僗巊梡検偼偁傑傝婥偵偟側偄偱丄偱偒傞偩偗娙扨側愝寁傪怱偑偗偨偄偲巚偄傑偡丅僐儞僷僀儔嶌惉偱偼丄擔杮偱偼偁傑傝側偠傒偑側偄偲巚傢傟傞Antlr偲偄偆僣乕儖傪徯夘偡傞梊掕偱偡丅峔暥夝愅偼丄Flex/Bison傗丄Boost::spirit偑傛偔抦傜傟偰偄傑偡偑丄Antlr傕偦偺傛偆側僣乕儖偱偡丅偙偺僣乕儖偼丄C++傗丄JAVA,Python傪弌椡偟傑偡丅
- 僔儞僋儘僫僗ROM偺幚憰丂乮嵪傒乯
- 僔儞僋儘僫僗RAM偺幚憰丂(嵪傒乯
- DSP儔僀僋側傾乕僉僥僋僠儍偺専摙
- 傾乕僉僥僋僠儍偺専徹
- 傾僙儞僽儔偺嶌惉
- FIR偺幚憰
- 僈儘傾懱忔嶼婍偺幚憰
- 僈儘傾懱彍嶼婍乮傾僙儞僽儔偵傛傞乯
- 儕乕僪僜儘儌儞僨僐乕僟偺幚憰
- Tiny尵岅僐儞僷僀儔愝寁
- 帤嬪夝愅丄峔暥夝愅乮Antlr偵傛傞幚憰乯
- 僐乕僪惗惉婍乮C++)
- Tiny丂傾僾儕働乕僔儑儞偺嶌惉
DSP儔僀僋側傾乕僉僥僋僠儍偺専摙
偙偆偄偆愇偵偟偨偄丄偲偄偆偺傪巚偄偮偔傑傑偵楍嫇偟偰傒傑偟偨丅
- MAC墘嶼偺僒億乕僩丂16x16+40
- Deep僷僀僾儔僀儞丂
- 悈暯宆儅僀僋儘僾儔僌儔儉傾乕僉僥僋僠儍丂
- Repeat墘嶼丄DoLoop偺H/W僒億乕僩
- Stratix嘦偱200MHz嬱摦傪栚巜偡丂
- H/W丂Do丂Loop偱偼丄Jump帪傕MAC墘嶼偑壜擻丂
- 僾儘僌儔儉僕儍儞僾偼丄4CLK偐偐偭偰傕傛偄
嵟嬤偺FPGA偺傾乕僉僥僋僠儍傪偆傑偔惗偐偡偵偼丠
僾儘僙僢僒傪崅懍壔偡傞偵偼丄悅捈曽岦偺崅懍壔丄偡側傢偪Deep丂Pipeline偑桳岠偱偡丅摦揑側僕儍儞僾偑側偄偲偟偨傜丄偄偔傜偱傕僷僀僾儔僀儞壔偱崅懍偵偡傞偙偲偑偱偒傑偡丅栤戣偼僕儍儞僾偱偁傞偲偄偆偙偲偼丄忋偱尒傑偟偨丅偲偙傠偱丄FFT傗丄FIR偼丄FOR丂LOOP偵傛傞墘嶼偵側傝傑偡偑丄偙傟傜偼丄僕儍儞僾売強偲儖乕僾悢偑幚峴帪偵曄壔偡傞偙偲偼側偄偺偱丄僾儘僌儔儉偵傛傞HW壔傪偡傞偙偲偑偱偒傑偡丅偮傑傝Deep丂Pipeline傪堐帩偟側偑傜丄墘嶼儖乕僾偱偼JUMP儁僫儖僥傿偑慡偔側偄張棟傪偡傞偙偲偼壜擻偱偡丅偨偩丄梊應暘婒偲偐柺搢側偙偲偼偟側偄偺偱丄僕儍儞僾柦椷帺懱偼係CLK埵Delayed丂Slot乮僕儍儞僾柦椷偺屻傕幚峴偟偰偟傑偆乯偑敪惗偟偰傕傛偟丄偲偟傑偡丅傑偨丄嵟嬤偺FPGA偼丄忔嶼婍傪丄悢屄埲忋愊傫偱偄傞偺偑晛捠偱丄梀傫偱偄傞偺傕栜懱側偄榖偱偡丅偙傟偵偼悈暯曽岦偺暲楍墘嶼偑桳岠偱偟傚偆丅FPGA偱偼丄僔儞僌儖ALU偵偙偩傢傞棟桼偼偁傝傑偣傫丅
偟偐偟側偑傜丄巚偄偮偄偨巇條偼丄僴乕僪揑偵旘桇偟夁偓傞偺偱丄
僥乕儅偼丄乽Verilog偱偍庤寉CPU乿偵栠傝傑偡丅
傑偢偼丄晛捠偵TINY丂C僐儞僷僀儔偑憱傞CPU傪嶌傞偙偲傪栚昗偵偟傑偡丅
偦偙偱丄晛捠偺CPU偺巇條傪峫偊偰傒傑偡丅
僥乕儅偑恻梋嬋愜偟偰偄傑偡偑丄帠忣偑偁傝丄YACC儀乕僗偱偺32價僢僩CPU僴乕僪惢嶌偵曄峏偟傑偡丅TINY丂C僐儞僷僀儔偺惢嶌偼僴乕僪惢嶌屻偵峴偄傑偡丅偛傔傫側偝偄丅媽YACC偲偺堘偄偼丄
戞堦偵
- 奜晹僶僗偵愙懕壜擻偱偁傞偙偲
- 椺奜張棟傪僒億乕僩偡傞偙偲
戞擇偺栚昗偼
- TLB偺僒億乕僩
- 僉儍僢僔儏偺僒億乕僩
偱偡丅YACC偼丄僪儔僀僗僩乕儞傪椙偔尒偣傞偙偲傪戞堦媊偵愝寁偟偨偨傔偵丄嬱摦廃攇悢偼懍偄偺偱偡偑丄奜晹RAM偵偼愙懕偱偒偢斈梡揑偲偼尵偊傑偣傫丅偦偙偱丄懡彮懍搙傪媇惖偵偟偰斈梡揑側愝寁傪峴偭偰傒傑偡丅
嵟廔栚昗偼丄帺慜C僐儞僷僀儔傪巊偄丄OS忋偱帺慜偺CPU傪憱傜偣傞偙偲偱偡丅摴偼墦偔挿偄偱偡丅偦偙偱丄愭恖偺抦尒傪扝偭偰尒傞偙偲偵偟傑偟傚偆丅RISC偺嫵壢彂偲傕尵偊傞愝寁椺偲偟偰丄乮Z80傪忋夞傞検偺乯悽奅拞偵條乆側僜乕僗偑偁傝傑偡丅傑偨偙偺懠偵丄CPU僔儈儏儗乕僞丄嫵堢梡OS傕戲嶳偁傝傑偡丅偪傚偭偲廤傔偨偩偗偱埲壓偺傛偆偵戲嶳偺CPU僜乕僗偑偁傝傑偡丅偟偐偟丄尒偨偩偗偱偼丄婡夿岅偐傜C僜乕僗傪憐憸偡傞傛偆側傕偺偱側偵傕暘偐傜側偄偱偟傚偆丅乮丂偦偙偵杮峞偺懚嵼堄媊偑偁傝傑偡丅乯
| 僯僢僋僱乕儉 | 尵岅 | 摿挜 |
| YACC | Verilog | 愘嶌丅5抜僷僀僾儔僀儞丅 |
| MIPS儅僀僐儞傪嶌傠偆 | Verilog | 儕僜乕僗巊梡検偼FZ80偺1/2偵側偭偨偲偺偙偲丅 |
| Plasma | VHDL | 3-5抜僷僀僾儔僀儞丅帺慜RTOS偱WEB僒乕僶偺僨儌偁傝 |
| Yellow丂star | 夞楬恾 | 5抜僷僀僾儔僀儞丅TLB傪娷傓愝寁丅 |
| Ucore | Verilog | 5抜僷僀僾儔僀儞丅 |
| 揹捠戝 | Verilog | |
| 嬨岺戝 | VHDL | 僜乕僗傪尒傞偵偼搊榐偑昁梫(搊榐偟傑偟偨乯 |
| Minimips | VHDL |
傑偢偼丄梫審傪彂偒弌偟偰傒傑偡丅
- 傾僪儗僗嬻娫傪32價僢僩偵偡傞
- 妱傝崬傒偲椺奜張棟傪恀柺栚偵峴偆
- 枹幚憰柦椷偺幚憰
- 擟堄偺僞僀儈儞僌偱僗僩乕儖偱偒傞
- 彨棃偺TLB僒億乕僩偺堊偵僷僀僾儔僀儞偺妱晅傪嵞専摙
- 懍搙傪慱傢偢丄愝寁偺梕堈惈傪桪愭
嫵壢彂偼丄
- 儅僀僋儘僾儘僙僢僒擖栧丂拞怷復丂CQ弌斉
偱丄偙傟偼昁恵偱偡丅嵶偐偄柦椷僙僢僩偺拞恎偼搶幣偺TX-39僼傽儈儕乕傪尒傟偽傛偄偱偟傚偆丅丂
僷僀僾儔僀儞妱晅専摙
杮暔偺LINUX傪憱傜偣傞偨傔偵偼MMU側偟偱偼憱傝傑偣傫丅(uCLimux/uCOS嘦/Toppers偼MMU側偟偱傕OK乯
偲傝偁偊偢偼丄俵俵倀偼幚憰偟側偄偺偱偡偑彨棃偺Reserve偑昁梫偐偳偆偐丄俵俵倀偺桳柍偑僷僀僾儔僀儞抜悢偵塭嬁偡傞偐偳偆偐傪専摙偟傑偟偨丅
栤戣偼丄TLB偲僉儍僢僔儏偵偁傝傑偡丅
TLB:壖憐僀儞僨僢僋僗暔棟傾僪儗僗偵曄姺丂亅侾CLK
CACHE:暔棟僀儞僨僢僋僗乕暔棟僞僌丂亅侾CLK
偲偄偆僔儕傾儖側幚憰偩偲丄2CLK偐偐偭偰偟傑偄傑偡丅僆儕僕僫儖(R2000)偱偼丄偙傟傪敿僋儘僢僋偯偮峴偄TLB偲僉儍僢僔儏偑僸僢僩偟偨偲偒偼丄僷僀僾儔僀儞偼棎傟傑偣傫丅崱夞偺CPU偼丄POS丂EDGE偺傒傪巊偆偺偱偙偺傑傑偱偼僀儞僗僩儔僋僔儑儞偲僨乕僞傾僋僙僗偵偦傟偧傟2CLK偲側傝5抜僷僀僾偑7抜偵側偭偰偟傑偄傑偡丅僕儍儞僾帪偺Delayed丂SLOT傕侾CLK偱偼嵪傑側偔側傞偺偱偱偒傟偽旔偗偨偄幚憰偱偡丅乮傕偟偙傟偱傗傞偲偡傟偽梊應暘婒傪偟側偄偲僷僼僅乕儅儞僗偑棊偪傑偡丅乯
偦偙偱丄
TLB:壖憐僀儞僨僢僋僗偐傜暔棟傾僪儗僗偵曄姺丂丗丂CACHE丂壖憐僀儞僨僢僋僗偐傜暔棟僞僌斾妑丂-侾CLK乮嫵壢彂109P)
偲暲楍偵峴偊偽丄侾CLK偱嵪傒傑偡丅OS忋偺峫椂傕昁梫側傛偆偱偡偑丄OS偱側傫偲偐偡傞偙偲偵偟傑偟傚偆丅
僷僀僾儔僀儞偼丄僆儕僕僫儖捠傝偺5抜僷僀僾儔僀儞偲偟傑偡丅
YACC偱偼丄Delayed丂SLOT偑3SLOT傕偁傝戝曄偱偟偨偑丄崱夞偼僆儕僕僫儖捠傝偺侾SLOT偺傒偲偟傑偡丅偮傑傝僕儍儞僾丒暘婒柦椷偺捈屻偺柦椷傪暘婒偺桳柍偵偐偐傢傜偢1柦椷暘幚峴偟傑偡丅慡懍椡偱憱偭偰偄傞幵偑媫偵偼岦偒傪曄偊傜傟側偄傛偆偵暘婒屻偱傕幚峴偟偰偟傑偄傑偡丅僐儞僷僀儔偼丄偙偙偵堄枴偺偁傞柦椷傪抲偒傑偡偑丄抲偗側偄応崌偼丄NOP柦椷傪抲偒傑偡丅
崱夞偺僋儕僥傿僇儖僷僗偼丄嫲傜偔RF僗僥乕僕偵側傞偲巚偄傑偡丅儗僕僗僞僼傽僀儖傾僋僙僗亄暘婒柦椷偱偺師PC傾僪儗僗寛掕偑暋嶨側儘僕僢僋偵側傞堊偱偡丅
CPU偐傜偺奜晹傾僋僙僗偼丄僀儞僗僩儔僋僔儑儞丒僨乕僞僉儍僢僔儏偵Hit偟側偄応崌偵婲偙傝傑偡丅偙偺応崌丄奜晹RAM傑偨偼丄奜晹僶僗傊偺傾僋僙僗偵側傞偨傔偵丄摉慠娫偵崌傢側偄偺偱彮側偔偲傕侾CLK偼僗僩乕儖偟傑偡丅惓妋偵偼ACK偑曉偭偰偔傞傑偱僷僀僾儔僀儞傪僗僩乕儖偟傑偡丅乮YACC偼偙偺婡峔偑側偐偭偨偺偱崱夞嵞愝寁偟偰偄傑偡丅嵟弶偐傜峫椂偟偰偍偗偽傛偐偭偨偱偡丅僴僀乯
| IF | RF | ALU | MEM | WB | |
| 侾CLK | 僀儞僗僩儔僋僔儑儞僉儍僢僔儏僼僃僢僠傾僋僙僗 | 儗僕僗僞僼傽僀儖儕乕僪傾僋僙僗 | ALU墘嶼 | 僨乕僞僉儍僢僔儏傾僋僙僗 | 儗僕僗僞僼傽僀儖儔僀僩 |
| 侾CLK | 僀儞僗僩儔僋僔儑儞僉儍僢僔儏僼僃僢僠傾僋僙僗 | 儗僕僗僞僼傽僀儖儕乕僪傾僋僙僗 | ALU墘嶼 | 僨乕僞僉儍僢僔儏傾僋僙僗 | 儗僕僗僞僼傽僀儖儔僀僩 |
| 侾CLK | 僀儞僗僩儔僋僔儑儞僉儍僢僔儏僼僃僢僠傾僋僙僗 | 儗僕僗僞僼傽僀儖儕乕僪傾僋僙僗 | ALU墘嶼 | 僨乕僞僉儍僢僔儏傾僋僙僗 | 儗僕僗僞僼傽僀儖儔僀僩 |
| ... |
偲偙傠偱丄側偤慡柦椷偱5抜側偺偱偟傚偆偐丠丂柦椷偵傛偭偰偼丄ALU墘嶼偺傒偱MEM傾僋僙僗偑側偄柦椷傕偁傝傑偡丅偦偺傛偆側応崌偵偼4抜偱傕傛偄偺偱偼側偄偐偲巚傢傟傞偐傕偟傟傑偣傫丅幚嵺傗偭偰傒傞偲傢偐傞偺偱偡偑丄慡偰偺柦椷偱摨偠抜悢偲偄偆偺偑RISC偺儈僜偱偡丅柦椷枅偵抜悢偑堎側偭偰偄傞偲儕僜乕僗偺嫞崌乮椺偊偽ALU偑2屄梫傞乯偑惗偠傑偡丅慡偰偺柦椷偱僗僥乕僕偑懙偭偰偄傟偽丄側偵傕峫偊傞偙偲偼側偔偰丄儕僜乕僗偺嫞崌偑偁傝傑偣傫丅
乮壓恾嶲徠乯
| t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 | ||||
| 侾 | IF | RF | ALU | MEM | WB | ||||||
| 2 | IF | RF | ALU | MEM | WB | ||||||
| 3 | IF | RF | ALU | MEM | WB | ||||||
| 4 | IF | RF | ALU | MEM | WB | ||||||
| 5 | IF | RF | ALU | MEM | WB | ||||||
| 6 | IF | RF | ALU | MEM | WB | ||||||
| 7 | IF | RF | ALU | MEM | WB |
忋恾偱丄帪崗t5偱偼丄5柦椷偑暲楍偵張棟偝傟偰偄傑偡丅堦偮偺柦椷僔乕働儞僗偲偟偰偼丄5僋儘僢僋傪梫偡傞偺偱偡偑丄柦椷偺張棟懍搙乮僗儖乕僾僢僩乯偱尒傞偲1CLK/1柦椷偱僾儘僙僔儞僌偝傟傞偙偲偑暘偐傝傑偡丅儅僀僋儘僾儘僌儔儉CPU傪忋偱彂偄偰傒傑偟偨偑丄僔儞僋儘僫僗RAM偺READ偼俀CLK傪梫偟偰偄傑偟偨丅偙偙偱偼丄儊儌儕傪傾僋僙僗偡傞柦椷傕偟側偄柦椷傕慡晹弴彉傛偔5僗僥乕僕偲偡傞偙偲偱丄尒偐偗忋侾CLK偺僗儖乕僾僢僩傪払惉偟偰偄傞偙偲偑暘偐傞偲巚偄傑偡丅
僷僀僾儔僀儞僗僥乕僕偲偼丄僼儕僢僾僼儘僢僾偱偡丅1僗僥乕僕偵乮1屄偺乯僼儕僢僾僼儘僢僾傪抲偒忬懺傪婰壇偟傑偡丅偮傑傝僷僀僾儔僀儞傪寛傔傞偲僼儕僢僾僼儘僢僾傪抲偔埵抲偑寛傑傝丄屻偼抜娫偺慻傒崌傢偣夞楬傪愝寁偟偰偄偗偽傛偄栿偱偡丅偦傟偑RTL乮Register丂Transfer丂Level)愝寁偲偄偆偙偲偱偡丅
偦傟偱偼丄嬶懱揑偵5僗僥乕僕暘偺僼儕僢僾僼儘僢僾偼偳偆側傞偱偟傚偆偐丠
師偺傛偆偵彂偒傑偟偨丅丂
//stage0 reg [31:0] PC;//僾儘僌儔儉僇僂儞僞 //stage1 reg [31:0] IR;//僀儞僗僩儔僋僔儑儞儗僕僗僞 //stage2 reg [31:0] IR_LR;//僀儞僗僩儔僋僔儑儞僷僀僾儔僀儞儗僕僗僞 reg [31:0] Sreg,Treg;//ALU慜抜 reg rf_write_lr; //stage3 reg [31:0] AReg;//ALU屻抜 reg [31:0] IR_A;//僀儞僗僩儔僋僔儑儞僷僀僾儔僀儞儗僕僗僞 //stage4 //儗僕僗僞僼傽僀儖擖椡
屻偼丄偙傟傜偺儗僕僗僞偺擖椡傪彂偄偰偄偗偽傛偄偱偡丅埲崀偺僜乕僗偼丄偙傟傜偺儗僕僗僞(堦帪婰壇乯傪拞怱偵尒傞偲暘偐傝傗偡偄偲巚偄傑偡丅
偙偙偱丄戝帠側偙偲偼丄僽儘僢僋恾傪彂偔偙偲偱偡丅乮屄恖揑偵偼庤彂偒偑堦斣偱偡丅乯丂偄偒側傝HDL偲偄偆偺偼丄偙偺埵偺婯柾偱偼偁傝偊傑偣傫丅僽儘僢僋恾偵偡傞偲丄HDL傛傝偼抶墑僷僗摍偺尒捠偟偑傛偔側傝傑偡丅丂乮昅幰偼丄崱夞僽儘僢僋恾傪2夞廋惓偟傑偟偨丅乯
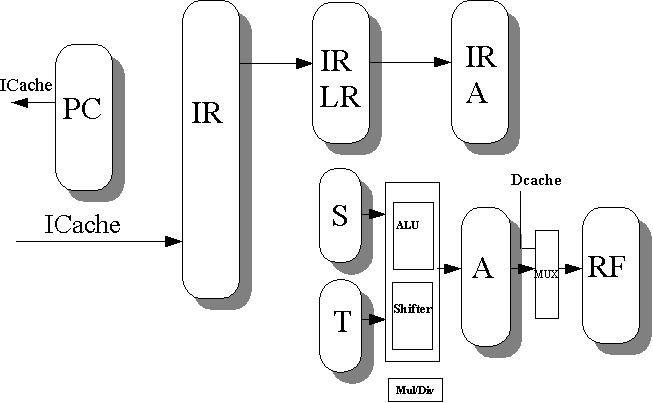
娙扨側僽儘僢僋偺愢柧偱偡丅
[31:0] PC:僾儘僌儔儉僇僂儞僞
[31:0] IR:僀儞僗僩儔僋僔儑儞儗僕僗僞
[31:0] IR_LR丗IR傪侾CLK抶墑偝偣偨僷僀僾儔僀儞儗僕僗僞
[31:0] IR_A: IR_LR傪侾CLK抶墑偝偣偨僷僀僾儔僀儞儗僕僗僞
[31:0]丂S:ALU慜抜SourceRegister
[31:0] T:ALU慜抜TargetRegister
[31:0] A :ALU弌椡儗僕僗僞
[31:0] RF [0:31] 儗僕僗僞僼傽僀儖
PC偺傾僪儗僗傪庴偗偰丄Icahce偼丄僨乕僞乮僀儞僗僩儔僋僔儑儞乯傪CPU偵弌椡丄IR偱庴偗傞丅IR_LR,IR_A偼丄扨弮偵偦傟傪侾CLK偯偮抶墑偝偣偨僷僀僾儔僀儞儗僕僗僞丅奺僷僀僾儔僀儞僗僥乕僕偱昁梫偲側傞惂屼怣崋偼丄偙傟傜偺儗僕僗僞傪僨僐乕僪偟偰嶌傞丅乮愝寁偺拞恎偑棟夝偟堈偄傛偆偵姼偊偰扨弮側峔惉偵偟偰偄傑偡丅乯
師偵丄僷僀僾儔僀儞壔偱栤戣偵側傞帠崁偵偮偄偰尒偰偄偒傑偟傚偆丅
傾乕僉僥僋僠儍偺奣愢摿偵乭楌巎乭偺崁傪偛嶲徠偔偩偝偄丅
偲偙傠偱丄U.S.偱偼丄懡偔偺戝妛偱MIPS傾乕僉僥僋僠儍偺庼嬈偑偁傞傛偆偱偡丅戝曄暘偐傝傗偡偄夝愢偑懡偔偁傝傑偡偺偱
偦傟傜偺儕儞僋傪嫇偘偰偍偒傑偡丅
擖栧揑側夝愢偱偡丅
http://www.eng.tau.ac.il/~arcorg/LECTURES/Lecture1.pdf
http://cs.nyu.edu/courses/spring07/G22.2233-001/lectures/lecture4-6.pdf
摿偵丄僷僀僾儔僀儞偺夝愢偑慺惏傜偟偄偱偡丅
http://www-inst.eecs.berkeley.edu/~cs152/fa04/lecnotes/lec6-2.ppt
Load抶墑-儊儌儕Read捈屻墘嶼偼丄NOP偵側傞
丂儗僕僗僞嶲徠偼丄僼僅儚乕僨傿儞僌偺僥僋僯僢僋偵傛傝丄僷僀僾儔僀儞偵傛傞抶墑傪塀暳偡傞偙偲偑偱偒傑偡偑丄暔棟僉儍僢僔儏傗儊儌儕偺嶲徠偼丄塀暳偡傞偙偲偑偱偒傑偣傫丅嬶懱揑偵偼丄儊儌儕Read捈屻偺墘嶼偼娫偵崌偄傑偣傫丅僐儞僷僀儔偼丄暿側柦椷傪憓擖偟傛偆偲婃挘傝傑偡偑丄偱偒側偄応崌偼NOP傪憓擖偟傑偡丅僴乕僪僂僃傾偼偙傟偵偮偄偰側偵傕堄幆偟傑偣傫丅師偺僨傿儗僀僪僗儘僢僩傕僴乕僪僂僃傾偼摿偵堄幆偡傞昁梫偼偁傝傑偣傫丅僐儞僷僀儔婃挘傟偲偄偆姶偠偱偡丅偙偺傛偆偵儊儌儕巊梡岠棪傪媇惖偵偟偮偮丄僐儞僷僀儔媄弍偱揙掙揑偵僔儞僾儖(=崅懍乯側僴乕僪僂僃傾偵偡傞偲偄偆偺偑弶婜MIPS偺愝寁巚憐偱偼側偄偱偟傚偆偐丅
丂
僨傿儗僀僪僗儘僢僩乕幵偼媫偵偼丄岦偒傪曄偊傜傟側偄
丂僕儍儞僾柦椷傪偄偮敾抐偡傞偺偐偲偄偆偺偑丄廳梫側僷僀僾儔僀儞愝寁偺暘偐傟栚偱偡丅堦斒偵丄僷僀僾儔僀儞傪怺偔偡傟偽丄僕儍儞僾柦椷偺敾抐偼偦傟偩偗抶傟丄僷僀僾儔僀儞偼恑傫偱偟傑偄乮偮傑傝PC偑僀儞僋儕儊儞僩偝傟偰偟傑偄乯僨傿儗僀僪僗儘僢僩偑戝偒偔側偭偰偟傑偄傑偡丅偁傞摑寁偱偼丄僕儍儞僾柦椷偼丄8柦椷偵堦夞偺昿搙偩偦偆偱偡丅媽YACC偱偼丄摦揑僕儍儞僾偼DelayedSlot俁偱偟偨偑丄偙偙偱偼僆儕僕僫儖偵拤幚偵幚憰偟偰偄傑偡丅僉儍僢僔儏柦椷偺Read偵侾CLK丄僨傿儗僀僪僗儘僢僩侾偲偡傟偽丄帺摦揑偵僕儍儞僾敾抐僗僥乕僕偼寛傑傝傑偡丅
| t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 | ||||
| 侾 | IF | RF偙偙偱僕儍儞僾傾僪儗僗傪寛掕偟偰傕 | ALU | MEM | WB | ||||||
| 2 | IF偙偺柦椷偼偡偱偵Fetch丅DelayedSlot偵側傞乮偲偵偐偔幚峴乯 | RF | ALU | MEM | WB | ||||||
| 3 | IF偙偙偱僕儍儞僾愭傾僪儗僗愭柦椷 | RF | ALU | MEM | WB | ||||||
| 4 | IF | RF | ALU | MEM | WB | ||||||
| 5 | IF | RF | ALU | MEM | WB | ||||||
| 6 | IF | RF | ALU | MEM | WB | ||||||
| 7 | IF | RF | ALU | MEM | WB |
偮傑傝丂DelayedSLOT侾偺応崌丄RF丂READ僗僥乕僕偱師偺PC傪寛掕偟偰偍偔昁梫偑偁傝傑偡丅偙偙偺儘僕僢僋偼丄幚偼嵟傕暋嶨側晹暘側偺偱丄杮摉偼丄DelayedSLOT傪俁埵偵偡傟偽丄HW揑偵偼傕偭偲傕傛偄傛偆側婥偑偟傑偡偑丄偦偆偡傞偲僐儞僷僀儔偑慡偔桳岠側柦椷傪憓擖偱偒側偄応崌丄JMP/NOP/NOP/NOP偵側偭偰偟傑偄傑偡丅傑偲傕偵NOP柦椷傪攝抲偡傞偲偟偨傜丄柦椷儊儌儕巊梡岠棪乮僉儍僢僔儏岠棪乯偑斶嶴偵側偭偰偟傑偄傑偡丅
僼僅儚乕僨傿儞僌
丂僷僀僾儔僀儞CPU傪愝寁偡傞偲昁偢弌偰偒傑偡丅
丂嬶懱揑側僐乕僪偼丄師偱偡丅嫵壢彂乮30P嶲徠乯
qa/qb 偑杮摉偺儗僕僗僞僼傽僀儖偺弌椡偱偡偑丄彂偒崬傑傟傞傑偱偵偼丄僷僀僾儔僀儞傪捠夁偡傞暘帪娫偑偐偐傝傑偡丅偟偨偑偭偰丄儗僕僗僞僼傽僀儖傪撉傒弌偡偺偵惗偺qa/qb偼捈偵偼巊傢偢嵶岺傪偟偰傗傝傑偡丅偮傑傝丄儗僕僗僞僼傽僀儖偐傜尒偰枹棃偺彂偒崬傒寢壥傪愭庢傝偟偰壖憐偺儗僕僗僞僼傽僀儖Read弌椡(rf_target_out/rf_source_out)傪嶌偭偰偄傑偡丅
//僼僅儚乕僨傿儞僌夞楬
assign rf_target_out= (rf_dest_addr_lr==IR[20:16] && rf_write_lr && A_Right_SELD1==`A_RIGHT_ERT) ? AReg_input :
(rf_dest_addr_a==IR[20:16] && rf_write_a && A_Right_SELD1==`A_RIGHT_ERT) ? rf_input : qa;
assign rf_source_out=(rf_dest_addr_lr==IR[25:21] && rf_write_lr ) ? AReg_input :
(rf_dest_addr_a==IR[25:21] && rf_write_a) ? rf_input : qb;
幚偼丄偙偺晹暘偑抶墑偺僱僢僋偺堦晹偵側偭偰偄傑偡丅夵慞曽朄偵偮偄偰偼丄暿搑峫偊傞偙偲偵偟傑偟傚偆丅
僗僩乕儖偲偼丠
丂崱夞偼丄奜晹偲偺僀儞僞乕僼僃乕僗偑昁梫偱偡偺偱丄僗僩乕儖婡峔偑昁恵偱偡丅僗僩乕儖婡峔偲偼丄僷僀僾儔僀儞偺堦帪掆巭婡峔偱偡丅 FPGA撪RAM偩偗傪巊偆尷傝偵偍偄偰偼丄偄偮傾僋僙僗偟偰傕R/W壜擻偱偡偺偱偙偺婡峔偼昁梫偁傝傑偣傫丅乮媽YACC)丂偲偙傠偑丄奜晹僶僗偵偮側偘傞偲側傞偲偙偺婡峔偼昁恵偱偡丅奜晹僶僗偼丄僶僗巊梡幰乮暋悢乯偑僔僃傾傪偟偰巊梡偟傑偡偺偱丄僶僗傾乕價僞偵偍巉偄傪偨偰偰巊梡尃傪妉摼偟偨屻偵弶傔偰巊梡偡傞偙偲偑偱偒傑偡丅傑偨丄巊梡尃傪妉摼偟偰傕丄Req-Ack僴儞僪僔僃乕僋僾儘僩僐儖偵傛傞応崌偵偼丄偄偮Ack偑曉偭偰偔傞偐偼丄暘偐傝傑偣傫丅偙偺曈偼丄僉儍僢僔儏僐儞僩儘乕儔偑傗偭偰偔傟傑偡偑丄CPU偼偦偺娫懸偨偝傟傑偡丅偲偄偆偙偲偱丄僗僩乕儖偼擟堄婜娫偦偺忬懺乮堦帪掆巭忬懺乯傪堐帩偡傞偙偲偑昁梫偵側傝傑偡丅偙偺偲偒堦帪掆巭偝偣傞偺偼丄堦晹偺僷僀僾儔僀儞儗僕僗僞偱偼側偔僷僀僾儔僀儞慡懱偱偁傞偙偲偵拲堄偟傑偡丅乮憱偭偰偄傞5椉曇惉偺揹幵偺堦幵椉偩偗偑掆巭偡傞偙偲偼偱偒側偄偺偲摨偠偙偲偱偡丅乯乭掆巭乭偲偄偆偺偼丄忬懺偑曄傢傜側偄偲偄偆偙偲偱偡偐傜丄忬懺慗堏偑側偄丄偮傑傝尰嵼偺忬懺傪堐帩偡傞偙偲傪慖戰偡傟偽傛偄偙偲偵側傝傑偡丅婎杮揑側僗僩乕儖婡峔偼丄偄傢備傞僗僩僢僾儌乕僔儑儞偺堦宍懺偱偮偓偺傛偆側姶偠偱偡丅儗僕僗僞亄儅儖僠僾儗僋僒偱幚尰偱偒傑偡丅
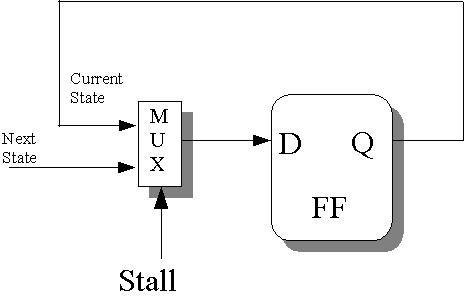
儅儖僠僾儗僋僒偱丄僗僩乕儖偺偲偒偼丄尰忬懺傪慖戰丄僗僩乕儖偱側偄偲偒偼丄師偺忬懺傪僗儖乕偵偡傞夞楬傪峔惉偟傑偡丅
HDL偱彂偄偨椺偲偟偰偼丄師偺傛偆偵側傝傑偡丅僜乕僗傪尒偰偄偨偩偔偲丄僷僀僾儔僀儞傪峔惉偡傞慡儗僕僗僞偵偮偄偰摨條偺婰弎偵側偭偰偄傞偙偲偑暘偐傞偲巚偄傑偡丅乮dstall偑僗僩乕儖巜帵怣崋偱偡丅乯
//僗僥乕僕侾------------------------------------------------------------------------------
//stage 1
//僀儞僗僩儔僋僔儑儞儗僕僗僞
always @(posedge clock) begin
if (sync_reset) IR<=NOP_INSTRUCTION;
else if (dstall);
else if (int_recog) IR<=NOP_INSTRUCTION;
else IR<=ir_out;
end
//僗僥乕僕俀-------------------------------------------------------------------------------
//IR_LR
always @(posedge clock) begin
if (sync_reset) IR_LR<=NOP_INSTRUCTION;
else if (!dstall) IR_LR<=IR;
end
//RegWrite;
always @ (posedge clock) begin
if (sync_reset) rf_write_lr<=0;
else if (dstall);
else
case (opcode_ir)
...
//Sreg
always @(posedge clock) begin
if (sync_reset) Sreg<=0;
else if (!(dstall)) Sreg<=rf_source_out;
end
//Treg
always @(posedge clock) begin
if (sync_reset) Treg<=0;
else if (!dstall) begin
case (A_Right_SELD1)
Imm_signed : Treg<={ {16{IR[15]}},IR[15:0]};
Imm_unsigned : Treg<={ 16'h000,IR[15:0]};
Target_Reg_Output : Treg<=rf_target_out;
IMM_26_SEL: Treg<={6'b00_0000,IR[25:0]};
default : Treg<={ {16{IR[15]}},IR[15:0]};
endcase
end
end
...
丂偮傑傝丄1抜暘偺儅儖僠僾儗僗僒偑抶墑僷僗偵壛嶼偝傟傑偡丅幚嵺弶婜偺MIPS偺愝寁巚憐偼丄僷僀僾儔僀儞僗僩乕儖偑側偄偲偄偆偙偲偑愝寁巚憐偵偁傝傑偡乮MIPS偼丄Microprocessor without Interlocked Pipeline
Stages(僷僀僾儔僀儞僗僥乕僕偑僀儞僞乕儘僢僋偝傟側偄儅僀僋儘僾儘僙僢僒)偺棯乯偑丄偙偺堦抜暘偺抶墑傕惿偟偐偭偨偲偄偆偙偲側偺偱偟傚偆偐丠
忔彍嶼張棟
偲偙傠偱丄柦椷偵埶懚偣偢丄僷僀僾儔僀儞偑忢偵摦偔偐偲偄偆偄偆偲偦偆偱傕偁傝傑偣傫丅嬶懱揑偵偼丄忔彍嶼柦椷偼丄侾CLK偱幚峴偱偒傑偣傫丅僆儕僕僫儖偱偼丄忔彍嶼傪幚峴偝偣丄僷僀僾儔僀儞偼暲楍偵師偺柦椷傪幚峴偟傑偡丅寢壥撉傒弌偟柦椷偑棃偨偲偒偵丄枹偩幚峴拞側傜偦偺偲偒弶傔偰僗僩乕儖偟傑偡丅偙傟偼丄忔彍嶼傪寁嶼拞丄懠偺張棟傪傗傜偣偰廔傢偭偨崰偵寢壥傪廍偍偆偲偄偆堄恾偑偁傞偲巚偄傑偡偑丄偦傫側偵岻偔僐儞僷僀儔偑柦椷傪攝抲偱偒傞栿偱偼側偔戝敿偼丄懸偪偵側偭偰偄傞傛偆偵巚偄傑偡丅偙偙偱偼丄椺奜張棟傪峫偊傞偲丄擄偟偔側傞偨傔偵丄忔彍嶼柦椷帺懱偱僗僩乕儖偝偣傞張棟偲偟傑偡丅傑偨丄僆儕僕僫儖偱偼丄忔彍嶼拞傕妱傝崬傒傪庴晅傑偡偑丄妱傝崬傒偼僗僩乕儖偑夝彍偝傟傞傑偱懸偪偲偡傞巇條偵偟傑偟偨丅丂
| t | IF | RF | ALU | MEM | WF | IF偱忔彍嶼柦椷敪尒 |
| t+1 | IF | RF | ALU | MEM | WF | 師偺柦椷偼Fetch丄忔彍柦椷僗僩乕儖Enable |
| t+2 | IF | RF | ALU | MEM | WF | 慡僗僥乕僕僗僩乕儖丄捈慜柦椷偑ALU墘嶼偺偲偙傠丅忔彍嶼偑捈慜偺墘嶼寢壥傪嶲徠偡傞偨傔丅 |
| t+.. | IF | RF | ALU | MEM | WF | 忔彍柦椷幚峴 |
| t+ | IF | RF | ALU | MEM | WF | 忔彍柦椷廔椆丄僗僩乕儖夝彍 |
椺奜張棟偲妱傝崬傒張棟偼摨偠
T.B.D.
奜晹僶僗偱偺惈擻掅壓傪梷偊傞偵偼僉儍僢僔儏偑昁梫
YACC偼丄僴乕僶乕僪傾乕僉僥僋僠儍偱偁傝丄僾儘僌儔儉傾僋僙僗偲僨乕僞傾僋僙僗偑暘棧丄撈棫偟偰偄傑偟偨丅
偙偺偨傔偵僾儘僌儔儉偲僨乕僞傾僋僙僗偑摨帪偵婲偒偰傕栤戣偁傝傑偣傫偱偟偨丅
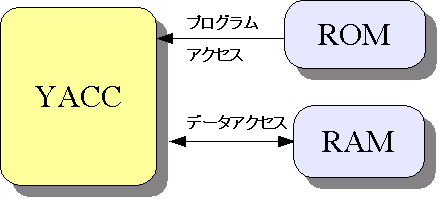
斈梡僶僗乮偨偲偊偽丄Opencores偺Wishbone)傪巊偍偆偲偡傞偲僾儘僌儔儉偲僨乕僞偼丄摨帪偵偼傾僋僙僗偱偒偢壗傜偐偺挷掆婡峔傪帩偭偰帪暘妱偱丄僶僗傪僼僃僢僠偡傞昁梫偑偁傝傑偡丅偙傟偵傛傝CPU偼丄Wait摦嶌傪偡傞偙偲偑昁恵偲側傝丄惈擻掅壓偑尠挊偵側傝傑偡丅傑偨僶僗偺僼僃僢僠偼Req亅Ack偵傛傞僴儞僪僔僃乕僋偵側傞偨傔扨弮側儊儌儕偺ReadCycle偼丄忢偵3CLK傪梫偟偰偟傑偄傑偡丅乮僶乕僗僩傾僋僙僗婡峔偵偮偄偰偼丄崱夞偼愝寁偟傑偣傫丅乯丂偲偄偆偙偲偱丄1/2乣1/6偺惈擻掅壓偑尒崬傑傟傑偡丅斈梡僶僗宍幃傪偲傞偙偲偵傛傝丄IP僐傾乮SDRAM僐儞僩儘乕儔傗Ethernet僱僢僩僐儞僩儘乕儔乯傪愙懕偡傞偙偲偑梕堈側斀柺丄偙偺傑傑偱偼惈擻掅壓偼旔偗傞偙偲偑偱偒傑偣傫丅側傫偲偐惈擻掅壓傪嵟彫偵怘偄巭傔傞曽朄偼側偄偱偟傚偆偐丠
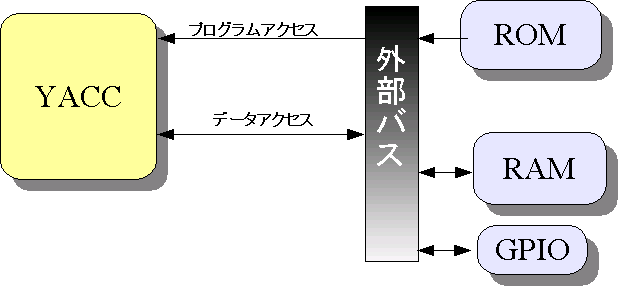
偦偺偨傔偵偼丄僉儍僢僔儏傪摫擖偟傑偡丅CPU偺懁偵僀儞僗僩儔僋僔儑儞偲僨乕僞偺愱梡僉儍僢僔儏傪愝偗傟偽丄彮側偔偲傕Read傾僋僙僗偵偮偄偰偼僉儍僢僔儏偑僸僢僩偡傞尷傝丄崱傑偱偳偍傝撈棫偵傾僋僙僗偑壜擻偱偡丅僉儍僢僔儏偱岎捠偺戝敿傪怘偄巭傔傞偙偲偑偱偒傟偽丄奜晹僶僗偱偺岎捠廰懾傪旔偗傞偙偲偑弌棃傑偡丅僉儍僢僔儏曽幃偼丄嵟傕娙扨側曽朄偱愝寁偟傛偆偲巚偄傑偡偑丄偦傟偱傕丄"偁傝"偲"側偟"偱偼忋偱偺峫嶡偺捠傝丄偐側傝偺惈擻嵎偑梊憐偝傟傑偡丅
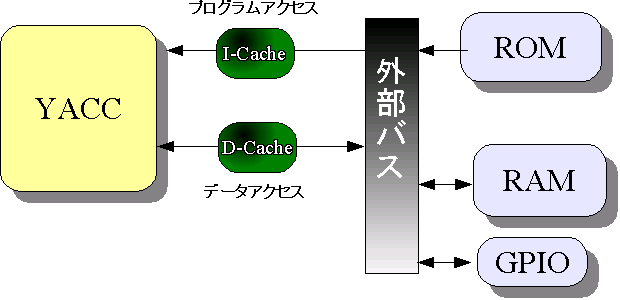
僉儍僢僔儏愝寁巇條
柦椷僉儍僢僔儏丒僨乕僞僉儍僢僔儏巇條
- 2 僂僃僀僙僢僩傾僜僔傾僥傿僽曽幃
- LRU 儕僾儗乕僗儊儞僩傾儖僑儕僘儉
- 柦椷僉儍僢僔儏16KB 僨乕僞俉KB僉儍僢僔儏
- 摉柺丂暔棟僀儞僨僢僋僗丄暔棟傾僪儗僗僞僌丄TLB僒億乕僩屻偼丄壖憐僀儞僨僢僋僗丄暔棟傾僪儗僗僞僌傪梊掕
- 儔僀儞僒僀僘丂4 儚乕僪 (16 僶僀僩)
- 僶乕僗僩儕僼傿儖僒僀僘丂4儚乕僪屌掕
- 僉儍僢僔儏儘僢僋婡擻晅偒乮婡擻ReserveOnly)
忋偺巇條偱愝寁偟偰傒傑偟傚偆丅
亙僉儍僢僔儏柍岠壔椞堟巜掕亜
傑偢丄僉儍僢僔儏柍岠壔椞堟偵偮偄偰偼丄HDL僐儞僷僀儖帪偵巜掕偡傞傕偺偲偟傑偡丅乮僆儕僕僫儖偱偼屌掕壔偝傟偰偄傑偡偑丄尰忬MMU傪旛偊偰偄側偄偺偲丄32價僢僩傾僪儗僗嬻娫偱愝掕偡傞偺傕忕挿側偺偱丅乯IO椞堟偱偼丄摨偠傾僪儗僗傪R/W偟偰傕摨偠抣偑曉偭偰偔傞偲偼尷傝傑偣傫丅偮傑傝僉儍僢僔儏偼巊偊傑偣傫丅偦偙偱偦偺傛偆側椞堟偼丄僉儍僢僔儏偑夘嵼偣偢丄CPU亅僶僗娫偱傾僋僙僗傪峴偆傛偆偵偟傑偡丅
亙儕僼傿儖傾儖僑儕僘儉亜
儔僀僩僶僢僋億儕僔乕Only偲偟傑偡偑丄儔僀僩僶僢僋丒儕僼傿儖偼娙扨偺偨傔丄扨偵SingleR/W儖乕僠儞傪屇傃弌偡巇條偲偟傑偡丅傑偨丄娙扨偺偨傔丄儔僀僩梡FIFO傕旛偊傑偣傫丅
僉儍僢僔儏偺忬懺偐傜峫偊傑偟傚偆丅儕僙僢僩帪偼丄僉儍僢僔儏偺忬懺偼晄掕偱Invalid偵側傝傑偡丅Invalid忬懺偐傜偺Read偼丄忢偵僉儍僢僔儏儈僗偲側傝丄傑偢丄Stall傪CPU偵巜帵偟傑偡丅偦偺偁偲丄奜晹僶僗偺曽傪岦偄偰儕僼傿儖偟傑偡丅儕僼傿儖屻偼Clean側忬懺偵側傝傑偡丅
Invalid忬懺偱偺Write偼丄忢偵Write儈僗偲側傝丄儕僼傿儖屻偵僉儍僢僔儏儔僀僩偟Dirty忬懺偵側傝傑偡丅偙偺偲偒奜晹儊儌儕偺彂偒栠偟乮儔僀僩僶僢僋乯偼丄峴偄傑偣傫丅儔僀僩僶僢僋偼丄Dirty忬懺偱偺僉儍僢僔儏儈僗帪偺傒峴偄僉儍僢僔儏儈僗偟偨傾僪儗僗偱偺LRU憖嶌丄儔僀僩僶僢僋丄儕僼傿儖摦嶌偲偡傞僔乕働儞僗傪嶌傝傑偡丅偦偺娫丄CPU偵懳偟偰偼丄僗僩乕儖傪堐帩偟丄儕僼傿儖屻偵Stall傪夝彍偟丄嵟屻偵梫媮R/W摦嶌傪姰椆偟傑偡丅乮CPU偼偦偺娫丄懸偨偝傟傞偺偱丄杮棃偼僶乕僗僩揑偵奜晹傾僋僙僗偟偨偄偲偙傠偱偡丅乯
側偍丄僀儞僗僩儔僋僔儑儞僉儍僢僔儏偵偮偄偰偼ReadOnly偱偡偐傜丄乮帺屓彂偒姺偊偼晄壜偲偡傞巇條乯Dirty忬懺偼懚嵼偟傑偣傫丅Data僉儍僢僔儏偺傒偑儔僀僩僶僢僋偱偒傞巇條偲偟傑偡丅
僉儍僢僔儏僸僢僩帪偼丄Stall傪傾僒乕僩偟側偄偱偦偺傑傑R/W偟傑偡丅
丂埲忋偐傜丄僉儍僢僔儏偺忬懺偲偟偰
- Invalid忬懺
- Clean忬懺
- Dirty忬懺
偑懚嵼偟傑偡丅忬懺傪慗堏偝偣傞忦審偲偟偰偼丄
- reset
- write_req_fm_cpu
- read_req_fm_cpu
- cache_hit
偑偁傝傑偡丅偙傟傜偱丄儊僀儞儖乕僠儞乮儊僀儞僔乕働儞僒乯傪峔惉偟傑偡丅
傑偨task偲偟偰
- 儕僼傿儖摦嶌
- 儔僀僩僶僢僋摦嶌
偑偁傝丄偙傟傜偼丄儊僀儞儖乕僠儞偐傜偺巜帵傪庴偗偰丄stb_o 傗丄cycle丄we_o傪惗惉偟丄ack_i傪庴偗庢傞僒僽僔乕働儞僒偵側傝傑偡丅
偙偺曈偼僜僼僩揑側僒僽儖乕僠儞傪HW偱幚憰偡傞傛偆側姶偠偱偡偹丅丂寢峔暋嶨側僗僥乕僩儅僔儞偵側傞偐傕偟傟傑偣傫丅
憐掕偡傞奜晹僶僗巇條
丂偲傝偁偊偢Opencores偺Wishbone丂偺min.巇條傪憐掕偟傑偡丅Section3.1.3偵婎杮揑側僴儞僪僔僃乕僋偺僾儘僩僐儖偑嵹偭偰偄傑偡丅扨弮側REQ-ACK偱偡丅
YACC偼丄擇偮偺Master億乕僩傪帩偪奜晹儊儌儕乮SDRAM僐儞僩儘乕儔乯偼丄SLAVE偲偟傑偡丅挷掆偼丄Wishbone僶僗僐儞僩儘乕儔偵偍婅偄偡傞偙偲偵偟偰丄擇偮偺Master偼丄撈棫偵摦嶌偝偣傑偡丅乮偍屳偄偺偙偲偼娭抦偟傑偣傫丅Wishbone僶僗僐儞僩儘乕儔偵偍擟偣偱偡丅乯
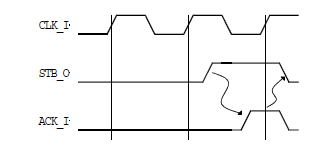
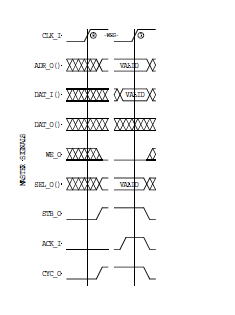
丂偙傟偱偡偲丄嵟傕懍偔偰俀CLK/1僶僗僒僀僋儖偵側傝傑偡偹丅偪側傒偵師偼8價僢僩GPIO偺Minimum丂Slave偺椺偱偡偑丄師偺傛偆偵娙扨偱偡丅

偟偐偟丄FPGA偺摨婜RAM偺Read偼丄傾僪儗僗傪搉偟偨師偺僋儘僢僋偱偟偐ACK偼曉偣側偄偨傔偵丄偝傜偵傕偆侾僶僗僒僀僋儖偑昁梫偵側傝傑偡丅SDRAM僐儞僩儘乕儔偺SLAVE偱偼丄摉慠僶乕僗僩僆儁儗乕僔儑儞僾儘僩僐儖傪巊偄偨偄偲偙傠偱偡偑丄崱夞偼愝寁偟傑偣傫丅(僒僽僔乕働儞僒傪屻偱抲偒姺偊傟偽傛偄偱偟傚偆丅懠偺僶僗偵偮側偘傞偲偒傕僒僽僔乕働儞僒晹暘偺彂偒姺偊偱懳墳偡傞偙偲偵偟傑偟傚偆丅乯
亙僞僌RAM巇條亜
僨乕僞僞僌RAM
- 2 bit x 256 words
- 22 bit x 256 words x2
| Cache Status | Way 0 | Way 1 | ||||||
| Address | LRU | Lock | Valid | Dirty | Phy [31:12] | Valid | Dirty | Phy [31:12] |
| 0 | ||||||||
| ... | ||||||||
| ... | ||||||||
| ... | ||||||||
| ... | ||||||||
| 255 | ||||||||
Lock偼丄Reserve偺傒偱婡擻偼幚憰偟偰偄傑偣傫丅LRU偼丄cache偵僸僢僩偟側偐偭偨偲偒丄Replace偝傟傞Way傪帵偟傑偡丅
Valid偼丄1偱Vailid丄0偱Invalid傪帵偟PowerOn 帪侽偱丄cache偑儕僼傿儖偝傟偨偲偒偵1偵側傝傑偡丅Dirty偼丄堦搙偱傕儔僀僩偝傟傞偲侾偵側傝傑偡丅儕僼傿儖偝傟傞偲0(clean)偵側傝傑偡丅弶婜抣偼丄FPGA偺Default偺弶婜壔侽傪慜採偵偟偰偄傑偡丅
僀儞僗僩儔僋僔儑儞僞僌RAM
- 2 bit x 512 words
- 21 bit x 512 words x2
| Cache Status | Way 0 | Way 1 | ||||||
| Address | LRU | Lock | Valid | Reserve | Phy [31:13] | Valid | Reserve | Phy [31:13] |
| 0 | ||||||||
| ... | ||||||||
| ... | ||||||||
| ... | ||||||||
| ... | ||||||||
| 511 | ||||||||
僀儞僗僩儔僋僔儑儞僉儍僢僔儏 (big endian only)
8bit x2048 words x4(bytes/word) x2(way)
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| 0 | [31:24] | [23:16] | [15:8] | [7:0] | [31:24] | [23:16] | [15:8] | [7:0] | [31:24] | [23:16] | [15:8] | [7:0] | [31:24] | [23:16] | [15:8] | [7:0] |
| 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | |
| 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | |||||||||
| 511 | 127 | 2044 | 2044 | 2044 | 2047 | 2047 | 2047 | 2047 |
僨乕僞僉儍僢僔儏 (big endian only)
8bit x1024 words x4(bytes/word)x2(way)
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | |
| 0 | [31:24] | [23:16] | [15:8] | [7:0] | [31:24] | [23:16] | [15:8] | [7:0] | [31:24] | [23:16] | [15:8] | [7:0] | [31:24] | [23:16] | [15:8] | [7:0] |
| 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | |
| 4 | 4 | 4 | 4 | 5 | 5 | 5 | 5 | |||||||||
| 255 | 127 | 1020 | 1020 | 1020 | 1023 | 1023 | 1023 | 1023 |
亙僉儍僢僔儏傾儖僑儕僘儉亜
嬶懱揑側僉儍僢僔儏傾儖僑儕僘儉偼埲壓偱偡丅
if( VIRTUAL ADDRESS(TLB僒億乕僩帪丄尰嵼偼Phy乯偑旕僉儍僢僔儏椞堟側傜){
丂 旕僉儍僢僔儏僔乕働儞僗
}else if (僉儍僢僔儏僸僢僩側傜){
丂 埲壓偺僉儍僢僔儏僸僢僩僔乕働儞僗傪嬱摦丂僶僗僒僀僋儖側偟
丂 僉儍僢僔儏偵偨偄偟偰R/W,奜晹僶僗偵偼傾僋僙僗偟側偄
丂丂 write => dirty bit 傪ON偵偡傞
丂丂read => dirty bit 偼偦偺傑傑
丂 LRU 儅乕僋傪status 偵彂偒崬傒
}else {
丂 assert (僉儍僢僔儏儈僗);
丂 LRU selection
丂 if (invalid || clean) 儕僼傿儖->僉儍僢僔儏僸僢僩僔乕働儞僗
丂 else {
丂 assert (dirty);
丂 儔僀僩僶僢僋->儕僼傿儖 ->僉儍僢僔儏僸僢僩僔乕働儞僗
}
}
懠偺僶僗偵堏怉偡傞応崌偼丄旕僉儍僢僔儏僔乕働儞僗丄儔僀僩僶僢僋僔乕働儞僗丄儕僼傿儖僔乕働儞僗傪抲偒姺偊傟偽傛偄偱偡丅
嬶懱揑側HDL僐乕僪偼師偱偡丅
//僗僥乕僩掕媊
localparam [1:0] HitState=2'b00 , //儊僀儞僔乕働儞僒僗僥乕僩掕媊
NonCacheDomain=2'b01,
CacheRefil=2'b10,
CacheWriteBack=2'b11;
localparam[1:0] Idles=2'b00, //旕僉儍僢僔儏椞堟僗僥乕僩掕媊
StallState=2'b01,
StallMaskState=2'b11;
localparam [1:0] Idlew=2'b00, //儔僀僩僶僢僋僗僥乕僩掕媊
WriteStrobe=2'b01,
WriteAckReceived=2'b11,
WriteBackFinished=2'b10;
localparam [1:0] Idler=2'b00, //儕僼傿儖僗僥乕僩掕媊
ReadStrobe=2'b01,
ReadAckReceived=2'b11,
ReadFillFinished=2'b10;
//僗僥乕僩儅僔儞僼儕僢僾僼儘僢僾s
reg [1:0] cache_seq;
reg [1:0] non_cache_domain_seq;
reg [1:0] refill_seq;
reg [1:0] writeback_seq;
儊僀儞僔乕働儞僒偺僐乕僪偱偡丅
//儊僀儞僔乕働儞僒僗僥乕僩儅僔儞
always @(posedge clock) begin
if (sync_reset) cache_seq<=0;
else if ( !mul_div_stall )
case (cache_seq)
HitState: if (non_cache_domain ) cache_seq<=NonCacheDomain;
else if (!cache_hit && (cache_write | cache_read) ) begin
if (!lru_valid || !lru_dirty) cache_seq<=CacheRefil;
else cache_seq<=CacheWriteBack;
end
NonCacheDomain: if (non_cache_domain_seq==StallMaskState && !non_cache_domain ) cache_seq<=HitState;
CacheRefil: if (refill_seq==ReadFillFinished) cache_seq<=HitState;
CacheWriteBack: if (writeback_seq==WriteBackFinished) cache_seq<=CacheRefil;
endcase
end
儔僀僩僶僢僋僔乕働儞僗偱偡丅
//儔僀僩僶僢僋僔乕働儞僒僗僥乕僩儅僔乕儞
reg [2:0] writeback_data_counter;
localparam integer Limit_Count=4;//儔僀僩僶僢僋扨埵偼4儚乕僪乮儚乕僪扨埵偼係Byte乯
always @(posedge clock) begin
if (sync_reset) writeback_seq <=Idlew;
else
case (writeback_seq)
Idlew:if (cache_seq==CacheWriteBack) writeback_seq<=WriteStrobe;
WriteStrobe: if (ack_fm_ext ) writeback_seq<= WriteAckReceived;
WriteAckReceived: if (!ack_fm_ext ) begin
if (writeback_data_counter <Limit_Count) writeback_seq<=WriteStrobe;
else writeback_seq<= WriteBackFinished;
end
WriteBackFinished: writeback_seq <=Idlew;
endcase
end
儕僼傿儖僔乕働儞僗偱偡丅
//儕乕僪僼傿儖僔乕働儞僒僗僥乕僩儅僔乕儞
reg [2:0] read_data_counter;
always @(posedge clock) begin
if (sync_reset) refill_seq <=Idlew;
else
case (refill_seq)
Idler:if (cache_seq==CacheRefil) refill_seq<=ReadStrobe;
ReadStrobe: if (ack_fm_ext ) refill_seq<= ReadAckReceived;
ReadAckReceived: if (!ack_fm_ext ) begin
if (read_data_counter <Limit_Count) refill_seq<=ReadStrobe;
else refill_seq<= ReadFillFinished;
end
ReadFillFinished: refill_seq <=Idler;
endcase
end
旕僉儍僢僔儏僔乕働儞僗偺僐乕僪偱偡
//旕僉儍僢僔儏椞堟僔乕働儞僒
always @(posedge clock) begin
if (sync_reset) non_cache_domain_seq<=Idles;
else if( !mul_div_stall )
case (non_cache_domain_seq)
Idles: if (non_cache_domain) non_cache_domain_seq<=StallState;
StallState: if (ack_fm_ext) non_cache_domain_seq<=StallMaskState;
StallMaskState: if (non_cache_domain) non_cache_domain_seq<=StallState;
else non_cache_domain_seq<=Idles;
default: non_cache_domain_seq<=Idles;
endcase
end
Wishbone 僶僗僐儞僩儘乕儔 僶僗傾乕價僞偼丄Opencores丂Conbus IP傪巊梡偟傑偡丅Priority偼愝掕偱偒傑偣傫丅扨弮側儔僂儞僪儘價儞偱偮偓偺僜乕僗偑偦偺僄僢僙儞僗偱偡丅
僨僶僢僌拞偺條巕偱偡丅ScopeView偱conbus 偵丄Wishbone偺傾乕價僞丄Slave偲偟偰偺奜晹RAM乮壖憐儌僨儖乯丄 YACC偺擇偮偺僉儍僢僔儏億乕僩乮Master)偑愙懕偟偰偄傞偙偲偑暘偐傝傑偡丅Wishbone僐儞僩儘乕儔偑丄Master偺僶僗妉摼梫媮傪庴偗偰RoundRobin偱儅僗僞乕傪愗傝懼偊偰偔傟偰偄傑偡丅
RAM偺Wishbone愙懕儌僨儖偼丄Openrisc偺偦傟傪巊偭偰偄傑偡丅僶僗暆偼摨偠32價僢僩側偺偱偡偑丄僶僀僩傾僋僙僗儌僨儖偑堘偆偺偱彮偟夵憿偑昁梫偱偡丅 偪側傒偵Openrisc偺僉儍僢僔儏偼僟僀儗僋僩儅僢僾偱偡丅乮偳偆偟偰LRU偵偟側偐偭偨偺偐偼暘偐傝傑偣傫丅 Microblaze傕僟僀儗僋僩儅僢僾丄儔僀僩僗儖乕偱偡偟丄摿嫋偺娭學偑偁傞偺偐傕偟傟傑偣傫丅偙偺曈偼枹偩屚傟偰偄側偄椞堟偩偲巚偄傑偡丅乯
偲偙傠偱丄Microblaze偺榖偑弌偨偺偱丄僀儞僗僩儔僋僔儑儞僼僅乕儅僢僩偵偮偄偰堦尵丅僆儕僕僫儖偺僼僅乕儅僢僩偼3僞僀僾偵暘偐傟傑偡丅嵟弶偺R-Type偼丄墘嶼宯偱丄椺偊偽丄
R1<=R2+R3;
偺俁崁墘嶼偱偡丅師偺Itype偼丄懄抣Type偱偡丅32價僢僩偺懄抣偼丄2柦椷偺儅僋儘柦椷偵側傝傑偡丅嵟屻偼丄僕儍儞僾Type偱偡丅柦椷偼偙偺3偮偺偳傟偐偵擖傝傑偡偺偱丄僨僐乕僪偑旕忢偵娙扨偱偡丅忋偺儅僀僋儘僾儘僌儔儉CPU偲傕帡偨僼僅乕儅僢僩偱偡丅
R-Type:
| 31-26 | 25-21 | 20-16 | 15-11 | 10-6 | 5-0 |
| opcode (000000) | rs | rt | rd | shamt | funct |
I-Type
| 31-26 | 25-21 | 20-16 | 15-0 |
| opcode | rs | rt | immed. |
J-Type
| 31-26 | 25-0 |
| opcode | target |
堦曽丄Microblaze偼丄偙偺帒椏偵傛傞偲師偺傛偆偵側偭偰偄傑偡丅側傫偐帡偰偄傑偡偹丅嵟弶偼丄僷僀僾儔僀儞傕3抜偩偭偨偺偱偡偑丄嵟嬤偺偼5抜偵側偭偰偄傑偡丅
| 0-5 | 6-10 | 11-15 | 16-20 | 21-31 | |
| opcode | rd | rsA | rsB | ||
| 0-5 | 6-10 | 11-15 | 16-31 |
| opcode | rd | rs | immed. |
YACC偐傜丄曄峏偡傞偺傕偦傫側偵擄偟偄偙偲偱偼側偄偱偟傚偆丠乮昅幰偵偦偺傛偆側堄恾傗寁夋偼偁傝傑偣傫丅乯
壓偼丄僾儘僌儔儉儖乕僾偱摨偠偲偙傠傪傾僋僙僗偟偰偄傞偺偱偡偑丄僉儍僢僔儏偑僸僢僩偡傞偲丄奜晹RAM偵偼傾僋僙僗偟偵峴偐側偔側傞偙偲偑暘偐傝傑偡丅偦傟偵偟偰傕丄僸僢僩偟側偄偲僴儞僪僔僃乕僋偱丄傗傝偲傝偡傞偺偱儁僫儖僥傿偼戝偒偄偱偡丅
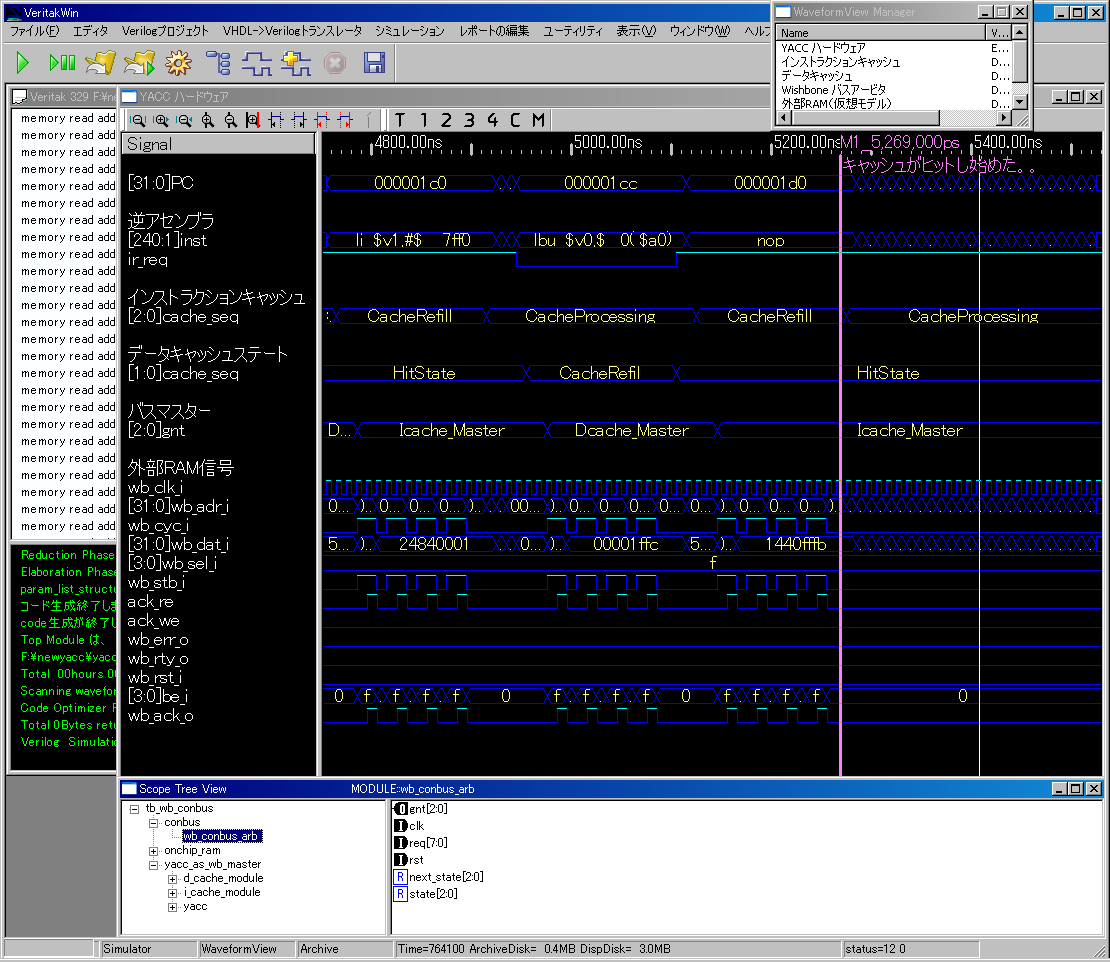
僉儍僢僔儏偺惈擻應掕
僪儔僀僗僩乕儞儀儞僠偱偺僉儍僢僔儏梕検偲懍搙斾偺應掕寢壥偱偡丅僪儔僀僗僩乕儞偼丄16KB傕偁傟偽丄僾儘僌儔儉僨乕僞嫟廂傑偭偰偟傑偆埵偵彫偝偄儀儞僠偱偡丅乮僪儔僀僗僩乕儞儀儞僠偼丄僷僢働乕僕偵偁傞丄僾儘僌儔儉拞偺帋峴夞悢傪1000夞幚峴偟偨寢壥偱偡丅僕儍儞僾偺柍懯SLOT偑側偄暘丄媽YACC傛傝丄10-20%MIPS偼崅偔側偭偰偄傑偡丅乯偟偐偟丄2KB埲崀丄懍搙岦忋偼尒傜傟傑偣傫丅(巼乯丂堦曽晜摦彫悢揰墘嶼MAC乮僄儞僕乯偺曽偼丄64KB埲忋偁傞僾儘僌儔儉偱偡偑丄16KB埲忋偱傕懍搙岦忋偟偦偆側婥攝偱偡丅側偍丄偙偙偱偄偆僉儍僢僔儏梕検偼僨乕僞僉儍僢僔儏丄僀儞僗僩儔僋僔儑儞僉儍僢僔儏奺乆偺抣偱偡丅
丂
CPU僔儈儏儗乕僞傪嶌傞
丂
丂崱傑偱丄CPU僔儈儏儗乕僞偼巊梡偟偰偍傝傑偣傫偱偟偨丅偟偐偟丄怓乆側堄枴偱CPU僔儈儏儗乕僞偼偁偭偨曽偑傛偄偱偡丅戞堦偵丄攇宍晅RTL僔儈儏儗乕僞偺30攞偼懍偄偺偱丄RTL僨僶僢僌偺儕僼傽儗儞僗偲偟偰巊偊傑偡丅栤戣偑偁偭偨傜丄寢壥傪斾妑偟偰栤戣帪崗売強傪峣傝崬傒傑偡丅偙偙偱偄偆寢壥斾妑偲偼丄PC偲儊儌儕偵懳偡傞撉傒彂偒僨乕僞偱偡丅乮儗僕僗僞偵偮偄偰偼丄僷僀僾儔僀儞偺Delay偑偁傝傑偡偺偱丄昁偢偟傕堦抳偟偨寢壥偵偼側傝傑偣傫丅(NOP偑悢僋儘僢僋懕偄偨屻偱偼堦抳偟傑偡丅)乯屻偼丄WaveformViewer忋偱丄栤戣帪崗廃曈偺RTL摦嶌傪僠僃僢僋偟偰僨僶僢僌偟傑偡丅
嶌傞偲尵偭偰傕丄愭恖偑嶌偭偨傕偺偑偁傝傑偡偺偱丄偦傟傪棙梡偟傑偡丅偨偩偟丄YACC偼丄傑偩TLB曄姺傪僒億乕僩偟偰偄側偄偺偲丄IO嬻娫丄椺奜妱傝崬傒娭學偼丄YACC撈帺偺嬻娫掕媊偵偟偰偄傑偡丅偦偺曈偼丄夵憿偟側偗傟偽偄偗傑偣傫丅CPU偺摦偒傪僔儈儏儗乕僩偟偰偔傟傞傕偺偱偁傟偽丄側傫偱傕傛偄偺偱偡偑悢偁傞僔儈儏儗乕僞 乮偙偙偵傕偁傝傑偡乯丂偐傜丄夵憿偟傗偡偄傕偺傪慖傃傑偡丅慖掕偺梫揰偼丄
- 僜乕僗偑岞奐偝傟偰偄傞丄儔僀僙儞僗偑曄峏傪嫋偟偰偄傞
- 偲傝偁偊偢丄YACC偼丄價僢僌僄儞僨傿傾儞側偺偱價僢僌僄儞僨傿傾儞偺傕偺
- ELF宍幃乮幚峴宍幃僼傽僀儖乯偑撉傒崬傔傞丂乮桳柤側SPIM偼撉傒崬傔側偄乯
- C傑偨偼丄C++偱婰弎偝傟偰偄傞乮偙傟偼丄昅幰偺搒崌乯
埲忋傪峫椂偟偰丄YAMS偲偄偆僔儈儏儗乕僞偺僜乕僗傪棙梡偝偣偰偄偨偩偔偙偲偵偟傑偟偨丅
埲壓偼丄娙扨側C僾儘僌儔儉偱偺幚峴椺偱偡丅
夵憿屻偺YAMS偵傛傞僔儈儏儗乕僔儑儞偱偡丅DOS憢偵弌椡偟偰偄傑偡丅
摨偠C僾儘僌儔儉傪RTL僔儈儏儗乕僔儑儞偟偨條巕偱偡丅
YAMS偺僼傽僀儖弌椡偱偡丅
0 PC= 0 IR=3c1c0000 : LUI $gp, 0
1 PC= 4 IR=379cef30 : ORI $gp, $gp, ef30
2 PC= 8 IR=3c040000 : LUI $a0, 0 R[28]=ef30
3 PC= c IR=348470e4 : ORI $a0, $a0, 70e4
4 PC= 10 IR=3c050000 : LUI $a1, 0 R[ 4]=70e4
5 PC= 14 IR=34a570f8 : ORI $a1, $a1, 70f8
6 PC= 18 IR=3c1d001f : LUI $sp, 1f R[ 5]=70f8
7 PC= 1c IR=37bdff00 : ORI $sp, $sp, ff00 R[29]=1f0000
8 PC= 20 IR=ac800000 : SW $zero, 0 ($a0) R[29]=1fff00
Store_Long adr= 70e4 data= 0
9 PC= 24 IR= 85182a : SLT $v1, $a0, $a1
10 PC= 28 IR=1460fffd : BNE $v1, $zero, 18 R[ 3]=1
11 PC= 2c IR=24840004 : ADDIU $a0, $a0, 4
12 PC= 20 IR=ac800000 : SW $zero, 0 ($a0) R[ 4]=70e8
Store_Long adr= 70e8 data= 0
13 PC= 24 IR= 85182a : SLT $v1, $a0, $a1
14 PC= 28 IR=1460fffd : BNE $v1, $zero, 18
15 PC= 2c IR=24840004 : ADDIU $a0, $a0, 4
16 PC= 20 IR=ac800000 : SW $zero, 0 ($a0) R[ 4]=70ec
Veritak偺僼傽僀儖弌椡偱偡丅
0 PC=00000000 IR=00000000
1 PC=00000004 IR=3c1c0000
2 PC=00000008 IR=379cef30
3 PC=0000000c IR=3c040000
4 PC=00000010 IR=348470e4
5 PC=00000014 IR=3c050000
6 PC=00000018 IR=34a570f8
7 PC=0000001c IR=3c1d001f
8 PC=00000020 IR=37bdff00
9 PC=00000024 IR=ac800000
10 PC=00000028 IR=0085182a
Store_Long addr=000070e4 data=00000000
11 PC=0000002c IR=1460fffd
12 PC=00000020 IR=24840004
13 PC=00000024 IR=ac800000
14 PC=00000028 IR=0085182a
Store_Long addr=000070e8 data=00000000
偙傟偼丄CPU僜乕僗拞丄師偺僜乕僗偵傛傞弌椡偱偡丅
`define DEBUG
`ifdef DEBUG
integer fi;
`ifdef REFERENCE_SIM
initial fi=$fopen("pc_file_ref.txt","w");
`else
initial fi=$fopen("pc_file.txt","w");
`endif
initial debug1.counter=0;
reg [31:0] load_address_ir,load_address_ir_lr,load_address_ir_a;
always @(posedge clock) begin:debug1
integer counter;
integer i;
if (~dstall & pre_rw_access) load_address_ir_lr<=pre_mem_addr;
if(!dstall) load_address_ir_a<=load_address_ir_lr;
if (!dstall ) begin
$fdisplay(fi,"%6d PC=%8h IR=%8h ",counter,PC,IR);
counter<=counter+1;
`ifdef REG_DEBUG_OUT
for (i=0;i<=31;i=i+1) begin
$fwrite(fi,"R[%02h]=%h ",i,ram_regfile32xx32.mem[i]);
end
$fdisplay(fi,"");
`endif
end
if (mem_write_req && !dstall) begin
if (opcode_ir_lr==StoreByte ) $fdisplay(fi,"Store_Byte addr=%8h data=%2h",load_address_ir_lr,data_to_mem[7:0]);
else if (opcode_ir_lr==StoreWord ) $fdisplay(fi,"Store_Word addr=%8h data=%4h",load_address_ir_lr,data_to_mem[15:0]);
else $fdisplay(fi,"Store_Long addr=%8h data=%8h",load_address_ir_lr,data_to_mem[31:0]);
end
if (mem_read_req && !dstall) begin
if (opcode_ir_a==LoadByteSigned ||
opcode_ir_a==LoadByteUnsigned ) $fdisplay(fi,"Load_Byte addr=%8h data=%2h",load_address_ir_a,data_to_mem[7:0]);
else if (opcode_ir_a==LoadWordSigned ||
opcode_ir_a==LoadWordUnsigned
) $fdisplay(fi,"Load_Word addr=%8h data=%4h",load_address_ir_a,data_to_mem[15:0]);
else $fdisplay(fi,"Load_Long addr=%8h data=%8h",load_address_ir_a,data_to_mem[31:0]);
end
end
`endif
僪儔僀僗僩乕儞儀儞僠偺嵟屻傑偱峴偭偨偲偙傠偱偡丅嵍偑Veritak弌椡丄塃偑CPU僔儈儏儗乕僞弌椡偱偡丅
Veritak偺曽偼丄IR偑侾Clock抶傟丄Store偑2Clock抶傟丄Load偑3Clock抶傟偱堦抳偟偰偄傑偡丅娙扨偵偼廏娵偺乭摨帪僗僋儘乕儖乭偱尒斾傋偰傕傛偄偱偡偟丄栜榑丄僗僋儕僾僩摍偱丄僼傽僀儖傪僐儞儁傾偟偰傕傛偄偱偡丅
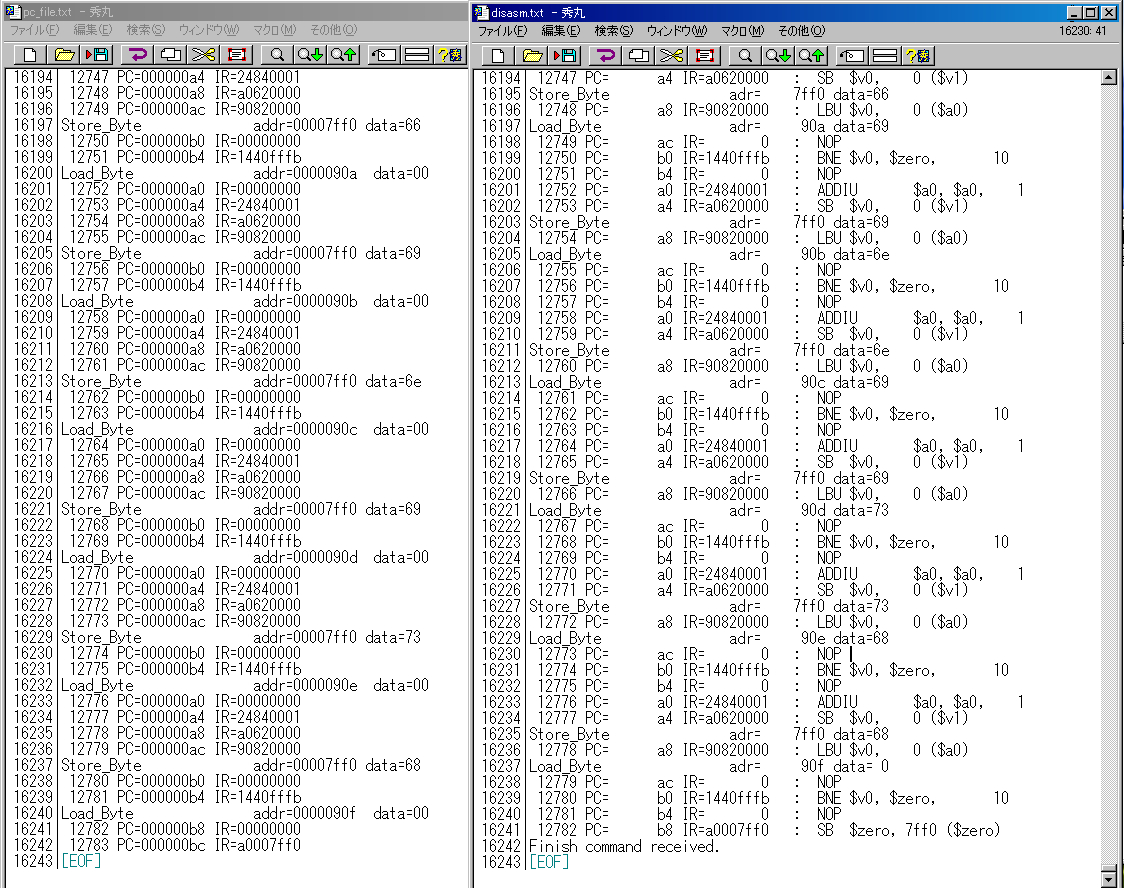
摿偵丄戝偒側C僾儘僌儔儉偱乽摦偐側偄乿偲偒偵埿椡傪敪婗偡傞嫮椡側僣乕儖偵側傞敜偱偡丅乮岾偄傑偩偍悽榖偵側偭偰偄傑偣傫丅乯
printf 傪幚憰偟偰傒傞
傾僪儗僗嬻娫偑戝偒偄偲乮4GB偁傝傑偡偑丄偲傝偁偊偢僔儈儏儗乕僔儑儞娐嫬偼2MB偵偟偰偄傑偡丅乯儊儌儕愡栺姶妎偼側偔側傝偮偮偁傝丄彮偟恀柺栚側printf偑梸偟偔側傝傑偡丅慻傒崬傒梡OS偱偼丄戝掞晜摦彫悢昞帵偼旕僒億乕僩側偺偱嶲峫偵側傞僜乕僗偑偁傑傝側偐偭偨偺偱偡偑丄ReactOS娭學偱偁傝傑偟偨丅桳擄偔堏怉偝偣偰偄偨偩偒傑偟偨丅
C僾儘僌儔儉偼偙傫側姶偠偱丄晜摦彫悢傕彂幃巜掕偑偱偒傑偡丅
void main()
{
unsigned long i;
double d,d1;
d=9.03033e2;
for (i=0;i<10;i++){
d *=2.304371e-1;
printfy("i=%3d Exp. Disp:d=%4.9e Floating Disp:d=%3.7f\n",i,d,d);
}
print("$finish");
}
CPU僔儈儏儗乕僞偼丄偙傫側晽偵弌椡偟傑偡丅僗僞僢僋億僀儞僞偼丄2MB-0x100斣抧偵愝掕偟偰偄傑偡丅CPU僔儈儏儗乕僞忋偱偼丄僉儍僢僔儏偺懚嵼偼塭嬁偟傑偣傫丅
RTL僔儈儏儗乕僔儑儞偺條巕偱偡丅僉儍僢僔儏傪摦偐偟偰偄傑偡丅
僼傽僀儖偺擖弌椡傪峫偊傞
彮偟戝偒側僾儘僌儔儉傪摦偐偦偆偲偡傞偲僼傽僀儖傪撉傒彂偒偟偨偔側傝傑偡丅偨偲偊偽丄BMP夋憸傪撉傒崬傫偱丄JPG夋憸傪弌椡偝偣偨偄丄偲偟偨傜偳偆偡傟偽傛偄偱偟傚偆偐丠側傫偲偐OS側偟偵僼傽僀儖傪撉傒彂偒偟偨偄偱偡丅
偙偙偱偼丄壖憐偵側傝傑偡偑丄傗偼傝億乕僩傪扏偄偰僼傽僀儖傪擖弌椡偝偣傞偙偲傪峫偊傑偡丅
僀儞僞乕僼僃乕僗偼丄CPU僐傾偱峴偆偙偲偵偟傑偟偨丅
malloc/free 傪幚憰偡傞
傗偼傝丄彮偟戝偒側僾儘僌儔儉傪摦偐偦偆偲偡傞偲昁梫偵側傝傑偡丅偙傟傕側傫偲偐偟傑偟傚偆丅梋択偱偡偑丄malloc偼墱偑怺偔Veritak偱傕Run-Time僄儞僕儞偼帺嶌偺malloc斉傪巊偭偰偄傑偡丅乮prex偺僇乕僱儖晹偺幚憰傕嶲峫偵側傝傑偡丅prex偼丄偄偮偐億乕僩偟偨偄偱偡偹丅乮儕僩儖僄儞僨傿傾儞偵彂偒姺偊側偄偲..乯乯偙偙偱偼丄屆揟揑丒斈梡揑側K&R斉傪巊偄傑偟偨丅
malloc偲僼傽僀儖擖弌椡偵娭偡傞僒儞僾儖偱偡丅
malloc/free/printf/fopen/fputc/fwrite/fgetc/fread/memcpy/memset.. 摍偼丄YACC偵愱梡偺傕偺傪僿僢僟僼傽僀儖偱屇傃弌偡昁梫偑偁傝傑偡丅巊偄曽偼丄昗弨C偲戝懱摨偠偱偡偑庒姳堘偄傑偡丅乮巊偄曽偼僷僢働乕僕拞偺僜乕僗傪挱傔偰偔偩偝偄丅乯摿偵拲堄偡傞揰偼丄malloc傪巊偆嵺偼丄堦搙偩偗弶婜壔偑昁梫側揰偱偡丅
#include "yacc_port.h"
#include "printy.h"
#include "malloc.h"
#include "fopen.h"
char buf[400];
char src_buf[100]="This is a Pen.\n Thanks a lot!\n ";
void main(void)
{ int fi,ch,i;
unsigned char* read_ptr;
unsigned bytes;
void *heap_start;
unsigned size;
fi=fopen("first.txt","wb");
for (i=0;i<sizeof(src_buf);i++){
if (!src_buf[i]) break;
fputc(fi,src_buf[i]);
}
fclose(fi);
memset(buf,sizeof(buf),0);
fi=fopen("first.txt","rb");
i=0;
ch=fgetc(fi);
while (ch!=EOF){
buf[i++]=ch;
ch=fgetc(fi);
}
printf("Read text=%s",buf);
fclose(fi);
printf("Reading BMP file..\n");
heap_start=HEAP_START;
size=(PHYSICAL_MAX-STACK_SIZE-HEAP_START);
MallocInit(heap_start,size);
read_ptr=malloc(400*1000);
printf("read_ptr=%x",read_ptr);
fi=fopen("cmain.bmp","rb");
bytes=fread(read_ptr,1,400*100,fi);
fclose(fi);
printf("Done bytes=%d\n",bytes);
fi=fopen("cmain_copy.bmp","wb");
bytes=fwrite(read_ptr,1,bytes,fi);
fclose(fi);
printf("Done Copy\n");
free(read_ptr);
print("$finish");
}
幚憰偺拞恎偼丄偄偨偭偰娙扨偱偡丅乮偦傟偵偟偰傕C偺僿僢僟僼傽僀儖偲RTL偺億乕僩偺掕媊傪嫟桳乮儊儞僥乯偟偨偄偲巚偆偺偼巹偩偗偱偟傚偆偐丠乯
int fopen(const char* file_name,const char* rw)
{
unsigned ch;
unsigned *ptr;
ASSERT(rw);
ASSERT(file_name);
if (!strcmp(rw,"w")|| !strcmp(rw,"wb")) ptr=FILE_NAME_WRITE_PORT_ADDRESS;
else ptr=FILE_NAME_READ_PORT_ADDRESS;
while (*file_name){
ch=*(file_name++);
*(volatile unsigned *)ptr=ch ;
}
*(volatile unsigned *)ptr=0 ;//Write zero as string end mark.
ch=*ptr;
if (ch ==EOF) {
printf("file open error\n");
print("$finish");
}
ASSERT(ch >=MIN_FILE_DESCRIPTOR &&
ch <=MAX_FILE_DESCRIPTOR);
return ch;
}
inline int fputc(int file_descriptor, unsigned char ch){
unsigned *ptr=FILE_IO_START+file_descriptor*4;
*(volatile unsigned *)ptr=(unsigned)ch ;
return 0;//Sorry,No check
}
inline int fgetc(int file_descriptor){
unsigned ch;
// ASSERT(file_descriptor >=MIN_FILE_DESCRIPTOR &&
// file_descriptor <=MAX_FILE_DESCRIPTOR);
unsigned *ptr=FILE_IO_START+file_descriptor*4;
ch=*ptr;
return ch;//
}
void fclose(int file_descriptor){
ASSERT(file_descriptor >=MIN_FILE_DESCRIPTOR &&
file_descriptor <=MAX_FILE_DESCRIPTOR);
unsigned *ptr=FILE_IO_START+file_descriptor*4;
*(volatile unsigned *)ptr=(unsigned)EOF ;
}
unsigned fread(unsigned char *buf, unsigned size_per_word, unsigned words, int fp)
{
unsigned bytes;
unsigned i;
unsigned c;
bytes=words* size_per_word;
for (i=0;i<bytes;i++){
c=fgetc(fp);
if (c==EOF){
return i;
}
buf[i]=c;
}
return bytes;
}
unsigned fwrite(unsigned char *buf, unsigned size_per_word, unsigned words, int fp)
{
unsigned bytes=size_per_word* words;
unsigned i;
for (i=0;i<bytes;i++){
fputc(fp,buf[i]);
}
return bytes;//Sorry, no check!
}
RTL懁偼丄壖憐億乕僩偱偡丅億乕僩偺儔僀僩乮printf摍乯偼丄彂偒偭傁側偟側偺偱戝偟偨偙偲偼側偄偺偱偡偑丄億乕僩偺儕乕僪(fgetc摍乯偼丄彮偟岺晇偑梫傝傑偡丅壖憐偺億乕僩側偺偱丄嬄乆偟偔僴乕僪僂僃傾傪彂偒偨偔偼偁傝傑偣傫丅傗傝偨偄偙偲偼丄僉儍僢僔儏偐傜CPU偵曉偡僶僗傪墶庢傝偟偰抣傪曉偟偰傗傟偽傛偄偩偗偱偡丅墶庢傝傪偳偆彂偗偽傛偄偐偲偄偆偲丄force/release傪巊偄傑偡丅乮force/release
偼丄僔儈儏儗乕僞偺儕僜乕僗傪怘偆偟抶偔側傞偺偱懡梡偼旔偗偨偄偺偱偡偑丄偙偙偼偟傚偆偑側偄偱偡乯
//壖憐僼傽僀儖億乕僩
reg [0:8*100-1] file_name_buffer;
integer file_name_char_counter=0;
//fopen屻偺僼傽僀儖僨傿僗僋儕僾僞傪曐帩偟偰師偺Read偱曉偡
integer last_file_descriptor=`MIN_FILE_DESCRIPTOR-1;
//幚僼傽僀儖僨傿僗僋儕僾僞傪曐帩
integer file_descriptors[`MIN_FILE_DESCRIPTOR:`MAX_FILE_DESCRIPTOR];
//儘乕僇儖曄悢
integer i;
integer index_offset;
integer fi;
integer char;
integer forced_flag=0;
always @ (posedge clock ) begin : Virtual_FIle
if ((mem_write_req === 1'b1) && ! (ir_stall || to_dcache_wait_req || dstall) ) begin
if (mem_addr_d==`FILE_NAME_WRITE_PORT_ADDRESS ||
mem_addr_d==`FILE_NAME_READ_PORT_ADDRESS ) begin//僼傽僀儖僱乕儉億乕僩儔僀僩傾僋僙僗
if (data_fm_cpu[7:0]===8'h00) begin //LONG 傾僋僙僗
file_name_buffer[file_name_char_counter*8 +:8]=data_fm_cpu[7:0];
if (mem_addr_d==`FILE_NAME_READ_PORT_ADDRESS)begin
fi=$fopen(file_name_buffer,"rb");
end else fi=$fopen(file_name_buffer,"wb");
if (fi) begin
last_file_descriptor=last_file_descriptor+1;
if (last_file_descriptor>`MAX_FILE_DESCRIPTOR) begin
$display("Excessive max files."); $finish;
end
file_descriptors[last_file_descriptor]=fi;
end else begin
$display("can not open %s",file_name_buffer) ;
$finish;
end
for (file_name_char_counter=0; file_name_char_counter< 100; file_name_char_counter=file_name_char_counter+1) begin
file_name_buffer[file_name_char_counter*8 +:8]=8'h00;
end
file_name_char_counter=0;
end else begin
file_name_buffer[file_name_char_counter*8 +:8]=data_fm_cpu[7:0];
file_name_char_counter=file_name_char_counter+1;
end
end else if ( mem_addr_d >= `FILE_IO_PORTS &&
mem_addr_d < (`FILE_IO_PORTS +4*`NUM_OF_FILE_DESCRIPTORS)) begin//僼傽僀儖IO億乕僩儔僀僩傾僋僙僗
index_offset=$unsigned(mem_addr_d-`FILE_IO_PORTS+4*`MIN_FILE_DESCRIPTOR)>>2;
if (!file_descriptors[index_offset]) begin
$display("file_error");
$stop;
$finish;
end
fi=file_descriptors[index_offset];
if (data_fm_cpu ==`EOF)begin
$fclose(fi);//EOF 傪彂偐傟偨傜fclose偡傞巇條
end else $fputc(fi,data_fm_cpu[7:0]);//
end
end //if write
end //always
always @ (negedge clock ) begin//force /release 傪妋幚偵偡傞偨傔偵敿CLOCK偢傜偡
if (forced_flag && ! (ir_stall || to_dcache_wait_req || dstall) ) begin
release data_to_cpu;
forced_flag=0;
end
if ((mem_read_req === 1'b1) && ! (ir_stall || to_dcache_wait_req || dstall) ) begin
if (mem_addr_dd==`FILE_NAME_WRITE_PORT_ADDRESS ||
mem_addr_dd==`FILE_NAME_READ_PORT_ADDRESS ) begin//僼傽僀儖僱乕儉億乕僩儔僀僩傾僋僙僗
force data_to_cpu=last_file_descriptor;
forced_flag=1;
end else if ( mem_addr_dd >= `FILE_IO_PORTS &&
mem_addr_dd < (`FILE_IO_PORTS +4*`NUM_OF_FILE_DESCRIPTORS)) begin//僼傽僀儖IO億乕僩儔僀僩傾僋僙僗
index_offset=$unsigned(mem_addr_dd-`FILE_IO_PORTS+4*`MIN_FILE_DESCRIPTOR) >>2;
if (!file_descriptors[index_offset]) begin
$display("file_error");
$stop;
$finish;
end
fi=file_descriptors[index_offset];
char=$fgetc(fi);
force data_to_cpu=char;
forced_flag=1;
end
end //if read
end
RTL僔儈儏儗乕僔儑儞寢壥偱偡丅
CPU僔儈儏儗乕僔儑儞寢壥偱偡丅
Cygwin娐嫬偱偺GNU C僐儞僷僀儔偺峔抸
傑偢偼丄昁梫側僜乕僗僐乕僪傪僟僂儞儘乕僪偟傑偡丅崱夞偼丄
binutils 偑2.16丄GCC偑4.1.2,newlib偑1.15.0偺慻傒崌傢偣偱價儖僪偟傑偟偨丅偦傟埲奜偺慻傒崌傢偣偱偼幐攕偡傞偐傕偟傟傑偣傫丅
- binutils http://www.gnu.org/software/binutils/ 丂
- GCC http://www.gnu.org/software/gcc/gcc.html
- newlib http://sources.redhat.com/newlib/
庤弴偲偟偰偼丄binutils偱傾僙儞僽儔傪峔抸丄GCC偺僐儞僷僀儖傪峴偄丄弌棃忋偑偭偨GCC偱newlib傪峔抸偡傞俁僗僥僢僾偺庤弴偵側傝傑偡丅巹偺娐嫬偱偼丄堦擔埲忋偐偐傝傑偟偨丅乮僐儞僷僀儖僄儔乕偺弌側偄慻偁傢偣傪扵偡嶌嬈傕娷傫偱偄傑偡丅乯丂昁梫側EXE僼傽僀儖偼僷僢働乕僕偱傾僢僾偟傑偡偺偱丄姼偊偰價儖僪偡傞昁梫偼偁傝傑偣傫丅
億僀儞僩偼丄僄儞僨傿傾儞偺巜掕偲soft-float偺巜掕偺擇偮偱偡丅僄儞僨傿傾儞偼丄mips-elf
傪慖戰偡傞偲價僢僌僄儞僨傿傾儞偵側傝傑偡丅傑偨configure 偱--without fp
傪巜掕偡傞偲soft-float 傪惗惉偟偰偔傟傑偡丅乮偙傟偑側偄偲fpu乮僐僾儘僙僢僒侾乯偺柦椷傪惗惉偟偰偟傑偆偺偱摦偒傑偣傫丅乯
壓偱偼丄儊僀儞偺Directory壓偵俁偮偺Directory傪嶌傝偦偺壓偱僐儞僷僀儖傪峴偭偰偄傑偡丅
Step侾 Build binutils
% tar xjfv binutils-2.16.tar.bz2 % mkdir build-binutils % cd build-binutils % export TARGET=mips-elf % export PREFIX=/usr/local/$TARGET % export PATH=$PATH:$PREFIX/bin % ../binutils-2.16/configure --target=$TARGET --prefix=$PREFIX % make % make install
側偤偐丄僗僋儕僾僩偩偲偆傑偔偄偐側偐偭偨偺偱丄僉乕儃乕僪傪扏偄偰擖椡偟傑偟偨丅傾僙儞僽儔偼usr/local/mips-elf/bin
壓偵弌棃偰偄傑偡丅
Step2. Build GCC
忋偺僷僗愝掕偑惗偒偨忬懺偱嶌嬈偟傑偡丅configure 傪娫堘偊偨偲偒偼丄build-gcc(嶌嬈椞堟乯偺撪梕傪徚嫀偟偰嵞幚峴偟傑偡
% tar xjfv gcc-4.1.2.tar.bz2 % mkdir build-gcc % cd build-gcc % ../gcc-4.1.2/configure --without-fp --with-newlib --with-headers=../newlib-1.15.0/newlib/libc/include --enable-languages="c++" --target=$TARGET --prefix=$PREFIX % make % make install
偙傟偱GCC偑弌棃忋偑傝傑偟偨丅乮梸挘偭偰C++傑偱擖傟偰傒傑偟偨丅乯
Step3. Build newlib
newlib 偼慻傒崬傒梡偺C儔僀僽儔儕偱偡丅忋偺僷僗愝掕偑惗偒偨忬懺偱嶌嬈偟傑偡丅
% tar xzfv newlib-1.15.0.tar.gz % mkdir build-newlib % cd build-newlib % ../newlib-1.15.0/configure --without-fp --target=$TARGET --prefix=$PREFIX % make % make install
埲忋偱僐儞僷僀儔偺峔抸廔椆偱偡丅
堦偮偺栤戣
忋婰僐儞僷僀儔偱丄-msoft-float 僗僀僢僠偱僐儞僷僀儖偡傞偲soft float 偺柦椷傪惗惉偟偰偔傟傑偡丅
偑丄栤戣偑偁傝傑偡丅
YACC偼丄愭払偵廗偄,僷僥儞僩偵側偭偰偄傞柦椷(lwr,lwr,swr,swl)傪幚憰偟偰偄傑偣傫丅乮plasma
傗丄yellow star傕摨條偱偡丅栜榑丄偙傟傪夞旔偟偨偐傜偲偄偭偰丄10枩審偁傞偲尵傢傟傞CPU偺僷僥儞僩偵懳偟丄僷僥儞僩僼儕乕偲偄偆偙偲偱偼偁傝傑偣傫丅帺屓愑擟偵偰偍婅偄偟傑偡丅)丂偲偙傠偑丄忋婰僐儞僷僀儔偼惗惉偟偰偟傑偄傑偡丅僆僾僔儑儞僗僀僢僠傕尒偨偺偱偡偑丄巆擮側偑傜偦偺傛偆側僗僀僢僠偼偁傝傑偣傫偱偟偨丅堦偮偺埬偲偟偰偼丄枹掕媊柦椷偱椺奜傪敪惗偝偣偰僴乕僪揑偵僜僼僩張棟偝偣傞庤偑偁傝傑偡偑擄偟偦偆側偺偱丄僽乕僩僗僩儔僢僾偺僼傽僀儖傪偄偠偭偰僐儞僷僀儔偑惗惉偟側偄傛偆偵偟傑偟偨丅
偄偠傞僼傽僀儖偼GCC偺僜乕僗拞丄
- mips.h
- mips.c
- mips.md
偱偡丅偙傟傜偼僷僢働乕僕偵娷傑傟傑偡丅
傕偆堦偮偺栤戣
偦傟偱傕丄惗惉偝傟偨媡傾僙儞僽儖儕僗僩傪尒傞偲丄枹偩擖偭偰偄傑偟偨丅偳偆傗傜丄libc拞偺memcpy偱丄巊傢傟偰偄傑偡丅memcpy.c偼丄堦晹傾僙儞僽儔偱彂偐傟偰偄傑偟偨丅乮偦偺懠偵偼側偄傛偆偱偡丅乯丂偙傟偵偮偄偰偼丄帺暘偱彂偄偨memcpy傪儕儞僋偝偣傞偙偲偵偟傑偟偨丅
C僐儞僷僀儔傪巊偭偰傒傞-cpu偲僉儍僢僔儏偺専徹
- Hello丂World両
- 娙扨側僾儘僌儔儉丂
- 慺悢
- 兾
僜乕僗偼丄埲壓偺悢峴偱偡丅c=56偲2800偺擇偮偺Version偑偁傝弌椡偡傞寘悢偑堘偄傑偡丅c=2800偺曽偼丄800寘弌椡偲側傝RTL傕帪娫偑偐偐傝傑偡丅
include "yacc_port.h"
#include "printy.h"
#include "malloc.h"
//long a=10000,b,c=56,d,e,f[57],g;
long a=10000,b,c=2800,d,e,f[2801],g;
void main()
{
for(;b-c;)f[b++]=a/5;for(;d=0,g=c*2;c-=14,printf("%d",e+d/a),e=d%a)for(b=c;d+=f[b]*a,f[b]=d%--g,d/=g--,--b;d*=b);
print("$finish");
}
- 兾晜摦彫悢斉
C僜乕僗偱偡丅
#include "yacc_port.h"
#include "printy.h"
#include "malloc.h"
void main(void)
{
short i;
double x, y1, y2, pi;
double dx = 1.0; /* 晜摦彫悢揰悢偺弶婜壔偵偼彫悢揰傪晅偗傞 */
printf("pi calculation by integral method.");
for (i = 0; i < 2; i++) {
pi = 0.0; /* pi 偲 y1 偼丄偙偙偱弶婜壔偡傞 */
y1 = 1.0; /* y1 = 0.0 偲側偭偰偄偨偺傪丄掶惓 */
dx /= 10; /* 儖乕僾傪夞傞搙偵 dx 偼 1/10 偵側傞 */
for (x = 0.0; x <= 1.0 - dx; x += dx) { /* x < 1.0 - dx; 偲側偭偰偄偨偺傪丄掶惓 */
y2 = sqrt(1 - (x + dx) * (x + dx));
pi += (y1 + y2) * dx / 2; /* 戜宍偺柺愊傪媮傔傞 */
/* 寁嶼偱媮傔偨 y2 偺抣傪 y1 偵戙擖偟 */
y1 = y2; /* 師偺儖乕僾偱傕偆堦搙巊偆 */
}
/* dx 偲 pi 偺抣傪昞帵 */
printf("dx = %7.5f\tPi = %10.8f\n", dx, pi * 4.0);
}
print("$finish");
}
CPU僔儈儏儗乕僞弌椡偱偡丅
RTL僔儈儏儗乕僔儑儞偱偡丅
- 儕乕僪僜儘儌儞
丂(225,223)儕乕僪僜儘儌儞偱偡丅僀儗乕僕儍10売強丄掶惓侾侾売強偺僄儔乕傪偮偔傝丄岆掶惓偑側偄偙偲傪妋擣偟偰偄傑偡丅
- 揹戩
flex 偲bison 傪巊偭偰揹戩傪慻傫偱傒傑偟傚偆丅
傑偢偼丄惍悢偺懌偟嶼偲堷偒嶼偩偗掕媊偟傑偡丅
僷乕僒(bison)偺掕媊僼傽僀儖偱偡丅暥朄偺僄僢僙儞僗偼statement偺偲偙傠偩偗偱偡丅暤埻婥偼傢偐傞偲巚偄傑偡丅
%{
#include <stddef.h>
#include <stdarg.h>
#include "yacc_port.h"
#include "fopen.h"
#include "printy.h"
extern int yylex(void);
extern void yyerror(const char*msg);
%}
%union {
int dec_val;
}
%token <dec_val> DEC_VAL
%%
statement :
DEC_VAL '+' DEC_VAL { printf("YACC Answer:%d+%d=%d\n",$1,$3,$1+$3); }
| DEC_VAL '-' DEC_VAL 丂丂{ printf("YACC Answer:=%d-%d=%d\n",$1,$3,$1-$3); }
;
%%
void compile(const char* path)
{
if(!reset_lexor(path)){
printf("can not open %s",path);
return ;
}
int rc = yyparse();
}
僗僉儍僫(flex)偺掕媊僼傽僀儖偱偡丅[0-9]+丂偱惍悢傪愗傝弌偟偰偄傑偡丅flex
偑惗惉偡傞僼傽僀儖偼丄stdio.h丂傪偳偆偟偰傕娷傫偱偟傑偄傑偡丅偦偙偱丄惗惉偝傟偨lexor.c
偼丄YACC梡偵悢峴彂偒姺偊傑偡丅
//#include <stdio.h> //#include <errno.h> #include <limits.h> #include <ctype.h> #include <stdarg.h> #include <string.h> #include "yacc_port.h" #include "printy.h" #include "malloc.h" #include "fopen.h"
%{
unsigned line_no=1;
#include "parse.h"
void yyerror(const char *);
#define YY_NEVER_INTERACTIVE 1
void yy_fatal_error_yacc( const char* msg );
#define YY_INPUT(buf,result,max_size) result=fread(buf, 1, max_size, yyin)
#define YY_FATAL_ERROR(msg) yy_fatal_error_yacc( msg )
%}
%%
[0-9]+ { yylval.dec_val=atoi(yytext);
return DEC_VAL;
}
[}{;:\[\],()#=.@&!?<>%|^~+*/-] {
return yytext[0]; }
\n {
line_no++;
}
. { }
%%
int yywrap()
{
return 1;
}
void yy_fatal_error_yacc( const char* msg )
{
printf("Error:%s\n",msg);
}
void yyerror(const char *msg)
{
printf("Error:%s (%d)\n",msg,line_no);
}
int reset_lexor(const char * path)
{
yyin = fopen(path, "r");
if (yyin) return 1;
else return 0;
}
屻偼丄儊僀儞偐傜僷乕僒傪屇傇偩偗偱偡丅
char name[]="calc_test1.txt";
void main()
{
compile(name);
print("$finish");
}
僥僉僗僩僼傽僀儖偐傜寁嶼幃傪撉傒庢傝寁嶼寢壥傪弌椡偟傑偡丅
僥僉僗僩僼傽僀儖偼
9871+12342121
偱偡丅
偪傖傫偲寁嶼偟偰偔傟傑偟偨丅偦傟偱偼丄偙偺揹戩傪奼挘偟偰偄偒傑偟傚偆丅
傑偢偼丄忔彍嶼掕媊傪捛壛偟傑偟傚偆丅僷乕僒偩偗偺曄峏偱嵪傒傑偡丅%left偺掕媊弴偵墘嶼桪愭搙偑忋偑傝傑偡
%token <dec_val> DEC_VAL
%type <dec_val> expr primary
%left '+' '-'
%left '*' '/' '%'
%%
statement :
expr { printf(" YACC Answer=%d",$1);}
;
expr:
primary 丂丂 { $$=$1; }
| expr '+' expr { $$=$1 +$3; }
| expr '-' expr { $$=$1 -$3; }
| expr '*' expr { $$=$1*$3;}
| expr '/' expr { $$=$1/$3;}
;
primary: DEC_VAL { $$=$1;}
;
%%
寁嶼幃偺擖椡僼傽僀儖偱偡丅
寢壥偱偡丅
傕偆彮偟奼挘偟偰傒傑偟傚偆丅妵屖傪偮偗偨偔側傝傑偟偨丅偙傟傕僷乕僒偵嬐偐側捛壛偱嵪傒傑偡
%token <dec_val> DEC_VAL
%type <dec_val> expr primary
%left '+' '-'
%left '*' '/' '%'
%%
statement :
expr { printf(" YACC Answer=%d",$1);}
;
expr:
primary { $$=$1; }
| expr '+' expr { $$=$1 +$3; }
| expr '-' expr { $$=$1 -$3; }
| expr '*' expr { $$=$1*$3;}
| expr '/' expr { $$=$1/$3;}
;
primary:
DEC_VAL { $$=$1;}
| '(' expr ')' { $$=$2; }
;
偡傞偲埲壓偺寁嶼傕偟偰偔傟傞傛偆偵側傝傑偡丅
師偼丄偄偔偮偐偺寁嶼傪傑偲傔偰峴偄偨偄偲偟傑偡丅偙傟偼僗僥乕僩儊儞僩偑暋悢偵側偭偨偲峫偊傑偡丅偦偺偨傔偵偼丄僗僥乕僩儊儞僩偺嬫愗傝偑昁梫偵側傝傑偡丅偙偙偱偼丄嬫愗傝傪亖偲偟傑偟偨丅偙傟傕埲壓偺傛偆偵嬐偐側僷乕僒捛壛偩偗偱弌棃傑偡丅
%union {
int dec_val;
}
%token <dec_val> DEC_VAL
%type <dec_val> expr primary
%left '+' '-'
%left '*' '/' '%'
%%
statements :
statement
| statements statement
;
statement :
expr '=' { printf(" YACC Answer=%d\n",$1);}
;
expr:
primary { $$=$1; }
| expr '+' expr { $$=$1 +$3; }
| expr '-' expr { $$=$1 -$3; }
| expr '*' expr { $$=$1*$3;}
| expr '/' expr { $$=$1/$3;}
;
primary:
DEC_VAL { $$=$1;}
| '(' expr ')' { $$=$2; }
;
%%
擖椡僼傽僀儖偱偡丅
丒挻娙扨僀儞僞乕僾儕僞
丂忋偺揹戩偺墑挿偱愝寁偟偰傒傑偟傚偆丅挻娙扨巇條偱偡丅
丂
- 曄悢偼丄a-z 傑偱偱丄弶婜抣0
- a=a+b+3*3-4*c; 摍偑偱偒傞
- print a+b-3; 偑偱偒傞
尷傝側偔揹戩偵嬤偄偱偡丅偙傟側傜30暘偱弌棃傑偡偹丅
傑偢偼丄巇條偺暘愅偱偡丅
- 愰尵暥偼丄側偟丄曄悢偼慡偰static 偱a-z傑偱帩偰偽傛偄=>int 攝楍丄丂峔暥夝愅偺慜偵弶婜壔
- 僗僥乕僩儊儞僩偼2庬椶丂曄悢丂'=' expression ';'
- print expression';'
- expression丂偼丄忋婰揹戩傪巊偊偽傛偄丅
- print 偲 曄悢偼僗僉儍僫捛壛
偲偄偭偨偙偲偑晜偐傃傑偡丅偁偲偼丄僷乕僒偲儗僉僒乮僗僉儍僫乯傪偪傚偭偲偄偠傟偽傛偄偩偗偱偡丅
僷乕僒偱偡丅
#define VAR_MAX 256
int var[VAR_MAX];
%}
%union {
int dec_val;
unsigned char ident;
}
%token <dec_val> DEC_VAL
%token <ident > IDENTIFIER
%token PRINT_K
%type <dec_val> expr primary
%left '+' '-'
%left '*' '/' '%'
%%
statements :
statement
| statements statement
;
statement :
IDENTIFIER '=' expr ';' { var[$1-'a']=$3; }
| PRINT_K expr ';' { printf("YACC Answer=%d\n",$2); }
;
expr:
primary { $$=$1; }
| expr '+' expr { $$=$1 +$3; }
| expr '-' expr { $$=$1 -$3; }
| expr '*' expr { $$=$1*$3;}
| expr '/' expr { $$=$1/$3;}
;
primary:
DEC_VAL { $$=$1;}
| IDENTIFIER { $$=var[$1-'a']; }
| '(' expr ')' { $$=$2; }
;
%%
void compile(const char* path)
{
int i;
if(!reset_lexor(path)){
printf("can not open %s",path);
return ;
}
for (i=0;i<VAR_MAX;i++) var[i]=0;
int rc = yyparse();
}
儗僉僒偱偡丅
%%
[0-9]+ { yylval.dec_val=atoi(yytext);
return DEC_VAL;
}
[}{;:\[\],()#=.@&!?<>%|^~+*/-] {
return yytext[0]; }
[a-z] { yylval.ident=yytext[0]; return IDENTIFIER;}
"print" { return PRINT_K;}
\n {
line_no++;
}
. { }
%%
僀儞僞乕僾儕僞偺擖椡偱偡

寢壥偱偡丅
僷乕僒偲儗僉僒偵偮偄偰傒傑偟偨丅娙扨側暥朄側傜Bison/Flex偩偗偱僷乕僒偺杦偳偑偱偒偰偟傑偄傑偡丅帠幚丄Verilog1995偵偮偄偰偼丄杦偳偙傟偱彂偗偰偄傑偡丅僷乕僗偼丄慡懱傪鋜傔傞偲偄偆姶偠偱偟傚偆偐丠丂崱夞偼丄挻娙扨僀儞僞乕僾儕僞側偺偱丄僷乕僒偩偗偱慡偰偑彂偗傑偟偨丅偙傟傛傝戝偒偄婯柾偱偼丄堄枴夝愅丄Elaboration,拞娫僐乕僪惗惉丄僐乕僪惗惉偲偄偆僗僥乕僕偑屻懕偟傑偡丅僀儞僞乕僾儕僞偲偄偆偺偼丄僐儞僷僀儔偑弌棃偰弶傔偰嶌傞偙偲偑偱偒傑偡丅僐儞僷僀儔偑弌棃側偄偆偪偵僀儞僞乕僾儕僞傪嶌傞偙偲偼偱偒傑偣傫丅
偙偺忔傝偱丄帺暘愱梡偺僗僋儕僾僩尵岅傪彂偄偰傒傞偺傕柺敀偄偐傕偟傟傑偣傫丅
- c2html
http://www.geocities.jp/team_zero_three/丂偺src2html 偐傜丄桳擄偔僜乕僗傪偄偨偩偄偰偒傑偟偨丅C僜乕僗傪html偵偟偰偔傟傑偡丅僼傽僀儖娭學偼僶僀僫儕僆乕僾儞偟偐幚憰偟偰偄側偄偺偱丄彮偟僜乕僗傪廋惓偟偰懳墳偟傑偟偨丅RTL僔儈儏儗乕僞偑惗惉偟偨廋惓屻偺html僜乕僗偱偡丅
丂偮偄偱偵VerilogHDL傕怓偮偒偵偟偰傒傑偟傚偆丅RTL僔儈儏儗乕僞偑惗惉偟偨怴偟偄YACC偺CPU僐傾晹僜乕僗偱偡丅乮嵟怴偱偼偁傝傑偣傫丅乯丂偙偺弌椡偵偼
11暘偐偐傝傑偟偨丅YACC傕帺暘偺僜乕僗傪帺暘偱弌椡偟偰偔傟傞傛偆偵側偭偰姶奡怺偄偱偡丅乮傑偩僔儈儏儗乕僞忋偱偡乯
- JPEG幚尡
http://www.sweetcafe.jp/丂僒僀僩偐傜丄cjpeg.c 偲偄偆僼傽僀儖傪捀偄偰偒傑偟偨丅偙傟偼丄價僢僩儅僢僾傪jpeg偵曄姺偡傞僜僼僩偱偡丅乮偛帺恎偱verilog偵傛傞jpeg僐傾傪岞奐偝傟偰偄傑偡丅乯偙偺僜乕僗偼丄峔憿懱傾僋僙僗丄晜摦彫悢丒惍悢奺庬墘嶼偑怐傝岎偤偰偁傝丄CPU偲僉儍僢僔儏偺僠僃僢僋傪偡傞偵偼丄挌搙傛偄偱偡丅CPU僔儈儏儗乕僞偱偼悢暘丄Veritak崅懍儌乕僪偱2-3帪娫夞偡偲傗偭偲彫偝偄BMP僼傽僀儖偑曄姺偝傟偰JPEG僼傽僀儖偑弌棃忋偑傝傑偟偨丅CPU僔儈儏儗乕僞偑揻偄偨儘僌僼傽僀儖偼5GB偱偟偨偺偱丄偝偡偑偵僐儞儁傾偡傞婥偵偼側傟傑偣傫丅CPU僔儈儏儗乕僞偺JPEG僼傽僀儖偲RTL僔儈儏儗乕僞偺JPEG僼傽僀儖傪僶僀僫儕僐儞儁傾傪偲偭偰OK偟傑偟偨丅
僥僗僩偵巊偭偨價僢僩儅僢僾僼傽僀儖偱偡丅偳偙偐尒妎偊偑偁傝傑偡偹丅
![]()
Veritak偑揻偄偨JPEG僼傽僀儖偱偡丅
![]()
強姶
CPU偲僉儍僢僔儏偺専徹傪峴偆偺偵丄揔摉側C傪摦偐偟偨偐偭偨偺偱偡偑丄傗偼傝OS偑摦偔慜偵C傪摦偐偡偵偼stdio.h廃傝傪搵嵹偟側偄偲摦偄偰偔傟側偄傕偺偑戝敿偱偁傝丄偦偺偨傔偺儔僀僽儔儕嶌惉偵帪娫傪庢傜傟傑偟偨丅懡暘僴乕僪傪彂偄偰偄傞帪娫傛傝傕挿偐偭偨偲巚偄傑偡丅僽乕僩僗僩儔僢僾偼傗偭傁傝C偐傜巒傑傞偙偲傪幚姶偟傑偟偨丅儅僋儘掕媊偺奀丄壜撉惈偺埆偄僐乕僪丄恖偼偦傟傪拞悽偺庺暥偲偄偆偺偐傕偟傟傑偣傫丅偟偐偟丄嶌嬈傪傗傝側偑傜丄偦傟側偟偵偼丄C++傕JAVA丄偦偺懠丄岼偵堨傟傞尵岅偼懚嵼偟側偐偭偨丂偲偄偆偙偲傪恎偵偟傒偰姶偠傑偟偨丅愄偺恖偼執偐偭偨偺偱偡偹丅
榑棟崌惉
僽儘僢僋偺崌惉乮CPU僐傾扨懱偺傒乯
RTL 僔儈儏儗乕僔儑儞偑戝懱廔傢偭偨偺偱丄帋偟偵CPU扨懱偺傒Virtex5偱崌惉偟偰傒傑偟偨丅乮偦傟偵偟偰傕崌惉偼丄抶偄偱偡偹乯
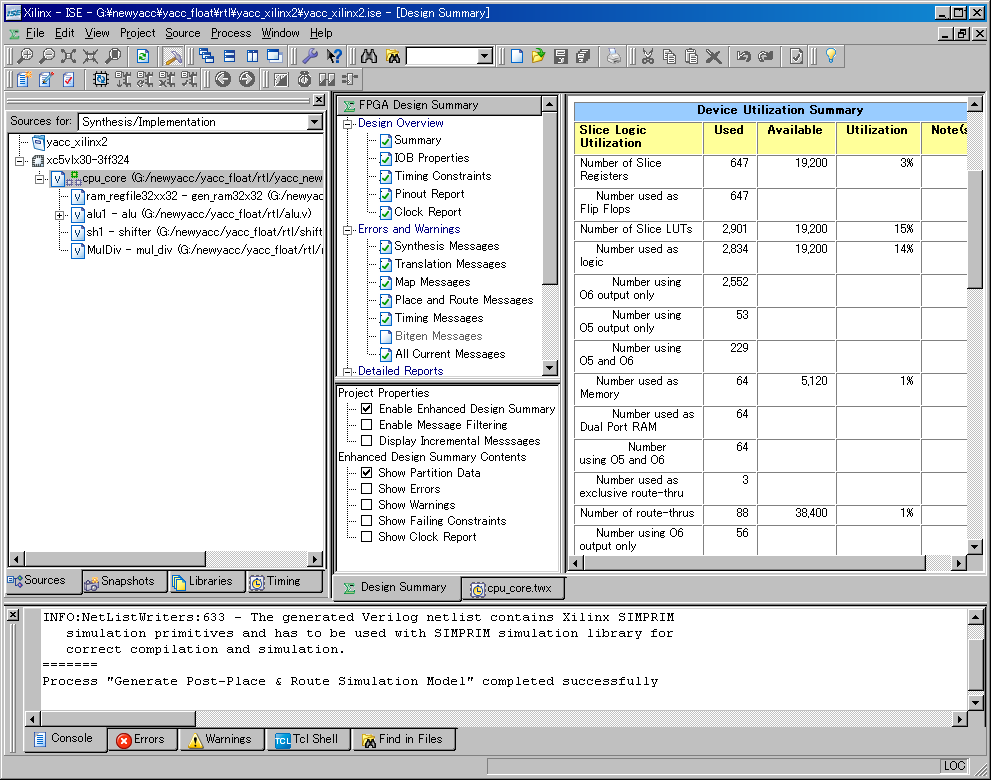
懍搙偼丄俉倶MH倸偱偟偨丅Stratix2偱傕俇倶MH倸側偺偱丄梊憐埲忋偵埆偄偱偒偱偡丅媽斉YACC偱Stratix2偱165MHz偱偟偨偐傜丄僼儖32價僢僩偲偄偆忦審傪妱傝堷偄偰傕丄傗偼傝抶墑僷僗傪嵟弶偐傜堄幆偟偨愝寁偲偦偆偱側偄傕偺偺嵎偼丄戝偒偄偙偲偑暘偐傝傑偡丅
抶墑偺僱僢僋偼丄僕儍儞僾偵偐偐傢偭偰偄傑偡丅媽斉YACC偱偼丄DelayedSLOT傪3偲偟偨棟桼偑偙偙偵偁傝傑偡丅偮傑傝僕儍儞僾柦椷傪媇惖偵偟偰懍搙傪忋偘偰偄偨偺偱偡丅崌惉慜偺摨偠廃攇悢偱斾妑偡傞偲怴偟偄YACC偺曽偑MIPS抣偼10%-20%掱搙崅偔側傞偺偱偡偑丄嵟戝嬱摦廃攇悢偑偙偺傛偆側忬嫷側偺偱丄崌惉屻偱偼丄媽斉YACC偺曽偑寢壥揑偵偼懍偔側傝傑偡丅
Cyclone丄Spartan3偱傕崌惉偟偰傒傑偟偨偑丄係倶MH倸偱偟偨丅乮Stratix3偱傕傗偭偰傒偨偺偱偡偑丄Quartus(6.1)偺僱僢僩儕僗僩偺彂偒崬傒偱InternalError偲側偭偰偟傑偄丄抶墑SIM偱摦嶌妋擣偑偱偒側偐偭偨偺偱妱垽偟傑偡丅乯
Quartus偱抶墑僷僗偺夝愅傪偟偰傒傞偲丄梊憐捠傝偺売強偑僱僢僋偵側偭偰偄傞傛偆偱偡丅傗偼傝CPU扨懱偱偼100MHz埵偼弌偰梸偟偄偺偱丄懳嶔夵慞偵偮偄偰丄屻偱峫偊傞偙偲偵偟傑偟傚偆丅偲傝偁偊偢丄僉儍僢僔儏側偟偺CPU扨懱偱丄婰弎忋偺栤戣摍側偄偐偳偆偐傪挷傋傞偨傔偵丄抶墑僔儈儏儗乕僔儑儞傪峴偄摦嶌妋擣傪峴偄傑偟偨丅僨僶僀僗偼丄忋婰僨僶僀僗丄VeritakVersion偼3.32乮埲忋偱側偄偲摦偒傑偣傫乯偱偡丅
抶墑SIM偲RTL偱丄婎杮揑偵偼丄崌惉懳徾偩偗抲偒姺偊傟偽傛偄偺偱偡偑丄庒姳婥傪偮偗傞偲偙傠偑偁傝傑偡丅
僽儘僢僋傪崌惉僽儘僢僋偵抲偒姺偊偰偺拲堄揰
崱夞偺抶墑SIM偼丄CPU僐傾扨懱偩偗崌惉偟偰偄傑偡丅Wishbone僶僗僐儞僩儘乕儔丄I僉儍僢僔儏丄D僉儍僢僔儏偼擖偭偰偄傑偣傫丅偮傑傝CPU偼丄崌惉婍偑惗惉偟偨儌僕儏乕儖偱丄偦偺懠偼丄RTL儌僨儖傪偦偺傑傑巊偭偰偄傑偡丅偨偩偟丄埲壓偺揰偱彮偟曄峏偟偰偄傑偡丅
僋儘僢僋廃婜
丂崌惉婍偑尵偭偰偒偨抣偱傛偄傛偆側婥偑偟傑偡偑丄嵟戝嬱摦廃攇悢偲丄擖椡嵟戝抶墑偼丄昁偢偟傕堦抳偟傑偣傫丅摨婜宯偲偟偰偺嵟戝嬱摦廃攇悢偲偼暿偵FPGA偺擖椡抶墑偑擖偭偰偒傑偡丅偙偪傜偺僷僗抶墑偺曽偑戝偒偄偲崱傑偱偺RTL儌僨儕儞僌偺埵憡娭學偑偢傟傞偙偲偵側偭偰偟傑偆偺偱丄崱傑偱偺RTL儌僨儖傪偦偺傑傑愙懕偡傞偙偲偑偱偒側偔側偭偰偟傑偄傑偡丅崱夞偼丄扨弮偼婰弎娭學偺僠僃僢僋偑栚揑側偺偱戝偒側僋儘僢僋廃婜傪擖椡偟偰摨偠僥僗僩儀儞僠傪巊梡偟偰偄傑偡丅
Z栤戣
丂RTL偱偼丄Z偱floating 偩偭偨怣崋傪擖椡偟偰傕栤戣側偐偭偨怣崋偱傕丄崌惉儌僕儏乕儖偱偼丄偐側傜偢IO僶僢僼傽偑擖偭偰偔傞偙偲偵拲堄偟傑偡丅偙傟傜偼丄Z怣崋傪庴偗庢傞偲偦偺弌椡偼X偵側偭偰偟傑偄RTL偲偺嫇摦偑堦抳偟側偔側傝傑偡丅廬偭偰丄崌惉儌僕儏乕儖偵偼丄僼儘乕僥傿儞僌怣崋傪擖傟側偄傛偆偵弶婜壔偟偰擖椡偡傞傛偆偵偟傑偡丅偙傟偼丄RTL婰弎偐傜婥傪偮偗偨偄偱偡丅
儗乕僗栤戣
丂懠偺RTL儌僕儏乕儖偼丄Zero抶墑偺摨婜宯偵偨偄偟偰丄崌惉儌僕儏乕儖偼丄CLK,僨乕僞僷僗撈棫偵堦杮堦杮抶墑偑堎側傝傑偡丅偮傑傝CLK偺曽偑憗偔摓拝偡傟偽栤戣側偄偺偱偡偑丄偦偆側傞曐徹偼偳偙偵傕偁傝傑偣傫丅偙偙偱偺栤戣偼CLK偺曽偑抶偔摓拝偟偨応崌偼丄儗乕僗偵側偭偰偟傑偆偙偲偱偡丅偙偺偙偲偼惂屼偺偟傛偆偑側偄偺偱丄僥僗僩儀儞僠懁偱偁傜偐偠傔DataPath偵懳偟偰丄廫暘戝偒側抶墑傪帩偨偣偰儗乕僗偑敪惗偟側偄傛偆偵偟偰傗傝傑偡
埲忋偺3偮偺揰偵拲堄偟偰丄ifdef偱丄RTL偲抶墑SIM傪愗傝懼偊傞傛偆側儀儞僠偲偟傑偟偨丅
Virtex4/Spartan3/Stratix2/Cyclone偱傕摨條偵抶墑SiM傪峴偄丄娙扨側摦嶌妋擣傪峴偭偰偄傑偡丅偲傝偁偊偢丄CPU扨懱偵偮偄偰偼婰弎忋偺栤戣偼側偝偦偆偱偡丅乮崱夞偼丄Xilinx梡丒Altera梡偲婰弎傪ifdef偱暘偗偰偄傑偣傫丅乯
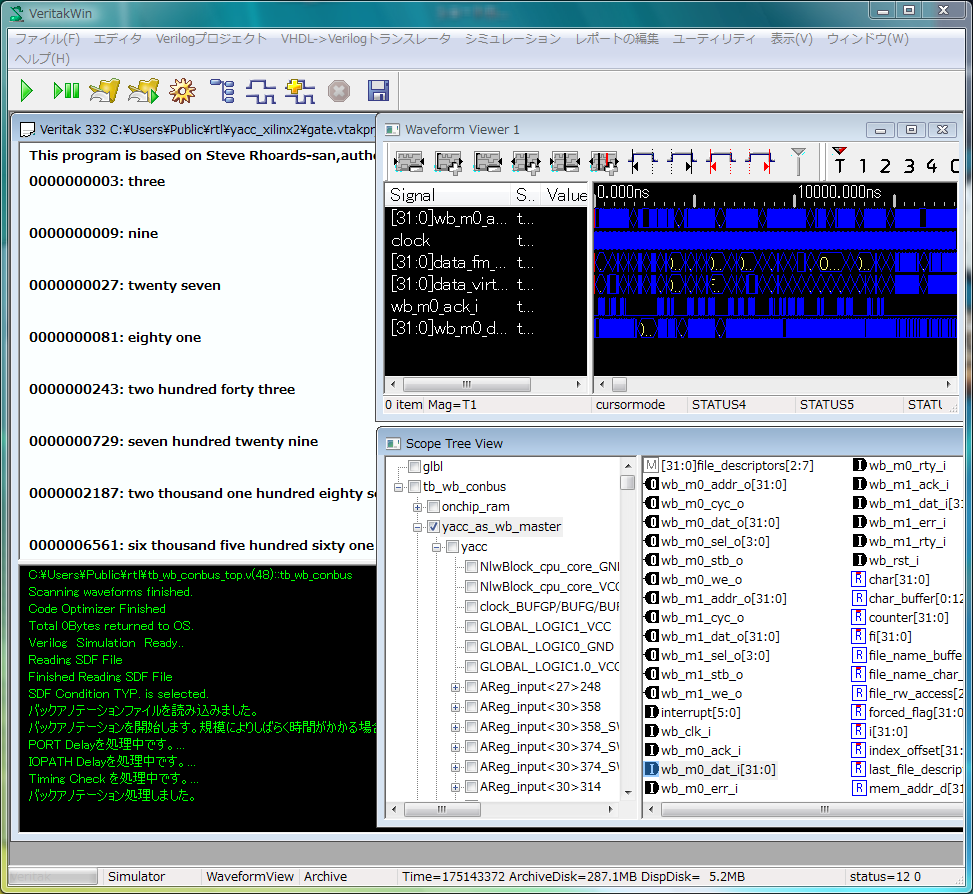
偙偺傛偆偵僽儘僢僋偱崌惉乕抶墑SIM偱儃僩儉傾僢僾偟偰偄偔曽朄偼丄偄偒側傝慡僽儘僢僋傪摦偐偟偰丄摦偐側偄->夝愅傛傝傕岠棪偑傛偄偲巚偄傑偡丅
RTL偺応崌偱偟偨傜丄慡撪晹怣崋傪杦偳懄嵗偵尒傟傑偡偑丄崌惉屻偵側傞偲RTL撪晹怣崋偼尨宆傪偲偳傔偰偄側偄偺偱丄摦偐側偐偭偨偲偒偺夝愅偵旕忢偵庤娫庢傝傑偡丅傑偨丄偙傟偔傜偄偺婯柾偱傕CPU扨懱偱偺崌惉丄PostLayout偱1帪娫埵懸偨偝傟傑偡乮Xilinx偺応崌乯偺偱丄婅傢偔偽妋擣偱廔傢傝丄偙偙偱僨僶僢僌偼偟偨偔側偄傕偺偱偡丅
慡懱偺崌惉
慡懱偺崌惉傪偟偰傒傑偟偨丅僨僶僀僗偼Staratix2偱偡丅慡懱偺崌惉偱偼丄CPU僐傾偺奜懁偵偁偭偨壖憐RAM偲壖憐IO億乕僩傪偼偢偟丄FPGA偺奜懁偵堏摦偝偣傑偡丅偙傟偼丄壖憐揑IO億乕僩偵側傞偺偱僶僗傪墶庢傝偡傞昁梫偼側偔force/release偼奜偟偰偄傑偡丅
壓埵偺僽儘僢僋傪摦偐偡偺偵壖憐僨僶僀僗乮儀儞僠乯傪巊偄丄偦偺僽儘僢僋偺摦嶌傪妋擣偟偨傜丄傑偨偝傜偵忋埵偵壖憐僨僶僀僗傪帩偭偰摦嶌偝偣儃僩儉傾僢僾偟偰偄偒傑偡丅幚嵺偺SDRAM僐儞僩儘乕儔傗丄232C億乕僩偑側偔偰傕丄壖憐揑側僨僶僀僗傪巇棫偰摦嶌偝偣傞偙偲偑偱偒傑偡丅
崱夞偼丄CPU僐傾丄I僉儍僢僔儏丄D僉儍僢僔儏丄Wishbone僶僗僐儞僩儘乕儔傪FPGA忋偺H/W偲偟偰偄傑偡丅僴乕僪揑偵偼枹偩枹姰惉偱偡偑丄僶僗忋偱摦嶌偡傞CPU偺専徹偑摉柺偺栚揑偱偡偺偱偙傟偱傛偄偺偱偡丅
Wishbone偺Slave偼丄擇偮偱壖憐RAM丄壖憐IO億乕僩偱偡丅FPGA偺奜懁偱嬱摦偡傞傕偺偲偟傑偡丅
壓偼丄Stratix俀偵傛傞崌惉寢壥偱偡丅乮D僉儍僢僔儏侾俇KB ,I僉儍僢僔儏侾俇KB)
嬱摦廃攇悢偼丄CPU扨懱傛傝傕偝傜偵壓偑傝54MHz偵側偭偰偟傑偄傑偟偨丅僉儍僢僔儏廃傝偺抶墑偑僾儔僗偝傟偰偄傞偺偩偲巚偄傑偡丅

Altera偱RAM傪悇掕偝偣傞偨傔偺婰弎丂
崱夞偼丄堄幆偟偰Wizard偱RAM傪婰弎偟偰偄傑偣傫丅偱偒傞側傜Xilinx/Altera偲傕摨偠僜乕僗偵偟偨偄偐傜偱偡偑丄摉弶偺婰弎偱偼丄RAM傪infer偟偰偔傟傑偣傫偱偟偨丅(Quartus7.0)丂僞僌RAM偼杮幙揑偵Dual偱偡丅Write偲Read摨偠僞僀儈儞僌偱丄堘偆傾僪儗僗傪張棟偡傞偨傔偵DUAL摦嶌偑昁恵偵側傝傑偡丅
摨偠傾僪儗僗側偺偱忕挿偺傛偆側婥偑偟傑偡偑丄偙偆偟側偄偲FF偲偟偰崌惉偝傟朿戝側儕僜乕僗偑昁梫偵側偭偰偟傑偄傑偡丅懡暘Read偵娭偟偰偼丄柧帵揑側摨婜FF偑崌惉婍偵偲偭偰偼昁梫側偺偱偟傚偆丅偦傟傪柧帵偟偰傗傞偙偲偱丄RAM偑悇掕偝傟傗偡偔側偭偨偺偩偲巚偄傑偡丅Xilinx偱偼偙偺晹暘偼側偔偰傕2億乕僩RAM傪悇掕偟偰偔傟傞傛偆偱偡偑丄2億乕僩RAM偵娭偟偰偼丄傑偨暿偺栤戣偑偁傝傑偡丅乮屻弎乯
//Mar.26.2007 for synthesis
reg [RAM_ADDRESS_MSB:0] addr_way_temp;
reg [RAM_ADDRESS_MSB:0] addr_way_reg,addr_way_reg_latch;//Mar.27.2007
always @(*) begin
addr_way_temp=!pipe_proceed ? addr_way_reg : virtual_address[4 +:RAM_ADDRESS_MSB+1];
end
always @(posedge clock) begin
begin
addr_way_reg<=addr_way_temp;//
addr_way0<= addr_way_temp;//Mar.28.2007 for Quartus丗write 梡偲Read梡傪暘偗傞偙偲偱Dual丂Port RAM傪擣幆偝偣傞
addr_way1<= addr_way_temp;//Mar.28.2007 for Quartus丗write 梡偲Read梡傪暘偗傞偙偲偱Dual丂Port RAM傪擣幆偝偣傞
addr_control<=addr_way_temp;//Mar.28.2007 for Quartus丗write 梡偲Read梡傪暘偗傞偙偲偱Dual丂Port RAM傪擣幆偝偣傞
end
end
抶墑SIM偱偡丅嬱摦廃攇悢(25MHz乯
Xilinx Dual Port RAM 偺栤戣
Alteral偱偼丄Megawizard傪巊傢偢偵抶墑SIM偱偒偨偺偱丄Xilinx偱傕摨偠婰弎偱峴偗傞偩傠偆偲巚偄偨偄偺偼恖忣偲偄偆傕偺偱偡偑丄巆擮側偑傜偦偆娙扨偱偼偁傝傑偣傫丅Xilinx偺Dual丂PortRAM丂偼丄Write億乕僩偲Read億乕僩偑摨偠傾僪儗僗偱偺彂偒崬傒偩偲Read偑晄掕偵側傞(Write
First)偲偄偆巇條偱偡丅偙傟偱偡偲RTL偺怳傞晳偄偲崌惉屻偺怳傞晳偄偑堎側傞偙偲偵側偭偰RTL僔儈儏儗乕僔儑儞偑捠偭偰傕抶墑SIM偑捠傜側偄偲偄偆偙偲偵側偭偰偟傑偄傑偡丅Coregen傪巊偭偰RAM傪惗惉偝偣傟偽丄RTL儗儀儖偱傕寈崘傪敪偟傑偡偑丄Wizard傪巊傢側偄婰弎偱偼丄抶墑SIM傪偟偰丄弶傔偰偍偐偟偄偙偲偵婥偯偒傑偡丅
偙偺栤戣偼丄暘嶶RAM傪巊偊偽夞旔偡傞偙偲偑偱偒傑偡丅帠幚丄32bitx32bit偺儗僕僗僞僼傽僀儖偼丄師偺傛偆偵婰弎偟偰丄暘嶶RAM傪巜掕偟偰偄傑偡丅
乮偪側傒偵丂`ifdef 偱丄// synthesis..丂傪柍帇偝偣偨傝偡傞偙偲偼偱偒側偄傛偆偱偡丅乯
//May.23.2005
//Tak.Sugawara
//Generic RAM module
//
module gen_ram32x32
(
input wire [31:0] data,
input wire wren,//wr
input [4:0] wraddress,
input [4:0] rdaddress_a,rdaddress_b,
input wire clock,
output wire [31:0] qa, qb,
input wire stall,sync_reset);
reg [4:0] address_a_reg,address_b_reg;//address register
// synthesis attribute ram_style of mem is distributed;
reg [31:0] mem [0:31];//actual memory
integer i;
//address_a_reg
always @ (posedge clock) begin
if(sync_reset) address_a_reg<=0;
else if (!stall) address_a_reg<=rdaddress_a;//stall 偺偲偒偼丄慜偺忬懺傪堐帩
end
//adress_b_reg
always @ (posedge clock) begin
if (sync_reset) address_b_reg<=0;
else if (!stall) address_b_reg<=rdaddress_b;//stall 偺偲偒偼丄慜偺忬懺傪堐帩
end
//read operation
assign qa= mem[address_a_reg];
assign qb= mem[address_b_reg];
//stall 張棟
//write operatiion
always @(posedge clock) begin
if (wren && !stall ) //$Z0 偵偼彂偐側偄巇條
mem[wraddress]<=data;
end
initial begin //Note: YACC needs 0 cleared register at power on
for (i=0;i<32;i=i+1) begin
mem[i]=0;//FPGA 弶婜抣侽傪婜懸偟Hard揑側弶婜壔夞楬傪梡堄偟偰偄側偄
end
end
`ifdef RTL_SIM
reg [5*8:1] ra_name="abcd",rb_name="abcd" ,wr_name="abcd";
always @* begin
ra_name=get_reg_name(rdaddress_a);
rb_name=get_reg_name(rdaddress_b);
wr_name=get_reg_name(wraddress);
end
function [4*8:1] get_reg_name;
input [4:0] field;
begin
case (field)
0: get_reg_name="$z0";
1: get_reg_name="$at";
2: get_reg_name="$v0";
3: get_reg_name="$v1";
4: get_reg_name="$a0";
5: get_reg_name="$a1";
6: get_reg_name="$a2";
7: get_reg_name="$a3";
8,9,10,11,12,13,14,15:
$sprintf(get_reg_name,"$t%1d",field-8);
16,17,18,19,20,21,22,23,24,25: $sprintf(get_reg_name,"$s%1d",field-16);
26:get_reg_name="$k0";
27:get_reg_name="$k1";
28:get_reg_name="$gp";
29:get_reg_name="$sp";
30:get_reg_name="$s8";
31:get_reg_name="$ra";
endcase
end
endfunction
`endif
endmodule
偟偐偟丄偙偺庤偑巊偊傞偺偼丄偙偺掱搙偺彫偝偄婯柾傑偱偱丄侾侽Kbit埲忋偁傞僉儍僢僔儏偺僞僌RAM偵偼揔梡偡傞偙偲偑偱偒傑偣傫丅乮帋偟偵僞僌RAM傪暘嶶RAM偱崌惉偟偰傒傞偲丄崌惉偼廔傢傝傑偟偨偑儗僀傾僂僩偑廔傢傜側偄婥攝偱偟偨丅乯
僞僌RAM偼丄巇條忋丄偳偆偟偰傕恀偺Dual摦嶌偱偁傞昁梫偑偁傞偨傔夞楬揑側懳嶔傪偟偰偁傝傑偡丅乮慜夞儔僀僩偱摨偠傾僪儗僗側傜RAM偺弌椡偱偼側偔丄暿偵Save偟偨儗僕僗僞弌椡傪Read偵尒偣傞乯丂偟偐偟丄抶墑SIM偱偼丄default偱偙偺Warning偑僆儞偵側傝僐儞僜乕儖偑Warning偱杽傑偭偰偟傑偄戝帠側儘僌偑尒傟側偔側偭偰偟傑偄傑偡丅
巇曽側偄偺偱丄嵟弶丄Primitive丂Library傪師偺傛偆偵曄峏偟偰柍梡側Warning傪梷惂偟偰偄傑偡丅
(Note:Virtex5丄Spartan3A偺崌惉偱偼丄defparam 偱丄僆乕僶儔僀僪偝傟偰偟傑偆偺偱丄壓婰偺曄峏偼堄枴偑偁傝傑偣傫丅巇曽側偄偺偱丄NET丂LIST乮*timesim.v)
defparam \yacc_as_wb_master/i_cache_module/ram3_way0/Mram_mem .SIM_COLLISION_CHECK
= "NONE";偲偆偄偆晽偵慡抲姺偟傑偟偨丅乯
Veritak丂抶墑SIM偺僾儘僕僃僋僩峔惉偱偡丅
spartan3s1500偱慡懱傪崌惉偟偰傒傑偟偨丅嬱摦壜擻廃攇悢偼30MHz埵偱偡丅

抶墑SIM寢壥偱偡丅嬱摦廃婜(42ns丂spartan3E偼丄48ns)
Virtext5偱傕崌惉偟偰傒傑偟偨丅
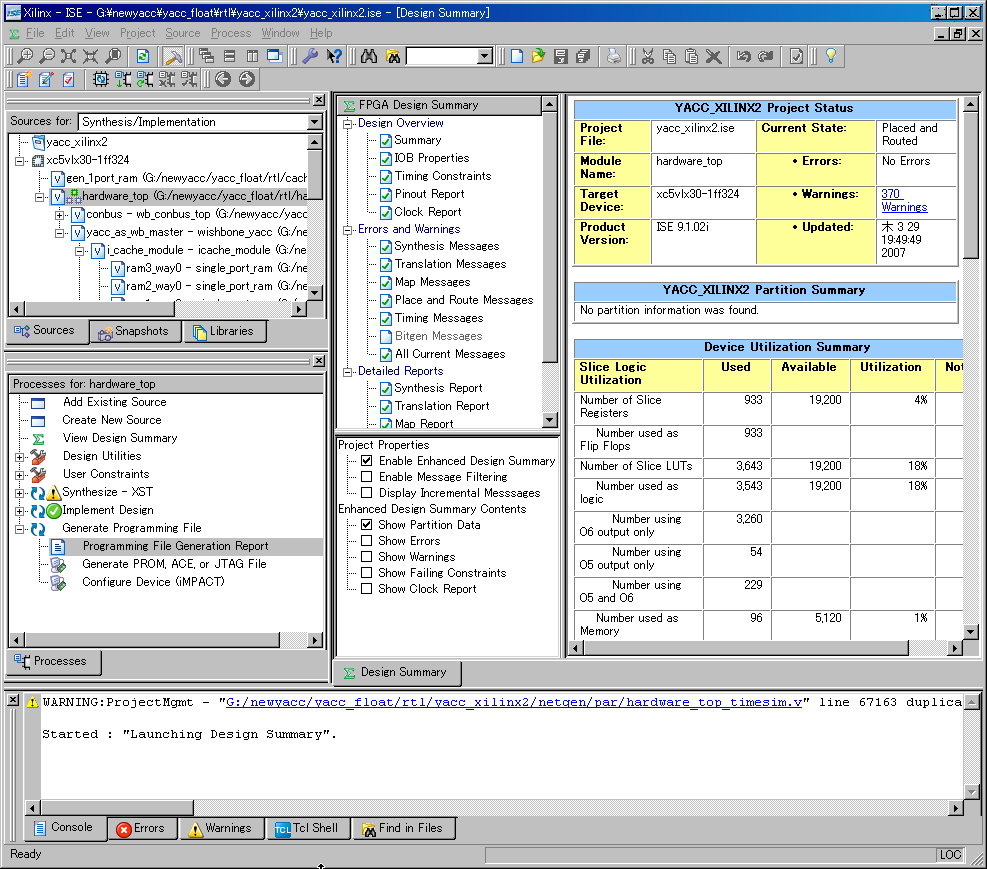
摨條偵丄Virtex5,Spartan3A, Spartan3E, Virtex4,Cyclone3(Quartus 7.0) 偱傕崌惉丒抶墑SIM傪峴偄傑偟偨丅
Wizard傪巊傢側偄偺偱丄梋寁側僠僃僢僋偼擖傜偢RTL丂SIM偼夣懍偱偡偑丄廳梫側寈崘傪尒棊偲偡壜擻惈傕偁傞偺偱丄Wizard傪巊偭偨曽偑傛偄偐傕偟傟傑偣傫丅姷傟偨傜丄崱夞偺曽朄偱傕丂乮Altera/Xilinx傪`ifdef
偱愗傝懼偊傞昁梫傕側偄乯傛偄偐傕偟傟傑偣傫丅
嬱摦壜擻廃攇悢乮億僗僩儗僀傾僂僩丂Clock廃攇悢乯
| Staratix3 | Quartus Error (7.0) |
| Virtex4 | 55MHz |
| Virtex5 | 50MHz |
| Stratix2 | 54MHz |
| Cyclone3 | 38MHz |
| Startan3/3A | 30MHz |
妱傝崬傒娭學偺Refine偱傑偨彮偟曄傢傝傑偡偑戝懱忋婰偺嬱摦廃攇悢偵側傞偲巚偄傑偡丅丂僠儏乕僯儞僌慜偺抣偲偟偰偼丄偙傫側傕偺偱偟傚偆偐丅丂
巇條偺愢柧
侾丏僶僀僩傾僪儗僔儞僌
丂價僢僌僄儞僨傿傾儞偺傒偱偡丅
丂傾僋僙僗偼丄僶僀僩傾僋僙僗丄儚乕僪傾僋僙僗乮2僶僀僩乯丄儘儞僌傾僪儗僗(4僶僀僩乯偑偁傝傑偡丅
Slave丂RAM丂億乕僩傾僋僙僗偼丄慡偰Long偵側傝傑偡丅偙傟偼丄慡偰僉儍僢僔儏傪夘偟偰傾僋僙僗偟偰偄傞偐傜偱偡丅IO椞堟偱偺傾僋僙僗偼丄壓昞偺傛偆偵側傝傑偡丅Read偵偮偄偰偼丄Long/Word/Byte偵學傢傜偢丄慡偰偺ByteEnable偑Enable偝傟傑偡丅乮廬偭偰丄奜晹懁偱偼丄傾僋僙僗扨埵偼暘偐傝傑偣傫丅乯丂Write偵偮偄偰偼丄偦傟偧傟懳墳偡傞僶僀僩偑Enable偝傟傑偡丅
| Access(n:address) | wb_sel_i | |||||||
| Read | [3] | [2] | [1] | [0] | ||||
| Long | 1 | 1 | 1 | 1 | ||||
| Word | 1 | 1 | 1 | 1 | ||||
| Byte | 1 | 1 | 1 | 1 | ||||
| Write | ||||||||
| Long | 1 | 1 | 1 | 1 | ||||
| Word n%4==0 | 1 | 1 | ||||||
| Word else if(n%2==0) | 1 | 1 | ||||||
| Byte n%4==0 | 1 | |||||||
| Byte (n%4==1) | 1 | |||||||
| Byte (n%4==2) | 1 | |||||||
| Byte (n%4==3) | 1 | |||||||
丂
俀丏僉儍僢僔儏
丂僀儞僗僩儔僋僔儑儞丗旕僉儍僢僔儏椞堟巜掕丗偁傝傑偣傫丅僾儘僌儔儉傾僋僙僗偼慡偰僉儍僢僔儏偝傟傑偡丅
丂僨乕僞僉儍僢僔儏丗丂旕僉儍僢僔儏椞堟巜掕丗偁傝傑偡丅巜掕椞堟偼丄僉儍僢僔儏偝傟傑偣傫丅
俁.儕僙僢僩
丂儕僙僢僩椺奜偼偁傝傑偣傫丅僴乕僪儕僙僢僩偱丄儕僙僢僩儀僋僞偐傜僗僞乕僩偟傑偡丅僉儍僢僔儏偺僛儘弶婜壔偑昁梫偵側傝傑偡偑丄偙傟偼丄FPGA偺僴乕僪弶婜壔傪慜採偵偟偰偄傑偡丅
係.僐儞僷僀儖僆僾僔儑儞
丂埲壓偑壜擻偱偡丅
- 儕僙僢僩傾僪儗僗
- Icache/Dcache 僒僀僘丂
- IO椞堟乮Dcache旕摦嶌椞堟乯巜掕
- 妱傝崬傒傾僪儗僗
HDL僼傽僀儖偺define.h丂偱巜掕偟傑偡丅
//Compile Options
`define IO_SPACE 16'h001f //001f_xxxx 64KB space None-Decached Domain
`define Reset_Vector 0 //Reset Vector
`define RESET_ADDRSS `Reset_Vector
`define UTLB_Exception 32'h0000_0080 //Reserved
`define General_Exception 32'h0000_0080 //Interrupt Vector
`define ID_CACHE_SIZE (512) //512->16KBytes for each Icache/Dcache Min.=8,16,32....limitted by Vavlue of IO_SPACE
忋婰IO_SPACE偱丄Data偺旕僉儍僢僔儏椞堟傪巜掕偟傑偡丅杮僾儘僕僃僋僩偱偼丄偲傝偁偊偢丄2MB偺奜晹儊儌儕傪憐掕偟偰丄嵟忋埵64KB傪IO椞堟偲偟偰偟傑偡丅IO_SPACE偑巊傢傟傞偺偼丄D僉儍僢僔儏偺拞偩偗偱丄師偺僐乕僪偱偡丅
wire non_cache_domain1=virtual_address[31:16]==`IO_SPACE;// wire non_cache_domain=non_cache_domain1 && pipe_proceed;//
俆丏妱傝崬傒
丂丂撈帺偺幚憰偱偡丅HDL偱掕媊偝傟傞妱傝崬傒Vector偵暘婒偟傑偡丅
俇丏僇乕僱儖儌乕僪丒儐乕僓儌乕僪
丂丂僇乕僱儖儌乕僪偱摦嶌偟傑偡丅乮摿偵幚憰偟偰偄傑偣傫丅乯
巊梡曽朄偺愢柧
侾丏僨僓僀儞奒憌
丂壓恾偺捠傝偱偡丅DUT埲壓偑僴乕僪僂僃傾崌惉懳徾偱偡丅virtual_io_port偲onnchip_ram偼丄Wishbone僶僗偵愙懕偝傟偨FPGA奜晹偺儀儞僠乮壖憐乯偱偡丅崌惉懳徾偺DUT偼丄傗偼傝Wishbone僶僗偵愙懕偝傟傞偺偱丄FPGA偺IF偺杦偳偼丄壓恾偺捠傝丄Wishbone僶僗偺堊偺慄偵側傝傑偡丅
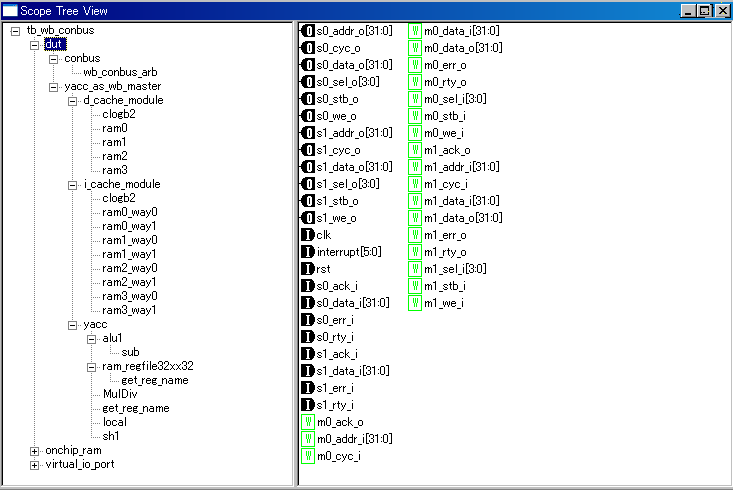
俀丏娐嫬偺僀儞僗僩乕儖
夝搥偡傞偲埲壓偺僼僅儖僟偵側偭偰偄傑偡丅
丂丂
| 傾僀僥儉 | 強嵼 |
| 僥僗僩梡C僜乕僗 | malloc2 |
| C僜乕僗僐儞僷僀儖偺堊偺僶僢僠僼傽僀儖 | malloc2 |
| C僐儞僷僀儔 | mips-elf |
| HDL僜乕僗 | rtl |
| 僣乕儖僜乕僗/VC++7僾儘僕僃僋僩僼傽僀儖 | tool_source_by_tak |
| Veritak僾儘僕僃僋僩僼傽僀儖 | rtl |
俁丏C僐儞僷僀儔傪巊偆
malloc2僼僅儖僟偱丄compilexx.bat 偑C僐儞僷僀儖偡傞僶僢僠僼傽僀儖偱偡丅椺偊偽compile.bat偼丄師偺傛偆偵側偭偰偄傑偡丅
庤弴偲偟偰偼丄僗僞乕僩傾僢僾僼傽僀儖plasmaboot.asm 傪屇傫偱丄摉奩們僜乕僗傪mipc-elf-gcc偱僐儞僷僀儖偟傑偡丅C僐儞僷僀儖偼丄偡傋偰丄-msoft-float傪偮偗偰偔偩偝偄丅丂偦偺屻丄儕儞僇mips-elf-ld偱丄僆僽僕僃僋僩僼傽僀儖傪儕儞僋偟偰test.exe偲偄偆幚峴宍幃偺僼傽僀儖傪惗惉偟傑偡丅test.exe傪媡傾僙儞僽儖偟偨僼傽僀儖偑list1.txt偲偟偰惗惉偝傟傑偡丅傑偨丄儅僢僾忣曬偑丄test.map偲偟偰弌椡偝傟傑偡丅test.map忣曬傪擖椡偲偡傞僣乕儖convert_mips3.exe偱丄僗僞僢僋億僀儞僞乮偙偙偱偼丄1efff0丂16僶僀僩傾儔僀儞偲偟偰偔偩偝偄丅)偺嵶岺傪偟偰丄撉傒崬傓僼傽僀儖偑弌棃忋偑傝傑偡丅弌椡偼丄奺庬宍幃偱弌椡偟偰偄傑偡偑丄HDL僔儈儏儗乕僔儑儞偱偼丄Veritak偺$hex2veri偱丄hex僼傽僀儖傪Verilog宍幃偵偟偰偄傑偡丅yams.exe
偼丄cpu僔儈儏儗乕僞偱丄儕僼傽儗儞僗偲偟偰偺僔儈儏儗乕僔儑儞傪峴偄傑偡丅寢壥偼丄disasm.txt偲偟偰弌椡偝傟傑偡丅乮2-3暘偱悢昐MB惗惉偟傑偡偺偱丄婥傪偮偗偰偔偩偝偄丅乯
path; path=..\..\..\mips-elf\mips-elf-yacc\bin mips-elf-as -o boot.o plasmaboot.asm mips-elf-gcc -msoft-float -O2 -O -DRTL_SIM -Dmain=main2 -Wall -c count_tak.c mips-elf-ld.exe -Ttext 0 -eentry -Map test.map -s -N -o test.exe boot.o count_tak.o mips-elf-objdump.exe --disassemble test.exe > list.txt rem =must be 16byte alignment convert_mips3.exe 1efff0 copy *.hex ..\..\..\rtl\altera\*.* copy *.hex ..\..\..\rtl\generic\*.* copy *.coe ..\..\..\rtl\xilinx\*.* copy *.mif ..\..\..\rtl\xilinx\*.* copy *.hex ..\..\..\rtl\*.* yams.exe test.exe test.map 200000 1efff0
僗僞乕僩傾僢僾僼傽僀儖偺拞恎
C儊僀儞偵旘傇傑偱偺廫悢峴偼丄convert_mips3.exe偑愝掕偟傑偡偺偱丄曄峏偟側偄偱偔偩偝偄丅$gp偲$sp偼丄convert_mips3.exe偑帺摦愝掕偟傑偡丅
##################################################################
# TITLE: Boot Up Code
# AUTHOR: Steve Rhoads (rhoadss@yahoo.com)
# DATE CREATED: 1/12/02
# FILENAME: boot.asm
# PROJECT: Plasma CPU core
# COPYRIGHT: Software placed into the public domain by the author.
# Software 'as is' without warranty. Author liable for nothing.
# DESCRIPTION:
# Initializes the stack pointer and jumps to main2().
##################################################################
.text
.align 2
.globl entry
.ent entry
entry:
.set noreorder
#These eight instructions must be the first instructions.
#convert_mips3.exe will correctly initialize $gp
lui $gp,0
ori $gp,$gp,0
#convert.exe will set $4=.sbss_start $5=.bss_end
lui $4,0
ori $4,$4,0
lui $5,0
ori $5,$5,0
lui $sp,0
ori $sp,$sp,0xfff0 #initialize stack pointer
$BSS_CLEAR:
sw $0,0($4)
slt $3,$4,$5
bnez $3,$BSS_CLEAR
addiu $4,$4,4
sw $5,bss_end_save
# lui $4,0
# ori $4,0xff01 #尰忬懺丂僇乕僱儖儌乕僪丄妱傝崬傒Enable/妱傝崬傒Enable價僢僩SET
# mtc0 $4,$12 #妱傝崬傒Enable ,CPU僔儈儏儗乕僞偑妱傝崬傒傪僒億乕僩偟偰偄側偄偺偱僇僢僩
jal main2 # C 儊僀儞偵旘傇
nop
$L1:
j $L1
.align 4
.globl bss_end_save
bss_end_save:
.long 0
.org 0x80
#.set noreorder
#address 0x3c
interrupt_service_routine:#僀儞僞儔僾僩僴儞僪儔
addi $sp, $sp, -25*4
sw $1, 1*4($sp)
sw $2, 2*4($sp)
sw $3, 3*4($sp)
sw $4, 4*4($sp)
sw $5, 5*4($sp)
sw $6, 6*4($sp)
sw $7, 7*4($sp)
sw $8, 8*4($sp)
sw $9, 9*4($sp)
sw $10, 10*4($sp)
sw $11, 11*4($sp)
sw $12, 12*4($sp)
sw $13, 13*4($sp)
sw $14, 14*4($sp)
sw $15, 15*4($sp)
sw $24, 16*4($sp)
sw $25, 17*4($sp)
sw $28, 18*4($sp)
sw $30, 19*4($sp)
sw $31, 20*4($sp)
#偙偙偱丂C丂妱傝崬傒儐乕僓儖乕僠儞傪屇傇
lw $1, 1*4($sp)
lw $2, 2*4($sp)
lw $3, 3*4($sp)
lw $4, 4*4($sp)
lw $5, 5*4($sp)
lw $6, 6*4($sp)
lw $7, 7*4($sp)
丂丂丂lw $8, 8*4($sp)
lw $9, 9*4($sp)
lw $10, 10*4($sp)
lw $11, 11*4($sp)
lw $12, 12*4($sp)
lw $13, 13*4($sp)
lw $14, 14*4($sp)
lw $15, 15*4($sp)
lw $24, 16*4($sp)
lw $25, 17*4($sp)
lw $28, 18*4($sp)
lw $30, 19*4($sp)
lw $31, 20*4($sp)
addi $sp, $sp, 25*4
丂丂丂mfc0 $27,$14 # EPC=14 栠傝斣抧偑婰榐偟偰偁傞EPC傪$27偵撉傓
jr $27 # 妱傝崬傒暅婣
rfe # 妱傝崬傒Enable丄儐乕僓儌乕僪暅婣
nop
.set reorder
.end entry
柦椷僷僀僾儔僀儞偺條巕偱偡丅僗僩乕儖偑側偄偲偒丄柦椷偼丄1柦椷/侾CLK偱張棟偝傟偰偄傞偙偲偑暘偐傝傑偡丅
Dcache偺條巕偱偡丅僪儔僀僗僩乕儞儀儞僠偱丄
`define ID_CACHE_SIZE (8*16) //512->16KBytes for each Icache/Dcache Min.=8,16,32....limitted by Vavlue of IO_SPACE 偲堄恾揑偵僉儍僢僔儏梕検傪彮側偔偟偰僉儍僾僠儍偟偰偄傑偡丅default愝掕偺512(=16KB Dcache)偱偼丄慡晹僉儍僢僔儏偵廂傑偭偰丄儔僀僩僶僢僋僔乕働儞僗傪尒傞偙偲偼偱偒傑偣傫丅 僔乕働儞僗偼丄Dcache偵僸僢僩偟側偐偭偨偲偒偵stall_to_cpu傪傾僒乕僩偟偰CPU偵懸偪傪巜帵偟傑偡丅偦偺娫丄儔僀僩僶僢僋偱儊僀儞儊儌儕傊偺彂偒栠偟丄梫媮儔僀儞傪儕僼傿儖偟傑偡丅 ext_write偼丄Wishbone僶僗傊偺儔僀僩僗僩儘乕僽丄ack_fm_ext偑Wishbone僶僗偐傜偺Ack偱偡丅
係丏妱傝崬傒儖乕僠儞傪C偱婰弎偡傞
係丏侾丂僗僞乕僩傾僢僾僼傽僀儖
丂愱梡偺僗僞乕僩傾僢僾僼傽僀儖(埲壓乯傪巊偭偰偔偩偝偄丅忋偲傎傏摨偠偱偡偑丄僀儞僞儔僾僩傪Enable偟偰丄妱傝崬傒儖乕僠儞偱偼丄僐儞僥僉僗僩偺Save/Restore偲C儖乕僠儞偺屇傃弌偟傪峴偄傑偡丅僐儞僥僉僗僩偼丄慡32儗僕僗僞傪Save偡傞昁梫偼側偔埲壓偱廫暘偱偡丅懡廳妱傝崬傒偵偼乮僼傽乕儉偑乯懳墳偟偰偄傑偣傫丅
##################################################################
# TITLE: Boot Up Code
# AUTHOR: Steve Rhoads (rhoadss@yahoo.com)
# DATE CREATED: 1/12/02
# FILENAME: boot.asm
# PROJECT: Plasma CPU core
# COPYRIGHT: Software placed into the public domain by the author.
# Software 'as is' without warranty. Author liable for nothing.
# DESCRIPTION:
# Initializes the stack pointer and jumps to main2().
##################################################################
.text
.align 2
.globl entry
.ent entry
entry:
.set noreorder
#These eight instructions must be the first instructions.
#convert.exe will correctly initialize $gp
lui $gp,0
ori $gp,$gp,0
#convert.exe will set $4=.sbss_start $5=.bss_end
lui $4,0
ori $4,$4,0
lui $5,0
ori $5,$5,0
lui $sp,0
ori $sp,$sp,0xfff0 #initialize stack pointer
$BSS_CLEAR:
sw $0,0($4)
slt $3,$4,$5
bnez $3,$BSS_CLEAR
addiu $4,$4,4
sw $5,bss_end_save
lui $4,0
ori $4,0xff01 #尰忬懺丂僇乕僱儖儌乕僪丄妱傝崬傒Enable/妱傝崬傒Enable價僢僩SET
mtc0 $4,$12 #妱傝崬傒Enable
jal main2 # C 儊僀儞偵旘傇
nop
$L1:
j $L1
.align 4
.globl bss_end_save
bss_end_save:
.long 0
.org 0x80
#.set noreorder
#address 0x3c
interrupt_service_routine:#僀儞僞儔僾僩僴儞僪儔
addi $sp, $sp, -25*4
sw $1, 1*4($sp)
sw $2, 2*4($sp)
sw $3, 3*4($sp)
sw $4, 4*4($sp)
sw $5, 5*4($sp)
sw $6, 6*4($sp)
sw $7, 7*4($sp)
sw $8, 8*4($sp)
sw $9, 9*4($sp)
sw $10, 10*4($sp)
sw $11, 11*4($sp)
sw $12, 12*4($sp)
sw $13, 13*4($sp)
sw $14, 14*4($sp)
sw $15, 15*4($sp)
sw $24, 16*4($sp)
sw $25, 17*4($sp)
sw $28, 18*4($sp)
sw $30, 19*4($sp)
sw $31, 20*4($sp)
#偙偙偱丂C丂妱傝崬傒儖乕僠儞傪屇傇
jal interrupt # C 儊僀儞偵旘傇
lw $1, 1*4($sp)
lw $2, 2*4($sp)
lw $3, 3*4($sp)
lw $4, 4*4($sp)
lw $5, 5*4($sp)
lw $6, 6*4($sp)
lw $7, 7*4($sp)
lw $8, 8*4($sp)
lw $9, 9*4($sp)
lw $10, 10*4($sp)
lw $11, 11*4($sp)
lw $12, 12*4($sp)
lw $13, 13*4($sp)
lw $14, 14*4($sp)
lw $15, 15*4($sp)
lw $24, 16*4($sp)
lw $25, 17*4($sp)
lw $28, 18*4($sp)
lw $30, 19*4($sp)
lw $31, 20*4($sp)
addi $sp, $sp, 25*4
mfc0 $27,$14 # EPC=14 栠傝斣抧偑婰榐偟偰偁傞EPC傪$27偵撉傓
jr $27 # 妱傝崬傒暅婣
rfe # 妱傝崬傒Enable丄儐乕僓儌乕僪暅婣
nop
.set reorder
.end entry
妱傝崬傒婰弎丄僒儞僾儖C僜乕僗偱偡丅
#include "yacc_port.h"
#include "printy.h"
#include "malloc.h"
void main()
{
unsigned long i;
for (i=0;i<1000;i++){
unsigned c='*';
printf("%c",c);
}
print("$finish");
}
unsigned counter=0;
void interrupt()
{
printf("\nInterrupt Handler :counter=%d\n",counter++);
}
compile_interrupt.bat偱僐儞僷僀儖屻丄僔儈儏儗乕僔儑儞偡傞偲埲壓偺傛偆偵側傝傑偡丅
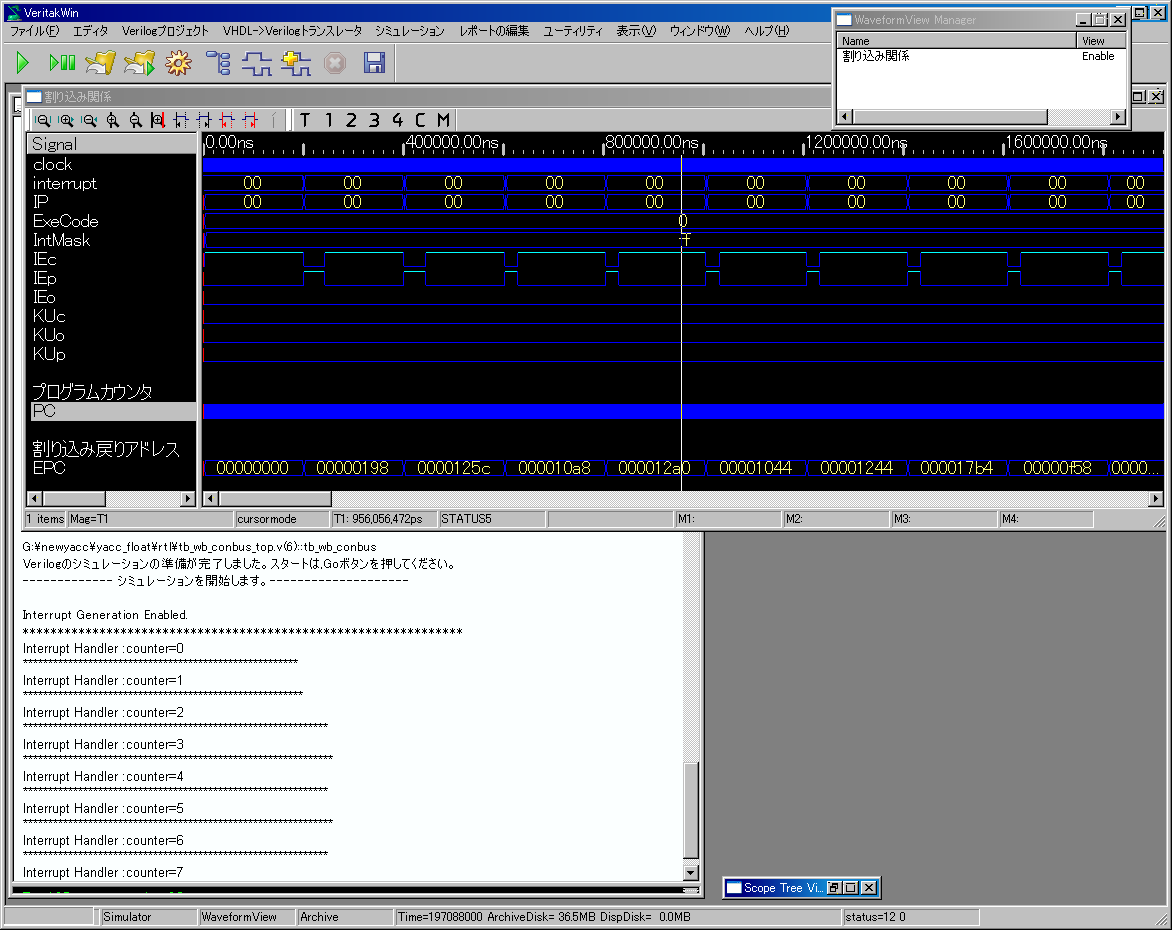
係丏俀僐僾儘僙僢僒娭學偺巇條
妱傝崬傒娭學偼丄僐僾儘僙僢僒偺巇帠偱撈帺偺幚憰偱偡丅尵梩偱愢柧偡傞傛傝傕丄HDL僐乕僪傪尒偨傎偆偑憗偄偱偡丅
側偍丄妱傝崬傒偼丄儗儀儖僙儞僗偱active H偱偡丅妱傝崬傒傪擣幆偡傞偲怴偨側妱傝崬傒偼丄師偺婰弎偱儅僗僋偝傟傑偡丅
丂丂//妱傝崬傒専弌 wire [7:0] ints={ IP,Sw} & IntMask & {8{IEc}};
IEc價僢僩偼丄妱傝崬傒専弌偲暅婣柦椷偱曄壔偟傑偡丅
側偍丄妱傝崬傒僴儞僪儔傪敳偗傞傑偊偵丄妱傝崬傒抂巕傪L偵栠偟偰偔偩偝偄丅偦偆偟側偄偲1柦椷偩偗幚峴屻丄嵞搙妱傝崬傒偑偐偐傞巇條偱偡丅
//僐僾儘僙僢僒------------------------------------------------------------------------------------
// 儗僕僗僞
reg [31:0] EPC;//妱傝崬傒戅旔傾僪儗僗
reg KUo,IEo,KUp,IEp,KUc,IEc;
reg [7:0] IntMask;
reg BD;//椺奜張棟帪偵僨傿儗僀僗儘僢僩
reg [5:0] IP;//奜晹僀儞僞儔僾僩丂張棟拞
reg [1:0] Sw;//僜僼僩僀儞僞儔僾僩丂張棟拞
reg [3:0] ExeCode;//椺奜梫場
//僐僾儘僙僢僒撪晹怣崋
//妱傝崬傒
reg [7:0] int_old;//妱傝崬傒専弌儅僔儞
wire int_rise;
wire int_recog;
wire [4:0] copro_read_address=IR_LR[15:11];//MFC0 rd
wire [4:0] copro_write_address=IR_A[15:11];//MTC0 rd
wire [31:0] status_reg={16'h0,IntMask,2'b00, KUo,IEo,KUp,IEp,KUc,IEc};
wire [31:0] cause_reg={BD,15'h0,IP,Sw,2'b00,ExeCode,2'b00};
wire [31:0] copro_output=copro_read_address==Status_Address ? status_reg :
copro_read_address==Cause_Address ? cause_reg :EPC;
wire cop_write=!dstall && IR_A[31:26]==COP0 && IR_A[25:21]==MT;
//妱傝崬傒専弌
wire [7:0] ints={ IP,Sw} & IntMask & {8{IEc}};
always @(posedge clock) begin
if (sync_reset) int_old<=8'h0;
else if (rfe_command) int_old<=8'h0;//Apr.22.2007 妱傝崬傒RET偱夝彍
else if (int_recog) int_old<=ints; //妱傝崬傒傪擣幆偟偨傜庢傝崬傒
end
assign int_rise=( ints & int_old ) ==0 &&
ints !=0;//妱傝崬傒棫偪忋偑傝専弌丄怴偨側妱傝崬傒偑擣幆偝傟傞傑偱H偵側傞
assign int_recog=int_rise && !dstall && !delayed_slot_processing;//妱傝崬傒擣幆
assign exception_command=!dstall &&
(ir_out[31:26]==SPECIAL && ( ir_out[5:0]==SYSCALL || ir_out[5:0]==BREAK));//TODO SYSCALL/BREAK/exception
always @(posedge clock) begin
if (sync_reset) IP<=0;
else IP<=interrupt;//IP偼ReadOnly
end
wire delayed_slot_processing=IR[31:26]==BCOND ||
IR[31:26]==J ||
IR[31:26]==JAL ||
IR[31:26]==BEQ ||
IR[31:26]==BNE ||
IR[31:26]==BLEZ ||
IR[31:26]==BGTZ ||
(IR [31:26]==SPECIAL && ( IR[5:0]==JR || IR[5:0]==JALR)) ;
always @(posedge clock) begin
if (sync_reset) EPC<=0;
else if (int_recog || exception_command) begin
// if (delayed_slot_processing) EPC<=PC-4;//Apr.22.2007PC-4;//DelaySlot拞側傜暘婒柦椷傪巜偡
// else
EPC<=PC;//Apr.22.2007丂暘婒柦椷偼丄妱傝崬傒嬛巭偵偟偨
end
else if (copro_write_address==EPC_Address && cop_write) EPC<=rf_input;
end
wire rfe_command=!dstall && (IR_LR[31:26]==COP0 && IR_LR[25] && IR_LR[4:0]==RFE);// (ir_out[31:26]==COP0 && ir_out[25] && ir_out[4:0]==RFE);
//Apr.23.2007妱傝崬傒尦偑僋儕傾偝傟偰偄側偔偰傕1柦椷偼幚峴偡傞傛偆偵挷惍偟偨丅
//僗僥乕僞僗儗僕僗僞
always @(posedge clock) begin
if (sync_reset)begin//Apr.22.2007
{KUo,IEo,KUp,IEp,KUc,IEc}<=0;
IntMask<=0;
end else if (copro_write_address==Status_Address && cop_write) begin//儗僕僗僞彂偒崬傒Apr.22.2007
IntMask<=rf_input[15:8];
{KUo,IEo,KUp,IEp,KUc,IEc}<=rf_input[5:0];
end else if (int_recog || exception_command) begin
{KUo,IEo,KUp,IEp,KUc,IEc}<={KUp,IEp,KUc,IEc,2'b00};//椺奜張棟
end
else if (rfe_command) begin
{KUo,IEo,KUp,IEp,KUc,IEc}<={KUo,IEo,KUo,IEo,KUp,IEp};//椺奜張棟暅尦
end
end
//尨場儗僕僗僞
localparam [3:0] CAUSE_INT=0,
CAUSE_SYS=8,
CAUSE_BREAK_POINT=9;
always @(posedge clock) begin
if (sync_reset) ExeCode<=0;
else if (int_recog) ExeCode<=CAUSE_INT;
else if (ir_out[31:26]==SPECIAL && ( ir_out[5:0]==SYSCALL)) ExeCode<=CAUSE_SYS;
else if (ir_out[31:26]==SPECIAL && ( ir_out[5:0]==SYSCALL)) ExeCode<=CAUSE_BREAK_POINT;
end
always @(posedge clock) begin
if (sync_reset) Sw<=0;
else if (copro_write_address==Cause_Address && cop_write) begin
Sw<=rf_input[9:8];//尨場儗僕僗僞偼丄Sw偺傒彂偒崬傒偑偱偒傞
end
end
//BD價僢僩
always @(posedge clock) begin
if (sync_reset) BD<=0;
else if (int_recog || exception_command) begin
if (delayed_slot_processing) BD<=1;
else BD<=0;
end
end
俆丏僔儈儏儗乕僔儑儞
丂僨僶僢僌傗丄撪晹怣崋偺娤應梡偺僾儘僕僃僋僩偲丄崅懍儌乕僪偱偺僔儈儏儗乕僔儑儞偺擇偮偺RTL僔儈儏儗乕僔儑儞偺僾儘僕僃僋僩傪梡堄偟偰偄傑偡丅庤弴偼丄
- malloc2僼僅儖僟偵偁傞compile_**.bat偱C僐儞僷僀儖
- Veritak僾儘僕僃僋僩傪婲摦
偱偡丅僎乕僩僔儈儏儗乕僔儑儞偵偮偄偰偼丄揧晅偟偰偄傑偣傫偑丄忋偺婰弎傪嶲峫偵偡傟偽丄峔惉偱偒傞偲巚偄傑偡丅
俇丏奼挘惈
丂丂Wishbone僶僗偵暋悢偺儅僗僞丄僗儗乕僽傪捛壛偱偒傑偡丅偮偓偺愝寁偲偟偰偼丄僔儕傾儖億乕僩偺幚憰偑偁傝傑偡偑丄Wishbone僗儗乕僽偲偟偰梕堈偵幚憰偱偒傞偱偟傚偆丅
奐敪娐嫬堦幃僟僂儞儘乕僪4/26/2007斉丂60MB
僼僅儖僟倰倲倢偺壓偵攝抲偟偰偔偩偝偄丅
Xilinx乮Spartan3)/Altera乮Cyclone3)僾儘僕僃僋僩14MB 5/9/2007斉
巇條偺愢柧梡Veritak僾儘僕僃僋僩僼傽僀儖丂rtl僼僅儖僟偵抲偄偰3.35埲忋偱撉傫偱偔偩偝偄丅乮3.35枹枮偱奐偔偲攇宍拞偺僐儊儞僩偑徚偊偰偟傑偄傑偡丅乯丂
杮儕儕乕僗偼丄抶墑僔儈儏儗乕僔儑儞偱摦偐偟偰偼偄傑偡偑丄幚婡偱偼堦愗摦偐偟偰偄傑偣傫丅幚婡偱摦偐偡偨傔偵偼丄壖憐偱摦偐偟偰偄傞奜晹ROM/RAM儌僨儖傗奜晹GPIO偺幚憰偑昁梫偵側傝傑偡丅傑偨丄Veritak偱偺Unique婡擻乮$hex2ver,$fputc摍乯傪巊梡偟偰偄傞偨傔偵ModelSim摍偱偼乮偦偺傑傑偱偼乯摦偒傑偣傫丅
7.CPU扨懱僀儞僞乕僼僃乕僗
7.1丂愝寁偺峫偊曽
丂丂僆儕僕僫儖傪拤幚偵嵞尰偡傞偙偲傪栚揑偵偼偟偰偄傑偣傫丅C僐儞僷僀儔傪庁梡偟偰僔僗僥儉傪峔抸偟偰備偔偙偲偑偱偒傟偽傛偟丄偲峫偊偰偄傑偡丅偱偡偺偱丄昁梫偵墳偠偰丄OS偵嬤偄偲偙傠偼丄僼傽乕儉偱懳墳偡傞昁梫偑偁傝傑偡丅傑偨丄IO傗丄妱傝崬傒偼丄撈帺偺巇條偱偡丅
7.2丂僆儕僕僫儖偲偺堘偄
7.2.1僒億乕僩偟偰偄側偄柦椷
- lwr,lwr,swr,swl
丂 幚憰偟偰偄傑偣傫丅彨棃偵搉偭偰幚憰偡傞梊掕偼偁傝傑偣傫丅
丂丂 偙傟傜偼丄忋婰僷僢働乕僕偵娷傑傟傞僐儞僷僀儔傪巊偊偽惗惉偟傑偣傫丅偨偩偟libc偺memcpy偼丄惗惉偟偰偟傑偆偺偱丄僷僢働乕僕拞丄嶌惉偟偨meemcpy傪儕儞僋偡傞傛偆偵偟偰偔偩偝偄丅
- 僶僗僄儔乕丄僆乕僶僼儘乕椺奜丄梊栺柦椷椺奜
丂丂丂幚憰偟偰偄傑偣傫丅彨棃偺Version偱偼丄僒億乕僩偡傞梊掕偱偡偑丄偲傝偁偊偢側偔偰傕巟忈偑側偄偱偟傚偆丅丂丂
7.2.2丂幚憰偑僆儕僕僫儖偲偼堘偆柦椷
- break;syscall
丂丂丂丂偙傟傜偼丄捠忢C偺C僐乕僪偱偼惗惉偟側偄偲巚偄傑偡丅GDB偱巊偆偐傕偟傟傑偣傫偑丄枹挷嵏偱偡丅
- rfe
丂丂丂丂埲壓偺僐乕僪偱妱傝崬傒傪夝彍偟偰偄傑偡丅
//妱傝崬傒専弌
wire [7:0] ints={ IP,Sw} & IntMask & {8{IEc}};
always @(posedge clock) begin
if (sync_reset) int_old<=8'h0;
else if (rfe_command) int_old<=8'h0;//Apr.22.2007 妱傝崬傒RET偱夝彍
else if (int_recog) int_old<=ints; //妱傝崬傒傪擣幆偟偨傜庢傝崬傒
end
assign int_rise=( ints & int_old ) ==0 &&
ints !=0;//妱傝崬傒棫偪忋偑傝専弌丄怴偨側妱傝崬傒偑擣幆偝傟傞傑偱H偵側傞
assign int_recog=int_rise && !dstall && !delayed_slot_processing;//妱傝崬傒擣幆
assign exception_command=!dstall &&
(ir_out[31:26]==SPECIAL && ( ir_out[5:0]==SYSCALL || ir_out[5:0]==BREAK));//TODO SYSCALL/BREAK/exception
always @(posedge clock) begin
if (sync_reset) IP<=0;
else IP<=interrupt;//IP偼ReadOnly
end
wire delayed_slot_processing=IR[31:26]==BCOND ||
IR[31:26]==J ||
IR[31:26]==JAL ||
IR[31:26]==BEQ ||
IR[31:26]==BNE ||
IR[31:26]==BLEZ ||
IR[31:26]==BGTZ ||
(IR [31:26]==SPECIAL && ( IR[5:0]==JR || IR[5:0]==JALR)) ;
always @(posedge clock) begin
if (sync_reset) EPC<=0;
else if (int_recog || exception_command) begin
// if (delayed_slot_processing) EPC<=PC-4;//Apr.22.2007PC-4;//DelaySlot拞側傜暘婒柦椷傪巜偡
// else
EPC<=PC;//Apr.22.2007丂暘婒柦椷偼丄妱傝崬傒嬛巭偵偟偨
end
else if (copro_write_address==EPC_Address && cop_write) EPC<=rf_input;
end
wire rfe_command=!dstall && (IR_LR[31:26]==COP0 && IR_LR[25] && IR_LR[4:0]==RFE);// (ir_out[31:26]==COP0 && ir_out[25] && ir_out[4:0]==RFE);
//Apr.23.2007妱傝崬傒尦偑僋儕傾偝傟偰偄側偔偰傕1柦椷偼幚峴偡傞傛偆偵挷惍偟偨丅
- 忔彍嶼
丂丂丂忔彍嶼偼撪晹偱僗僩乕儖偡傞巇條偱偡丅廬偭偰丄妱傝崬傒拞偵忔彍儗僕僗僞傪Save偡傞昁梫偼偁傝傑偣傫丅
7.2.3丂MMU娭學
丂丂丂MMU偼枹幚憰側偺偱丄娭學偡傞僐僾儘僙僢僒柦椷偼旛偊偰偄傑偣傫丅
7.2.4僐僾儘僙僢僒柦椷
丂丂儗僕僗僞斣崋侾2偺妱傝崬傒娭學偩偗幚憰偟偰偄傑偡丅忋偺僐乕僪傪嶲徠偔偩偝偄丅
7.3 CPU僐傾僀儞僞乕僼僃乕僗
7.3.1丂峔憿
丂埲壓偺僣儕乕偱yacc偑CPU僐傾扨懱偱偡丅塃儁僀儞偺I/O丂偑CPU僐傾扨懱偺怣崋僀儞僞乕僼僃乕僗偵側傝傑偡丅
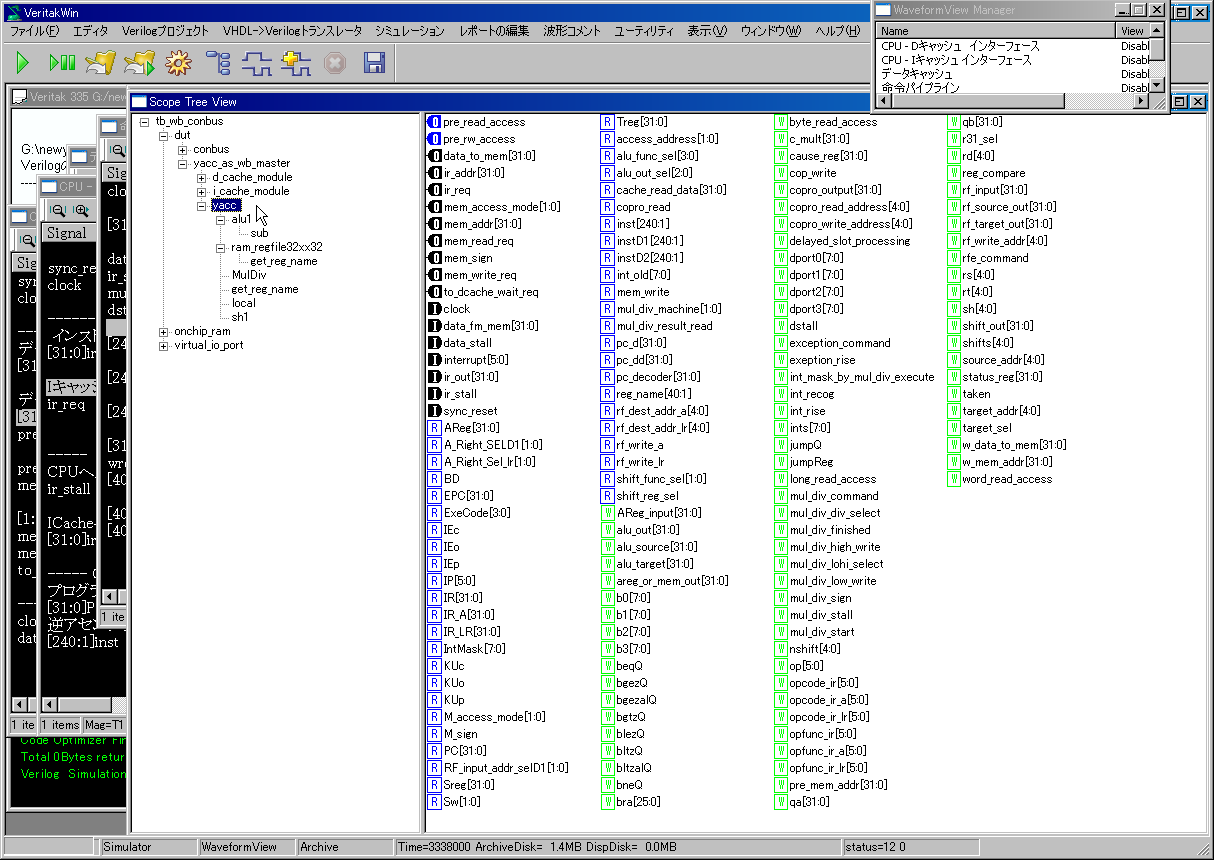
塃僋儕僢僋偱丄僜乕僗峴偵旘傇偲
埲壓偺CPU僐傾扨懱乮僉儍僢僔儏娷傑偢乯偺僀儞僞乕僼僃乕僗怣崋偑尒偊傑偡丅
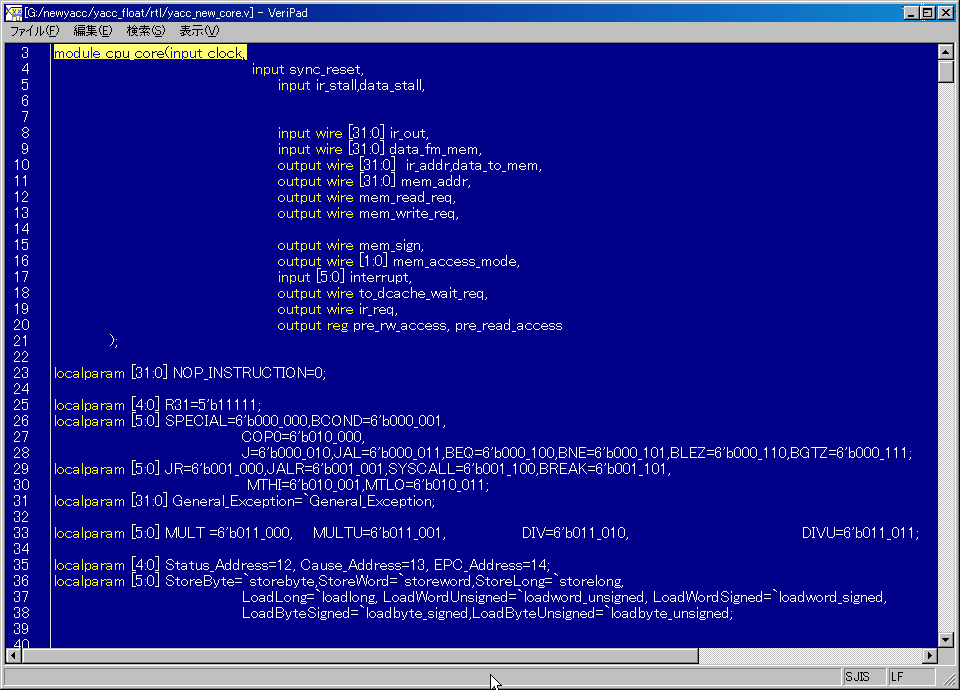
埲壓丄怣崋偺愢柧偱偡偑丄僷僀僾儔僀儞偺怣崋傪偦偺傑傑弌椡偟偰偄傞娭學偱丄暘偐傝偵偔偄偲巚偄傑偡丅埲壓偺僽儘僢僋恾傪尒側偑傜愢柧偟傑偡丅
I僉儍僢僔儏僀儞僞乕僼僃乕僗

I僉儍僢僔儏-CPU 僗僩乕儖
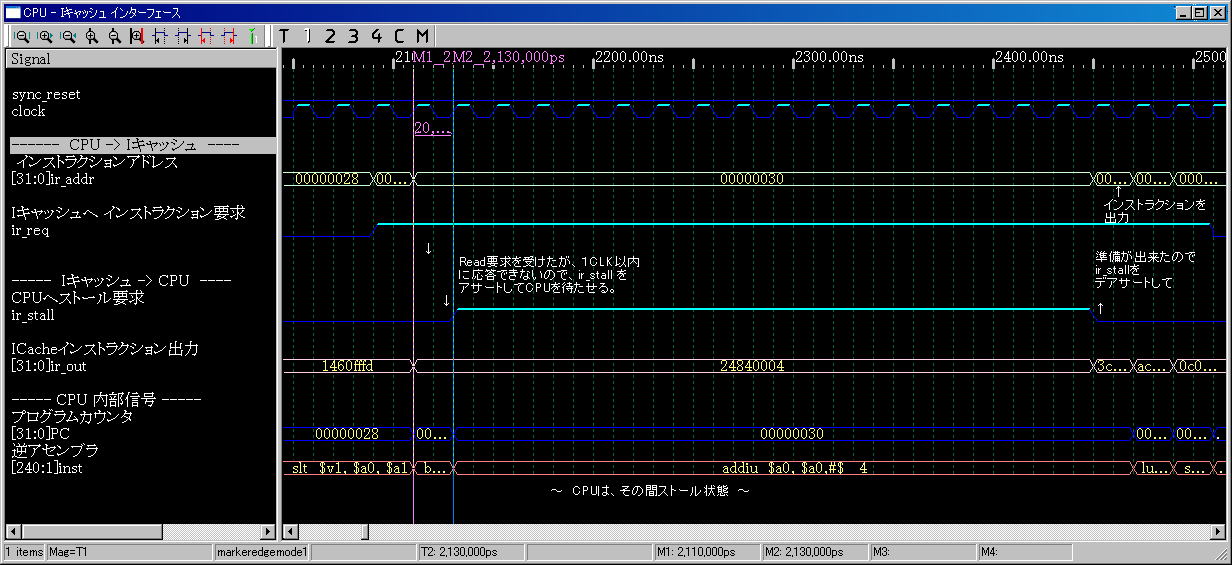
僨乕僞僉儍僢僔儏Write傾僋僙僗
儔僀僩僗僩儘乕僽偼丄忋婰僽儘僢僋恾偱丄IR_LR偺FF偐傜嶌偭偰偄傑偡丅
僨乕僞僉儍僢僔儏Read傾僋僙僗
Read僗僩儘乕僽偼丄IR_A偺FF偐傜嶌偭偰偄傑偡丅Write偲Read偼丄摨偠僗僥乕僕偱偼側偄偺偱丄僉儍僢僔儏懁偱傕僷僀僾儔僀儞傪帩偮昁梫偑偁傝傑偡丅
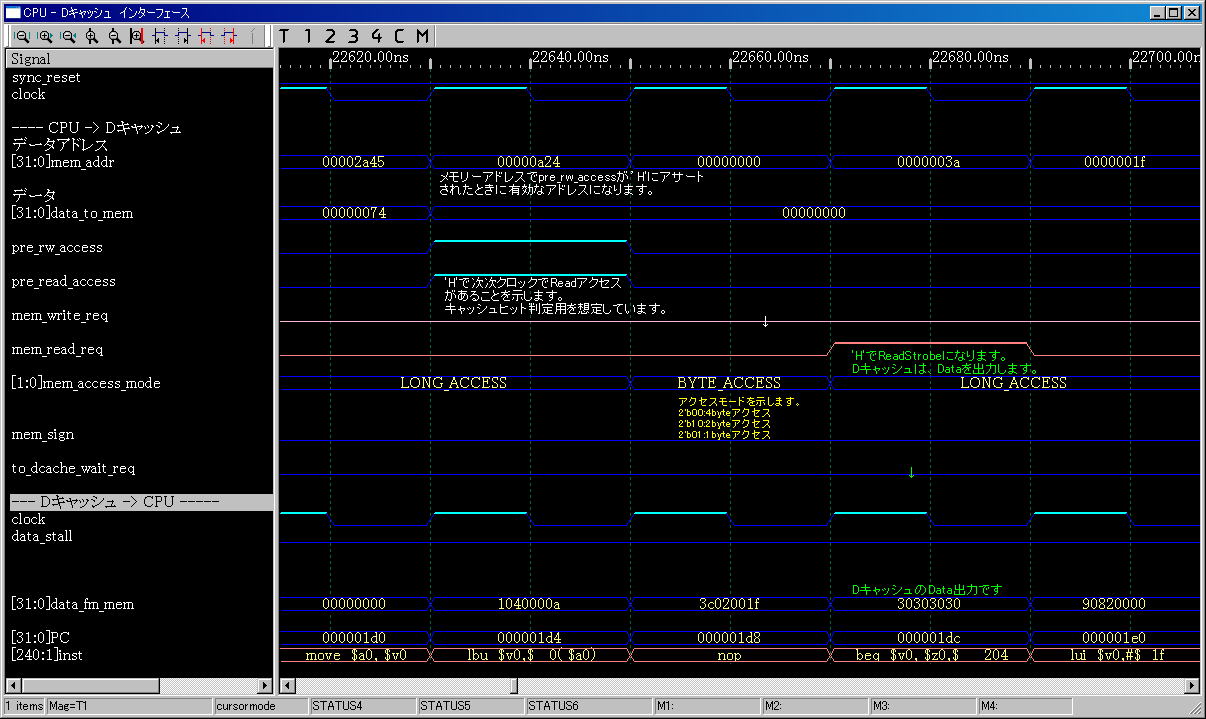
偦偺偨傔丄CPU懁偐傜偺Stall巜帵偲丄D僉儍僢僔儏懁偐傜Stall巜帵丄椉曽岦偺Stall偵懳墳偟偰偔偩偝偄丅
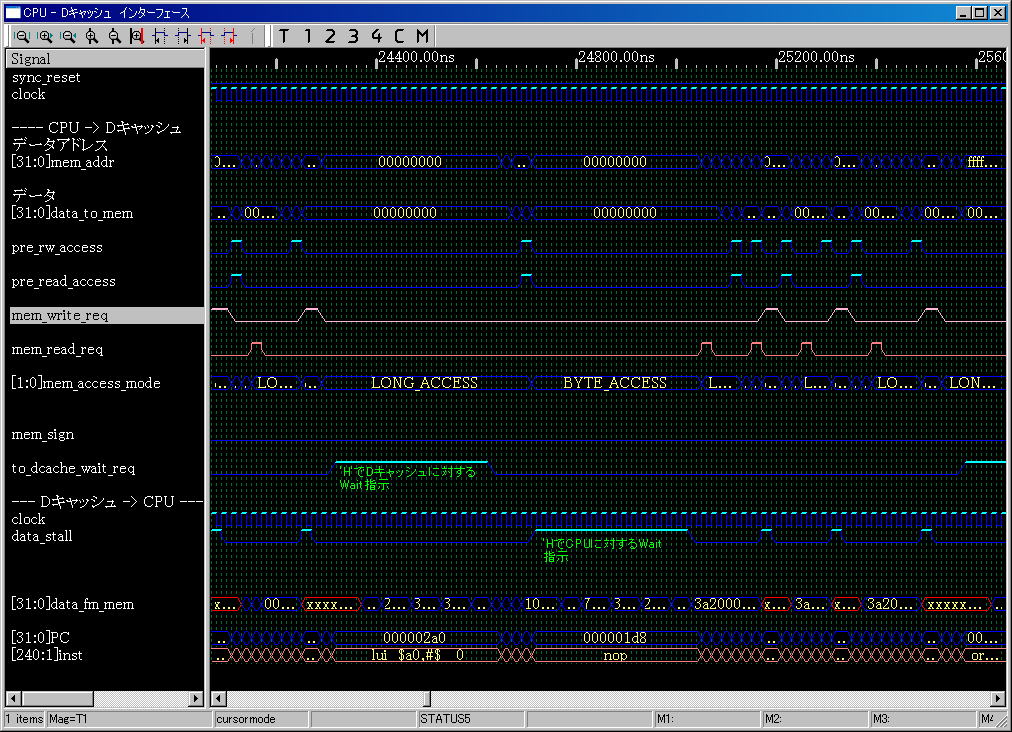
妱傝崬傒抂巕
儗儀儖僙儞僗偱'H'偱妱傝崬傒偱偡丅巊偄曽偼丄忋婰僐乕僪傪偛嶲徠偔偩偝偄丅
marsee偝傫偺DDR僐傾傪昡壙丒幚憰偟偰傒傞丅
DDR僐傾偲偟偰偼丄Xilinx偺EDK乮MCM俁乯丄Altera偺MegaWizard偱丄屄暿儀儞僟枅偵惗惉偝偣傞偙偲偼偱偒傑偡偑丄屄乆偺Primitive儔僀僽儔儕傪巊偆偨傔偵丄傎傏僽儔僢僋儃僢僋僗偲偟偰庢傝埖傢側偗傟偽側傜偢曌嫮梡偵偼側傝傑偣傫丅偟偐偟丄岾偄偵傕marsee偝傫偑DDR僐傾傪岞奐偝傟偰偄傑偡丅偙偺僐傾IP偼丄彜梡棙梡晄壜偱偼偁傝傑偡偑丄RTL偺擔杮岅僐儊儞僩晅偒偱彂偐傟偰偄傞偨傔丄撪晹摦嶌偺棟夝傪偟側偑傜摦偐偟偰傒傞偵偼偲偰傕傛偄偲巚偄傑偡丅傑偨丄YACC偺嵟廔栚昗偼丄OS忋偱摦偔偙偲偵偁傝傑偡偑丄偦偺偨傔偵偼丄峀戝側儊儌儕偑昁梫偱丄DDR僐儞僩儘乕儔IP偺巊梡偼丄昁恵偱偡丅
堦斒揑側IP偺巊梡庤弴偲偟偰偼丄
- 巇條偺妋擣
- 巊偄曽偺儅僗僞乕丂乮by RTL僔儈儏儗乕僔儑儞乯
- RTL昡壙乮昡壙僥僗僩儀儞僠嶌惉乯
- 僞僀儈儞僌昡壙
- 幚婡偵傛傞R/W僠僃僢僋
偱恑傒傑偡丅俆丏偱OK側傜丄忋偺僉儍僢僔儏僐儞僩儘乕儔偲愙懕偡傞偙偲偵側傝傑偡偑丄崱夞偼丄俆傑偱峴偆偙偲傪栚昗偵偟傑偡丅偪側傒偵昅幰偼丄DDR帺懱偼丄怗偭偨偙偲偑側偔IP偺巊梡偼丄弶傔偰偱偡丅傑偨丄DDR偼丄僞僀儈儞僌廃傝偑旕忢偵尩偟偄偙偲偑梊憐偝傟傞偺偱丄幚婡僠僃僢僋偼晄壜旔偱偡丅崱夞偼丄Spartan3E僗僞乕僞僉僢僩忋偱YACC丂CPU僐傾扨昳忋偱摦偔彫偝偄C僾儘僌儔儉傪嶌傝IP傪幚婡昡壙偟偰傒傑偟傚偆丅
丂DDR僐儞僩儘乕儔偲偼丄
丂丂昅幰偺峫偊傞DDR僐儞僩儘乕儔偲偼丄弌棃傞尷傝SRAM偺摦嶌偵嬤偄傕偺偱偡丅偮傑傝丄惂屼僶僗偲偟偰偼丄
- 傾僪儗僗巜掕
- 儕乕僪丄儔僀僩偺巜掕
丂丂屻偼丄僨乕僞僶僗丂
丂丂偑偁傟偽傛偄偙偲偵側傝傑偡丅
尵偄姺偊傞偲丄柺搢側DDR偲偺僐儈儏僯働乕僔儑儞僾儘僩僐儖丄儕僼儗僢僔儏摍傪塀暳偟偰偔傟偰丄儐乕僓偐傜尒傞偲丄媅帡SRAM僀儞僞乕僼僃乕僗偵偟偰偔傟傞傕偺偱偡丅偦偆偼尵偭偰傕丄巊梡忋偺惂栺偼晅偒暔偱偡偟丄幚嵺偄偔偮偐偺惂栺偲忋婰埲奜偺H/W僀儞僞乕僼僃乕僗偑懚嵼偟傑偡丅
1.巇條偺妋擣
丂僐儞僩儘乕儔IP偺巇條偵偮偄偰偼丄埲壓偺儁乕僕偱弎傋傜傟偰偄傑偡丅
丂丂http://marsee101.blog19.fc2.com/blog-entry-261.html
丂
丂IP偺僜乕僗偼丄
丂http://marsee101.blog19.fc2.com/blog-entry-413.html
丂偐傜僟僂儞儘乕僪偱偒傑偡丅偙偺儁乕僕偵彂偐傟偰偄傞僔儈儏儗乕僔儑儞娐嫬偺峔抸曽朄偵廬偭偰僔儈儏儗乕僔儑儞偟偰傒傑偟偨丅
偙偺SIM偱偼丄RegressionTest傪峴偄傗偡偄傛偆偵丄僆儕僕僫儖偐傜彂偒姺偊偰偄傑偡丅僥僗僩儀儞僠僩僢僾偲丄僴乕僪僂僃傾僩僢僾偺擇偮傪師偺僜乕僗偱抲偒姺偊偰傑偡丅
僴乕僪僂僃傾TOP乮崌惉奒憌TOP乯偱偡丅
// 僴乕僪TOP
//marsee偝傫偺丂module DDRtest(clk, reset, lcd_d, lcd_rs, lcd_rw, lcd_e, sf_ce0, rot_a, rot_b, rot_center, btn_east, btn_west, led, sd_a, sd_dq, sd_ba, sd_ras, sd_cas, sd_we, sd_udm, sd_ldm, sd_udqs, sd_ldqs, sd_cs, sd_cke, sd_ck_n, sd_ck_p, sd_ck_fb);
//偐傜夵憿丂Mar.3.2008丂Tak.Sugawara
//Mar.5.2008 clk100傪IF偵堷偒弌偟捛壛
//Mar.6.2008 HOST丂IF傪clk_out偵曄峏
//Mar.7.2008 reset 晄掕僶僌Fix
`timescale 1ns / 1ps
module ddr_controller(
input async_reset,//旕摨婜儕僙僢僩
//埲壓偺Host偐傜棃傞 僀儞僞乕僼僃乕僗 怣崋偼丄慡偰奜晹clk亖Xtal丂50MHz丂偵摨婜偟偰偄傞
//HOST傊偺OUTPUT偼丄100MHzPOS偵摨婜 壖憐
input clk_fm_host,
input [31:0] input_address_fm_host,input_data_fm_host,
input read_fm_host,write_fm_host,
input [3:0] byte_enable_fm_host,//彂偒崬傒僶僀僩Enable
output reg [31:0] output_data_fm_controller,
output reg fifo_full_fm_controller,//address full 傑偨偼丂Write丂Fifo丂Full
output reg read_valid_fm_controller,initialize_end_fm_controller,
output clk_out,//Mar.6.2008
//DDR 僀儞僞乕僼僃乕僗
output [12:0] sd_a,
inout [15:0] sd_dq,
output[1:0] sd_ba,
output sd_ras, sd_cas, sd_we, sd_udm, sd_ldm,
inout sd_udqs, sd_ldqs,
output sd_cs, sd_cke, sd_ck_n, sd_ck_p,
input sd_ck_fb);
`include "./ddr_cont_parameters.vh"
wire clk50 ,clk100;//Mar.6.2008
wire logic0, logic1;
wire dcm_locked;
reg [INTERFACE_DATA_WIDTH-1 : 0] input_data;
reg [INTERFACE_MASK_WIDTH-1 : 0] input_mask;
reg read_write;
reg [USER_INPUT_ADDRESS_WIDTH-1 : 0] input_address;
reg reset;
reg addr_fifo_wren;
reg wrdata_fifo_wren;
wire addr_fifo_full;
wire wrdata_fifo_full;
wire rddata_valid;
wire initialize_end;
wire [QUANTITY_OF_CLK_OUTPUT-1 : 0] ddr_clk;
wire [QUANTITY_OF_CLK_OUTPUT-1 : 0] ddr_clkb;
wire ddr_cke;
wire [DDR_DQS_DM_WIDTH-1 : 0] ddr_dqs;
wire [DDR_DATA_WIDTH-1 : 0] ddr_dq;
wire ddr_csb;
wire ddr_rasb;
wire ddr_casb;
wire ddr_web;
wire [DDR_DQS_DM_WIDTH-1 : 0] ddr_dm;
wire [1:0] ddr_ba;
wire [DDR_ADDRESS_WIDTH-1 : 0] ddr_address;
wire [15:0] DDR_write_data, DDR_read_data;
wire read_ddr_cont;
wire [INTERFACE_DATA_WIDTH-1 : 0] output_data;
reg read_write_node, addr_fifo_wren_node, wrdata_fifo_wren_node;
wire reset_ddr_cont;
assign logic0 = 1'b0;
assign logic1 = 1'b1;
dcm100 dcm100_inst(
.CLKIN_IN(clk_fm_host),
.RST_IN(logic0),
.CLKIN_IBUFG_OUT(),
.CLK0_OUT(clk50),
.CLK2X_OUT(clk100),
.LOCKED_OUT(dcm_locked)
);
assign reset_ddr_cont = reset | (~dcm_locked);
ddr_sdram_cont ddr_sdram_cont_inst (
.clk_in(clk100),
.clk_out(clk_out),
.clk_fb(sd_ck_fb),
.reset(reset_ddr_cont),
.input_data(input_data),
.input_mask(input_mask),
.read_write(read_write),
.output_data(output_data),
.input_address(input_address),
.addr_fifo_wren(addr_fifo_wren),
.wrdata_fifo_wren(wrdata_fifo_wren),
.addr_fifo_full(addr_fifo_full),
.wrdata_fifo_full(wrdata_fifo_full),
.rddata_valid(rddata_valid),
.initialize_end(initialize_end),
.ddr_clk(ddr_clk),
.ddr_clkb(ddr_clkb),
.ddr_cke(ddr_cke),
.ddr_dqs({sd_udqs, sd_ldqs}),
.ddr_dq(sd_dq),
.ddr_csb(ddr_csb),
.ddr_rasb(ddr_rasb),
.ddr_casb(ddr_casb),
.ddr_web(ddr_web),
.ddr_dm(ddr_dm),
.ddr_ba(ddr_ba),
.ddr_address(ddr_address)
);
//Host 偵曉偡儔僀儞偼丄慡偰clk100 仾偵摨婜偝偣傞
always @(*) begin//Mar.6.2008
output_data_fm_controller = output_data;
fifo_full_fm_controller =wrdata_fifo_full | addr_fifo_full;
read_valid_fm_controller =rddata_valid;
output_data_fm_controller =output_data;
initialize_end_fm_controller =initialize_end;
end
//Host偐傜棃傞僨乕僞偼丄慡偰clk100丂INPUT丂SCEW懳嶔偺伀偵摨婜偝偣傞丅Input丂Scew偼丄2.5ns傑偱戝忎晇丅
always @(negedge clk_out) begin
input_mask <= ~byte_enable_fm_host;
input_data <= input_data_fm_host;
input_address<=input_address_fm_host;
read_write <=!write_fm_host;
end
//Mar.8.2008
always @(*) begin
reset=async_reset;
end
always @(*) begin //Mar.6.2008 negedge clk100,posedge async_reset) begin
if (async_reset) begin
addr_fifo_wren=0;
end else if (!addr_fifo_wren && (write_fm_host || read_fm_host) ) begin
addr_fifo_wren=1;
end else begin
addr_fifo_wren=0;
end
end
//clk_out偱摨婜偝偣傞偺偱攑巭 Host 50MHz偵懳偟僐儞僩儘乕儔偼丄100MHz側偺偱丄50MHz侾CLK丂偑100MHz偱偼2CLK偵側偭偰偟傑偆丅偦偺曗彏夞楬
always @(*) begin //Mar.6.2008 negedge clk100,posedge async_reset) begin
if (async_reset) begin
wrdata_fifo_wren=0;
end else if (!wrdata_fifo_wren && write_fm_host) begin
wrdata_fifo_wren=1;
end else begin
wrdata_fifo_wren=0;
end
end
assign sd_ck_n = ddr_clkb[0];
assign sd_ck_p = ddr_clk[0];
assign sd_cke = ddr_cke;
assign sd_cs = ddr_csb;
assign sd_a = ddr_address;
assign sd_ras = ddr_rasb;
assign sd_cas = ddr_casb;
assign sd_we = ddr_web;
assign sd_udm = ddr_dm[1];
assign sd_ldm = ddr_dm[0];
assign sd_ba = ddr_ba;
endmodule
僥僗僩儀儞僠TOP偱偡丅
僥僗僩儀儞僠偺僟僂儞儘乕僪
僴乕僪僂僃傾僩僢僾偺僟僂儞儘乕僪
// DDRtest_tb.v
//`default_nettype none
//Mar.4.2008 Tak.Sugawara marsee偝傫偺僥僗僩儀儞僠TOP傪RegressionTest偑偟傗偡偄傛偆偵彂偒姺偊偨丅
//Mar.4.2008 Test曽朄捛壛廋惓
//Mar.5.2008 Random W/R with burst access 捛壛
//Mar.6.2008 lfsr22僶僌廋惓丂burst_words傪儔儞僟儉偵偡傞僥僗僩捛壛
//Mar.6.2008 sim_clock傪clk_out偵摑堦丂Timeout Check捛壛
//Mar.7.2008 random routine w/random butst length傪僞僗僋壔
//Mar.9.2008 FIFO懸偪僶僌廋惓
//TODO burst read/write test with random pending time
`timescale 1ps / 1ps
module DDRtest_tb;
`include "ddr_parameters.vh"
wire [DQ_BITS-1:0] dq;
wire [DQS_BITS-1:0] dqs;
reg async_reset;
wire [DQS_BITS-1:0] ddr_dqs_fpga, ddr_dqs_sdram;
wire [DQ_BITS-1:0] ddr_dq_fpga, ddr_dq_sdram;
reg [DQS_BITS-1:0] ddr_dqs_fpgan, ddr_dqs_sdramn;
reg [DQ_BITS-1:0] ddr_dq_fpgan, ddr_dq_sdramn;
wire ddr_clk, ddr_clkb;
wire ddr_cke, ddr_csb, ddr_rasb, ddr_casb, ddr_web;
wire [DM_BITS-1:0] ddr_dm;
wire [1:0] ddr_ba;
wire [ADDR_BITS-1:0] ddr_address;
wire reset_b;
reg enable_o;
wire [2:0] cmd;
reg sdram_clk;
reg sdram_clkb;
reg [12:0] sdram_address;
reg [1:0] sdram_ba;
reg sdram_cke;
reg sdram_csb, sdram_rasb, sdram_casb, sdram_web;
reg [1:0] sdram_dm;
wire ddr_clk_fb;
parameter DELAY_TIME = 1500;
parameter CLK_PERIOD = 20000;
assign cmd = {ddr_rasb, ddr_casb, ddr_web};
always @(posedge ddr_clk, posedge async_reset)
if (async_reset)
enable_o <= 1'b0;
else
if (cmd==3'b100)
enable_o <= 1'b0;
else if (cmd==3'b101)
enable_o <= 1'b1;
always @ *
if (enable_o == 1'b1)
ddr_dqs_fpgan <= #DELAY_TIME ddr_dqs_sdram;
else
ddr_dqs_fpgan <= #DELAY_TIME {DQS_BITS{1'bz}};
always @ *
if (enable_o == 1'b1)
ddr_dq_fpgan <= #DELAY_TIME ddr_dq_sdram;
else
ddr_dq_fpgan <= #DELAY_TIME {DQ_BITS{1'bz}};
always @ *
if (enable_o == 1'b0)
ddr_dqs_sdramn <= #DELAY_TIME ddr_dqs_fpga;
else
ddr_dqs_sdramn <= #DELAY_TIME {DQS_BITS{1'bz}};
always @ *
if (enable_o == 1'b0)
ddr_dq_sdramn <= #DELAY_TIME ddr_dq_fpga;
else
ddr_dq_sdramn <= #DELAY_TIME {DQ_BITS{1'bz}};
assign ddr_dqs_fpga = ddr_dqs_fpgan;
assign ddr_dq_fpga = ddr_dq_fpgan;
assign ddr_dqs_sdram = ddr_dqs_sdramn;
assign ddr_dq_sdram = ddr_dq_sdramn;
always @ * begin
sdram_clk <= #DELAY_TIME ddr_clk;
sdram_clkb <= #DELAY_TIME ddr_clkb;
sdram_address <= #DELAY_TIME ddr_address;
sdram_ba <= #DELAY_TIME ddr_ba;
sdram_cke <= #DELAY_TIME ddr_cke;
sdram_csb <= #DELAY_TIME ddr_csb;
sdram_rasb <= #DELAY_TIME ddr_rasb;
sdram_casb <= #DELAY_TIME ddr_casb;
sdram_web <= #DELAY_TIME ddr_web;
sdram_dm <= #DELAY_TIME ddr_dm;
end
//Host IF
reg clk_fm_host=0;
reg [31:0] address_fm_host=0,input_data_fm_host=0;
reg read_fm_host=0,write_fm_host=0;
reg [3:0] byte_enable_fm_host=4'hf;//彂偒崬傒僶僀僩Enable
wire [31:0] output_data_fm_controller;
wire fifo_full_fm_controller;//address full 傑偨偼丂Write丂Fifo丂Full
wire read_valid_fm_controller;
wire initialize_end_fm_controller;
wire clk_out;
ddr_controller hardware_top(
//旕摨婜儕僙僢僩
.async_reset(async_reset),
//Host->僐儞僩儘乕儔
.clk_fm_host(clk_fm_host),
.input_address_fm_host(address_fm_host),
.input_data_fm_host(input_data_fm_host),
.read_fm_host(read_fm_host),
.write_fm_host(write_fm_host),
.byte_enable_fm_host(byte_enable_fm_host),//彂偒崬傒僶僀僩Enable
//僐儞僩儘乕儔-> Host
.clk_out(clk_out),
.output_data_fm_controller(output_data_fm_controller),
.fifo_full_fm_controller(fifo_full_fm_controller),//address full 傑偨偼丂Write丂Fifo丂Full
.read_valid_fm_controller(read_valid_fm_controller),
.initialize_end_fm_controller(initialize_end_fm_controller),
.sd_a(ddr_address),
.sd_dq(ddr_dq_fpga),
.sd_ba(ddr_ba),
.sd_ras(ddr_rasb),
.sd_cas(ddr_casb),
.sd_we(ddr_web),
.sd_udm(ddr_dm[1]),
.sd_ldm(ddr_dm[0]),
.sd_udqs(ddr_dqs_fpga[1]),
.sd_ldqs(ddr_dqs_fpga[0]),
.sd_cs(ddr_csb),
.sd_cke(ddr_cke),
.sd_ck_n(ddr_clkb),
.sd_ck_p(ddr_clk),
.sd_ck_fb(ddr_clk_fb)
);
assign ddr_clk_fb = ddr_clk;
ddr MT46V16M16_inst(
.Dq(ddr_dq_sdram),
.Dqs(ddr_dqs_sdram),
.Addr(sdram_address),
.Ba(sdram_ba),
.Clk(sdram_clk),
.Clk_n(sdram_clkb),
.Cke(sdram_cke),
.Cs_n(sdram_csb),
.Ras_n(sdram_rasb),
.Cas_n(sdram_casb),
.We_n(sdram_web),
.Dm(sdram_dm)
);
initial begin
async_reset = 1'b0;
#1000 async_reset = 1'b1;
#20000 async_reset = 1'b0;
end
always begin
#(CLK_PERIOD/2) clk_fm_host = 1'b1 ;
#(CLK_PERIOD/2) clk_fm_host = 1'b0 ;
end
reg [31:0] read_fifo [0: 2**23-1];//24bit fifo
//僥僗僩儊僀儞儖乕僾
initial begin
$timeformat(-9,1,"nsec",8);
//弨旛偑偱偒傞傑偱懸偮
initial_wait;
//僔儞僌儖儔僀僩/儕乕僪
check_random_single_write_read(10);
//僀儞僋儕儊儞僞儖僠僃僢僋
check_incremental_single_write_read(10);
//僶乕僗僩丂儔僀僩/儕乕僪丂屌掕傾僪儗僗
burst_check_fixed_pattern(0,10,32'h5555_5555);//
burst_check_fixed_pattern(0,258,32'hAAAA_AAAA);//
//僶乕僗僩丂儔僀僩/儕乕僪丂儔儞僟儉傾僪儗僗
random_write_read_w_random_bust_length(100000,19);//儖乕僾悢丂,嵟戝僷乕僗僩挿+1傪僙僢僩丂Mar.7.2009 20埲忋偼巇條奜丠丠
#1000000 $finish;
end
task random_write_read_w_random_bust_length(input integer counts,max_words);
reg [23:0] seed_address,write_temp_address,read_temp_address;
integer seed_data,write_temp_data,read_temp_data;
integer burst_words,burst_words_seed;
integer test_counter;
begin
seed_address=1<<2;
seed_data=1;
write_temp_address=seed_address;
write_temp_data=seed_data;
read_temp_address=seed_address;
read_temp_data=seed_data;
burst_words_seed=1;
burst_words=burst_words_seed;
test_counter=0;
repeat(counts) begin
$display("Start burst write random burst_words=%d %t",burst_words,$time);
burst_write_random(write_temp_address,write_temp_data,burst_words);
//$display("Start burst read random %t",$time);
burst_read_random(read_temp_address,burst_words);
burst_read_check_random(read_temp_data ,burst_words);
test_counter=test_counter+1;
if (test_counter%100==0) $display("Pass %d",test_counter);
burst_words_seed=lfsr8(burst_words_seed);
if(burst_words_seed> max_words) begin
burst_words=burst_words_seed% max_words;
if (!burst_words) burst_words=1;
end
end
end
endtask
task initial_wait;
begin
#10;
wait(initialize_end_fm_controller);
end
endtask
task check_random_single_write_read(input integer counts);
integer address,write_data,read_data;
begin
$display("Start check_random_single_write_read %t",$time);
repeat(counts) begin
address=$random;
write_data=$random;
single_write(address,write_data);
single_read(address,read_data);
if (write_data !==read_data) begin
$display("In check_random_single_write_read. Error Detected address=%h wd=%h rd=%h",address,write_data,read_data);
$stop;
end
end
end
endtask
task check_incremental_single_write_read(input integer counts);
integer address,write_data,read_data;
begin
$display("Start check_inc_single_write_read %t",$time);
address=0;
write_data=0;
repeat(counts) begin
single_write(address,write_data);
single_read(address,read_data);
if (write_data !==read_data) begin
$display("In check_inc_single_write_read. Error Detected address=%h wd=%h rd=%h",address,write_data,read_data);
$stop;
end
address=address+4;
write_data=write_data+1;
end
end
endtask
task single_write(input integer address,data);
begin
wait(!fifo_full_fm_controller);
@(negedge clk_out);
write_fm_host=1;
input_data_fm_host=data;
address_fm_host=address;
@(negedge clk_out);
write_fm_host=0;
input_data_fm_host=data;
end
endtask
task single_read(input integer address,
output [31:0] data);
begin
wait(!fifo_full_fm_controller );//僐儞僩儘乕儔偑Busy側傜懸偮
@(negedge clk_out);//Here we go両丂儕乕僪僐儅儞僪彂偒崬傒//Mar.6.2008 clk_out偵曄峏
read_fm_host=1;
address_fm_host=address;
@(negedge clk_out);//Mar.6.2008 clk_out偵曄峏
read_fm_host=0;
wait(read_valid_fm_controller);//僨乕僞偑棃傞偺傪懸偮
@(negedge clk_out);//拝偨
data=output_data_fm_controller;//撉傒崬傒
end
endtask
task burst_check_fixed_pattern(input integer address,counts,data);
begin
burst_write_fixed(address,counts,data);
burst_read(address,counts);
burst_read_check_fixed(address,counts);
end
endtask
function [21:0] lfsr22 (input [21:0] data);
reg lsb;
//M宯楍僞僢僾抣偼丄埲壓偐傜捀偒傑偟偨丅
//http://www.madlabo.com/mad/edat/mathematic/M/index.htm#SEC5
//200001
//0010_0000_0000_0000_0000_0011
begin
lsb=data[21] ^ data[1]^data[0];
lfsr22={data[20:0],lsb};//MSB 曽岦偵僔僼僩
end
endfunction
function [7:0] lfsr8 (input [7:0] data);
reg lsb;
//CD polynominal
//1001_1101
begin
lsb=data[7] ^ data[4]^data[3] ^data[2]^data[0];
lfsr8={data[6:0],lsb};//MSB 曽岦偵僔僼僩
end
endfunction
//24價僢僩偺僟僽傜側偄儔儞僟儉傾僪儗僗傪摼傞丂
//4bytes boundary 0偼丄晄壜
function [23:0] get_next_random_address ( input [23:0] old_address);
//assert( !old_address);
get_next_random_address=lfsr22(old_address >>2) <<2;
endfunction
task burst_write_random(inout integer seed_address,seed_data ,input integer counts);
integer counter;
begin
//assert(read_fm_host==0);
//儔僀僩僐儅儞僪傪counts暘憲弌
counter=0;
repeat(counts) begin
@(negedge clk_out);
if (fifo_full_fm_controller) begin
write_fm_host=0;
wait(!fifo_full_fm_controller);
@(negedge clk_out);
end
write_fm_host=1;
input_data_fm_host=seed_data;
address_fm_host =seed_address;
seed_address=get_next_random_address(seed_address);
seed_data=$random(seed_data);
counter=counter+1;
end
@(negedge clk_out);
write_fm_host=0;
//儔僀僩僐儅儞僪憲弌廔傢傝
end
endtask
task burst_write_fixed(input integer address,counts,data);
integer counter;
begin
//assert(read_fm_host==0);
//儔僀僩僐儅儞僪傪counts暘憲弌
counter=0;
repeat(counts) begin
@(negedge clk_out);//Mar.6.2008 clk_out偵曄峏
if (fifo_full_fm_controller) begin
write_fm_host=0;
wait(!fifo_full_fm_controller);
@(negedge clk_out);
end
write_fm_host=1;
input_data_fm_host=data;
address_fm_host=address+(counter<<2);
counter=counter+1;
end
@(negedge clk_out);
write_fm_host=0;
//儔僀僩僐儅儞僪憲弌廔傢傝
end
endtask
`define TIMEOUT_CLKS 50 //*10ns* burst_words
task time_out_check_fifo(input integer counts);
begin :time_out_exit
repeat(`TIMEOUT_CLKS*counts ) begin
if (fifo_full_fm_controller) begin//Mar.9.2008
@(negedge clk_out);
end else begin
@(negedge clk_out);
disable time_out_exit;//repeat 儖乕僾傪敳偗傞
end
end
//`TIME_COUT_COUNT CLK 宱偭偰傕FIFO丂BUSY側傜僄儔-偩丅
$display("Time Out Error Please Check H/W Logic %t",$time);
$stop;
end
endtask
task time_out_check_read_valid(input integer counts);
begin :time_out_exit
repeat(`TIMEOUT_CLKS *counts) begin
if (!read_valid_fm_controller) begin
@(negedge clk_out);
end else begin
//@(negedge clk_out);
disable time_out_exit;//repeat 儖乕僾傪敳偗傞
end
end
//`TIME_COUT_COUNT CLK 宱偭偰傕FIFO丂BUSY側傜僄儔-偩丅
$display("Time Out Error Please Check H/W Logic %t",$time);
$stop;
end
endtask
task burst_read(input integer address,counts);
integer send_counter,read_counter;
begin
send_counter=0;//Mar.6.2008
//assert(read_fm_host==0);
//儕乕僪僐儅儞僪傪counts暘憲弌
//assert(!read_valid_fm_controller);
fork//僐儅儞僪傪憲偭偰偄傞娫偵傕ReadValid偼棃傞偺偱憲怣偲庴怣偼丄暯峴僾儘僙僗偱側偗傟偽側傜側偄丅
begin
repeat(counts) begin
@(negedge clk_out);//Mar.6.2008 clk_out偵曄峏
if (fifo_full_fm_controller) begin
read_fm_host=0;
time_out_check_fifo(counts);//Mar.6.2008 僞僀儉傾僂僩僠僃僢僋捛壛
//wait(!fifo_full_fm_controller);
//@(negedge clk_out);
end
read_fm_host=1;
address_fm_host=address+(send_counter<<2);
send_counter=send_counter+1;
end
@(negedge clk_out);
read_fm_host=0;
//儕乕僪僐儅儞僪憲弌廔傢傝
end
//儕乕僪僨乕僞傪counts暘撉傒崬傓
begin
read_counter=0;
wait(send_counter !==0);//Mar.6.2008 Timeout Check 偺偨傔
repeat(counts) begin
@(negedge clk_out);//Read 撉傒崬傒偼丄100MHz偱棃傞偺偱100MHz偱庴偗傞
if (!read_valid_fm_controller) begin
time_out_check_read_valid(counts);//Mar.6.2008僞僀儉傾僂僩僠僃僢僋捛壛
//wait(read_valid_fm_controller);
//@(negedge clk_out);//Read 撉傒崬傒偼丄100MHz偱棃傞偺偱100MHz偱庴偗傞
end
read_fifo[read_counter]=output_data_fm_controller;
read_counter=read_counter+1;
end
end
join
end
endtask
task burst_read_check_fixed(input integer counts,data);
integer counter;
begin
counter=0;
repeat(counts) begin
if (read_fifo[counter] !==data) begin
$display("Error Detected burst_read_check_fixed %t",$time);
$stop;
end
counter=counter+1;
end
end
endtask
task burst_read_check_random(inout integer seed_data,input integer counts);
integer counter;
begin
counter=0;
repeat(counts) begin
if (read_fifo[counter] !==seed_data) begin
$display("Error Detected burst_read_check_random %t %h %h ",$time,read_fifo[counter],seed_data);
$stop;
end
counter=counter+1;
seed_data=$random(seed_data);
end
end
endtask
task burst_read_random(inout integer seed_address,input integer counts);
integer send_counter,read_counter;
begin
send_counter=0;
//assert(read_fm_host==0);
//儕乕僪僐儅儞僪傪counts暘憲弌
//assert(!read_valid_fm_controller);
fork//僐儅儞僪傪憲偭偰偄傞娫偵傕ReadValid偼棃傞偺偱憲怣偲庴怣偼丄暯峴僾儘僙僗偱側偗傟偽側傜側偄丅
begin
repeat(counts) begin
@(negedge clk_out);//Mar.6.2008 clk_out偵曄峏
if (fifo_full_fm_controller) begin
read_fm_host=0;
wait(!fifo_full_fm_controller);
@(negedge clk_out);
end
read_fm_host=1;
address_fm_host=seed_address;
seed_address=get_next_random_address(seed_address);
send_counter=send_counter+1;
end
@(negedge clk_out);
read_fm_host=0;
//儕乕僪僐儅儞僪憲弌廔傢傝
end
//儕乕僪僨乕僞傪counts暘撉傒崬傓
begin
read_counter=0;
wait(send_counter !==0);//Mar.6.2008 Timeout Check 偺偨傔
repeat(counts) begin
@(negedge clk_out);//Read 撉傒崬傒偼丄100MHz偱棃傞偺偱100MHz偱庴偗傞
if (!read_valid_fm_controller) begin
time_out_check_read_valid(counts);//Mar.6.2008 僞僀儉傾僂僩僠僃僢僋捛壛
//wait(read_valid_fm_controller);
//@(negedge clk_out);//Read 撉傒崬傒偼丄100MHz偱棃傞偺偱100MHz偱庴偗傞
end
read_fifo[read_counter]=output_data_fm_controller;
read_counter=read_counter+1;
end
end
join
end
endtask
endmodule
僥僗僩儀儞僠夝愢
彮偟桳堄媊側儀儞僠偐傕偟傟傑偣傫偺偱夝愢偟傑偡丅
(1) task偵偟偨偄丅偟偐偟暯峴僾儘僙僗偺応崌偳偆婰弎偡傞?
傾僪儗僗僨乕僞憲弌拞偱偁偭偰傕丄rddata_valid偼100MHz偱楢懕揑偵棃傑偡丅壓偺僞僀儉僠儍乕僩偺傛偆偵丄addr_fifo_wren偱傾僪儗僗憲弌拞偱偁偭偰傕丂rddata_valid偑傾僒乕僩偟偰偄傞偺偑傢偐傝傑偡丅rdata_valid偑拝偨偲偒偵偡偖偵僨乕僞傪儔僢僠偟側偄偲僨乕僞傪幐偭偰偟傑偄傑偡丅乮昅幰傕嵟弶偙傟傪僔乕働儞僔儍儖偱彂偄偰偄偰僐儞儁傾僄儔乕偵側偭偰偟傑偄傑偟偨丅乯
偮傑傝丄憲怣偲庴怣偼暯峴僾儘僙僗偱側偗傟偽側傝傑偣傫丅偙偆偄偆偲偒偼丄忋偺傛偆偵丂fork join偱婰弎偱婰弎偟傑偡丅偙偺応崌丂傾僪儗僗梫媮悢偲丄ACK偲偟偰偺rddata_valid 悢偼丄忢偵堦抳偟偰偄傞敜偱偡丅偳偪傜偺僾儘僙僗傕廔椆偟偨偲偒偵丄乮偮傑傝丄傾僪儗僗憲怣偺寢壥丄慡晹rddata_valid傪庴偗庢偭偰乯堦偮偺偍巇帠乮task乯偑姰椆(join)偟偨偲峫偊傑偡丅fork join偵偮偄偰偼丄EDA EXPRESS偝傫偺偙偺帒椏偑暘偐傝傗偡偄偱偡丅
乮俀乯wait 偭偰壗丠
偲偙傠偱丄wait 偲偄偆峔暥偼丄夝愢偟偨偙偲偑偁傝傑偣傫偱偟偨丅@乮倶倶 乯偼丄僄僢僕僙儞僗偱僽儘僢僉儞僌乮偮傑傝丄偦偺峔暥偵弌夛偆偲僗儖乕偟側偄偱丄曄壔傪懸偪傑偡丅偄傢偽僄僢僕僙儞僔僥傿僽偱偡丅偲偙傠偑丄wait偼丄儗儀儖僙儞僔僥傿僽偱丄偦偺怣崋忬懺偑True偩偲僽儘僢僉儞僌偟傑偣傫丅乮慺捠傝偟傑偡乯丂丂
乮俁乯僟僽傝偺側偄儔儞僟儉傾僪儗僗傪嶌傝偨偄
丂M宯楍乮LFSR)偱嶌傝傑偡丅僟僽傝偺側偄傾僪儗僗惗惉偵偼嵟揔偱偡丅偨偩偟丄0偼塱媣偵0偐傜敳偗弌傞偙偲偑側偄偺偱偦傟埲奜偺堦弰偵側傝傑偡丅僜乕僗拞偺僒僀僩傪嶲徠偡傟偽丄30價僢僩傑偱偺僞僢僾埵抲偼暘偐傝傑偡丅
乮係乯$random傪惂屼偟偨偄
丂擟堄偺儔儞僟儉傾僪儗僗偵儔儞僟儉傪彂偄偰丄楢憐攝楍偱妎偊偰偍偔偺傕庤偱偡偑丄偙偙偱偼丄Seed=$random乮Seed乯傪巊偭偰丄儔僀僩偲儕乕僪帪偱摨偠僔乕働乕儞僗偵側傞傛偆偵偟偰偟偰偄傑偡丅偦傟傪僐儞儁傾偡傞偙偲偱攝楍傪巊傢偢偵偡傒傑偡丅DDR摍丄嫄戝側儊儌儕傪挿帪娫僥僗僩傪偡傞偲偒偵巊偊傞庤偐傕偟傟傑偣傫丅task撪偱偼丄儘乕僇儖曄悢偵側傝傑偡偐傜ta倱倠偐傜敳偗傞偲偒偵尰嵼偺Seed抣傪妎偊偰偍偔昁梫偑偁傝傑偡偹丅偦偆偄偆応崌偼丄task堷悢傪inout
偵偟偰丄task偐傜敳偗傞偲偒偵彂偒栠偟偰傗傝傑偡丅偙偺傛偆偵偟偰Seed僔乕働儞僗傪宲懕偝偣傞偙偲偑偱偒傑偡丅偟偐偟丄$random偼丄僨僓僀儞慡懱偵搉傞僌儘乕僶儖Static曄悢偱僀儞僗僞儞僗僆僽僕僃僋僩偺奣擮偑揔梡偱偒傑偣傫丅側偺偱丄偦偺傎偐偵丄儔儞僟儉抣傪巊偄偨偄偲偒偼丄強朷偺價僢僩暆偺LFSR傪嶌惉偟偰儔儞僟儉抣傪摼傞傛偆偵偟偰偄傑偡丅乮SV僋儔僗側傜僄儗僈儞僩偵彂偗偦偆偱偡偑丅乯
忋偺儀儞僠偱偼丄ddr_parameter.vh 傪師偺傛偆偵愝掕偟偰偄傑偡丅 "FULL_MEM偱側偄!"偲DDR偑暥嬪傪尵偭偰偒偨偺偱擖傟傑偟偨丅乮恊愗側儌僨儕儞僌IP偱偡偹丅乯丂傑偨丄DEBUG傪0偵偡傞偺偼丄僐儞僜乕儖偵戝検偵儊僢僙乕僕乮Verbose)偝傟傞偺傪杊偖偨傔偱偡丅偙偺傛偆偵偟偰傕僄儔乕偺偲偒偼丄偪傖傫偲弌偰偒傑偡丅
parameter DEBUG = 0; //TAK Turn on DEBUG message `define FULL_MEM //TAK
幚婡専徹娐嫬偺峔抸
丂埲壓偼丄幚婡傪梡偄偨専徹僀儊乕僕偱偡丅
FPGA撪憼偺SRAM偵彫偝偄C僾儘僌儔儉傪抲偒丄Wishbone僶僗傪夘偟偰YACC偑摦偒傑偡丅専徹僐傾偼丄丂僉儍僢僔儏傪夘偝側偄IO億乕僩椞堟偵揔摉偵MAP偟傑偡丅
儂僗僩PC偲UART傪夘偟僐儅儞僪傗僷儔儊乕僞偺憲怣丄寢壥乮僄儔乕儗乕僩乯偺昞帵傪峴偄傑偡丅栤戣偼丄専徹僐傾埲慜偵偦傟埲奜偺CPU傪娷傓僽儘僢僋偼丄堦愗幚婡偱摦偐偟偨偙偲偑側偄偙偲偱偡丅傑偢丄専徹僐傾埲奜偺僽儘僢僋偼丄愝寁偲専徹偑昁梫偱偡偹丅壥偨偟偰摦偔偱偟傚偆偐丠
偲偙傠偱丄尰忬偼丄FIFO晅偒UART億乕僩偲SRAM偼丄愙懕偟偰偄傑偣傫丂丅傑偢偦傟傜傪偮側偖偙偲偑昁梫偱偡丅UartRead偼丄CPU偺妱傝崬傒抂巕偵偮側偓妱傝崬傒張棟偡傞偙偲傕昁梫偱偡丅偲傝偁偊偢偼丄偙傟傪偮側偄偩RTL傪嶌惉偟僔儈儏儗乕僔儑儞偵傛傞専徹傪峴偆偙偲偵偟傑偡丅
SRAM偺愙懕
丂Xilinx丂Spartan3E僉僢僩側偺偱丄Xilinx偺CoreGen偱RAM傪惗惉偝偣傑偡丅偦偺嵺弶婜壔僼傽僀儖偲偟偰C僐儞僷僀儖Utility偑惗惉偟偨Coe僼傽僀儖傪巜掕偟傑偡丅偙傟偱RAM傪惗惉偝偣傞偲師偺傛偆側婰弎偱惗惉偝傟傑偡丅SRAM偼丄僶僀僩暆偱俉K惗惉偝偣傑偡丅1WORD=4BYTE側偺偱崌寁4屄偱32KB偺RAM惗惉偵側傝傑偡丅
偝偰丄偙偺屻丄C僐儞僷僀儖->僔儈儏儗乕僔儑儞傪壗夞偐偡傞偙偲偵側傝傑偡偑丄偦偺偨傃偵偄偪偄偪CoreGen偱RAM弶婜抣傪巜掕偟偰惗惉偝偣傞偺偼柺搢偱偡偟帪娫偑偐偐傝傑偡偺偱C僐儞僷僀儖Utility偱偼丄偙偺RAM偑屇傃弌偟偰偄傞幚幙偺mif僼傽僀儖傕堦弿偵惗惉偡傞傛偆偵偟偰偄傑偡丅乮Altera偺MIF偲偼堘偄傑偡丅unisim儔僀僽儔儕偼丄偙傟傪$readmemb偱撉傓偩偗偱偡丅乯偮傑傝悧宍偩偗CoreGen偱惗惉偝偣偰拞恎偼偡傝懼偊偰僔儈儏儗乕僔儑儞偟傑偡丅偨偩偟丄榑棟崌惉偼偁偔傑偱丄CoreGen偱惗惉偟偨帪揰偺NGC僼傽僀儖傪巊偄傑偡偺拲堄偟偰偔偩偝偄丅
module ram8k0(
addr,
clk,
din,
dout,
we);
input [12 : 0] addr;
input clk;
input [7 : 0] din;
output [7 : 0] dout;
input we;
// synthesis translate_off
BLKMEMSP_V6_2 #(
.c_addr_width(13),
.c_default_data("0"),
.c_depth(8192),
.c_enable_rlocs(0),
.c_has_default_data(0),
.c_has_din(1),
.c_has_en(0),
.c_has_limit_data_pitch(0),
.c_has_nd(0),
.c_has_rdy(0),
.c_has_rfd(0),
.c_has_sinit(0),
.c_has_we(1),
.c_limit_data_pitch(18),
.c_mem_init_file("ram8k0.mif"),..
UART偺愙懕
丂嵟嬤偼丄僔儕傾儖億乕僩偺側偄PC偑憹偊偰巆擮側偺偱偡偑丄慻傒崬傒偺尰応偱偼傑偩傑偩尰栶偱偼側偄偱偟傚偆偐丠丂
丂媽YACC僾儘僕僃僋僩偱嶌偭偨UART傪偦偺傑傑巊偄傑偡丅偙偺UART偼丄WRITE丂FIFO512僶僀僩晅偒偱偡丅僼傽乕儉僂僃傾偼丄1僶僀僩偯偮億乕僩偵彂偒崬傒傑偡偑丄偦偺嵺FIFO偑FULL偐偳偆偐忢偵僠僃僢僋偟側偑傜彂偒崬傓昁梫偑偁傝傑偡丅READ偵偮偄偰偼FIFO偼側偔1僶僀僩枅偵妱傝崬傒偑敪惗偡傞巇條側偺偱丄偦傟傪妱傝崬傒張棟偡傞昁梫偑偁傝傑偡丅
丂傑偨丄UART偺億乕僩儅僢僺儞僌偼丄愱梡偺NON僉儍僢僔儏椞堟偵儅僢僾偟傑偡丅(IO偼僉儍僢僔儏椞堟偵偼儅僢僾偱偒傑偣傫丅..)
WISHBONE僶僗偵撈帺偺IO傪捛壛偡傞応崌偼丄偙偺UART偺億乕僩婰弎傪嶲峫偵偟偰偔偩偝偄丅丂
丂
丂SRAM偲UART傪娷傓僴乕僪僂僃傾TOP偼丄師偺捠傝偱偡丅Wishbone僶僗僐儞僩儘乕儔偵2偮偺儅僗僞偲俀偮偺僗儗乕僽偑偮側偑傝傑偡丅儅僗僞偼丄D-Cache偲I-Cache丄僗儗乕僽偼丄SRAM(32KB)偲IO椞堟乮旕僉儍僢僔儏椞堟偵側傝傑偡丅乯丂IO椞堟偼丄FIFO晅偒UART丂WRITE僽儘僢僋丄偲READ僽儘僢僋偑愙懕偝傟傑偡丅枹偩丄marsee偝傫偺DDR僐儞僩儘乕儔傪愙懕偡傞抜奒偱偼偁傝傑偣傫丅偙偺僴乕僪僂僃傾僽儘僢僋扨懱偱偺摦嶌妋擣傪幚婡偱峴偭偨屻偵丄SRAM僐儞僩儘乕儔専徹億乕僩傪旕僉儍僢僔儏椞堟偵儅僢僾偟傑偡丅
丂
module hardware_top(
input clk,rst,
input RXD,
output TXD
);
wire [31:0] m0_data_i;
wire [31:0] m0_data_o;
wire [31:0] m0_addr_i;
wire [3:0] m0_sel_i;
wire m0_we_i;
wire m0_cyc_i;
wire m0_stb_i;
wire m0_ack_o;
wire m0_err_o;
wire m0_rty_o;
wire [31:0] m1_data_i;
wire [31:0] m1_data_o;
wire [31:0] m1_addr_i;
wire [3:0] m1_sel_i;
wire m1_we_i;
wire m1_cyc_i;
wire m1_stb_i;
wire m1_ack_o;
wire m1_err_o;
wire m1_rty_o;
//Slave ports
wire [31:0] s0_data_i,s1_data_i;
wire [31:0] s0_addr_o,s1_addr_o;
wire [31:0] s0_data_o,s1_data_o;
wire [3:0] s0_sel_o,s1_sel_o;
wire s0_we_o,s1_we_o;
wire s0_cyc_o,s1_cyc_o;
wire s0_stb_o,s1_stb_o;
wire s0_err_i,s1_err_i;
wire s0_rty_i,s1_rty_i;
wire [5:0] interrupt;
wire s0_ack_i,s1_ack_i;
wire uart_read_int;
assign interrupt={4'b0000,uart_read_int};//uart int傪CPU偺interrupt port偵愙懕
/////////////////////////////////////////////////////////////////////
//
// WISHBONE Inter Connect
//
//僶僗僐儞僩儘乕儔
wb_conbus_top #(4,
4'h0,
4,
4'h1,
4,
4'h2,
4'h3,
4'h4,
4'h5,
4'h6,
4'h7
)
conbus(
.clk_i( clk ),
.rst_i( rst ),
.m0_dat_i( m0_data_i ),
.m0_dat_o( m0_data_o ),
.m0_adr_i( m0_addr_i ),
.m0_sel_i( m0_sel_i ),
.m0_we_i( m0_we_i ),
.m0_cyc_i( m0_cyc_i ),
.m0_stb_i( m0_stb_i ),
.m0_ack_o( m0_ack_o ),
.m0_err_o( m0_err_o ),
.m0_rty_o( m0_rty_o ),
.m1_dat_i( m1_data_i ),
.m1_dat_o( m1_data_o ),
.m1_adr_i( m1_addr_i ),
.m1_sel_i( m1_sel_i ),
.m1_we_i( m1_we_i ),
.m1_cyc_i( m1_cyc_i ),
.m1_stb_i( m1_stb_i ),
.m1_ack_o( m1_ack_o ),
.m1_err_o( m1_err_o ),
.m1_rty_o( m1_rty_o ),
//壖憐RAM
.s0_dat_i( s0_data_i ),
.s0_dat_o( s0_data_o ),
.s0_adr_o( s0_addr_o ),
.s0_sel_o( s0_sel_o ),
.s0_we_o( s0_we_o ),
.s0_cyc_o( s0_cyc_o ),
.s0_stb_o( s0_stb_o ),
.s0_ack_i( s0_ack_i ),
.s0_err_i( s0_err_i ),
.s0_rty_i( s0_rty_i ),
//壖憐億乕僩
.s1_dat_i( s1_data_i ),
.s1_dat_o( s1_data_o ),
.s1_adr_o( s1_addr_o ),
.s1_sel_o( s1_sel_o ),
.s1_we_o( s1_we_o ),
.s1_cyc_o( s1_cyc_o ),
.s1_stb_o( s1_stb_o ),
.s1_ack_i( s1_ack_i ),
.s1_err_i( s1_err_i ),
.s1_rty_i( s1_rty_i )
);
/////////////////////////////////////////////////////////////////////
//
// WISHBONE Slave Models
//
//壖憐SRAM儌僕儏乕儖傪愙懕
onchip_ram_top onchip_ram( .wb_clk_i( clk ),
.wb_rst_i( rst ),
.wb_adr_i( s0_addr_o ),
.wb_dat_i( s0_data_o ),
.wb_dat_o( s0_data_i ),
.wb_cyc_i( s0_cyc_o ),
.wb_stb_i( s0_stb_o ),
.wb_sel_i( s0_sel_o ),
.wb_we_i( s0_we_o ),
.wb_ack_o( s0_ack_i ),
.wb_err_o( s0_err_i ),
.wb_rty_o( s0_rty_i )
);
//壖憐IO儌僕儏乕儖傪愙懕
virtual_io_port virtual_io_port( .wb_clk_i( clk ),
.wb_rst_i( rst ),
.wb_adr_i( s1_addr_o ),
.wb_dat_i( s1_data_o ),
.wb_dat_o( s1_data_i ),
.wb_cyc_i( s1_cyc_o ),
.wb_stb_i( s1_stb_o ),
.wb_sel_i( s1_sel_o ),
.wb_we_i( s1_we_o ),
.wb_ack_o( s1_ack_i ),
.wb_err_o( s1_err_i ),
.wb_rty_o( s1_rty_i ),
.TXD(TXD),
.RXD(RXD),
.uart_read_int(uart_read_int)
);
/////////////////////////////////////////////////////////////////////
//
// WISHBONE Master Models
//
//CPU晹乮I僉儍僢僔儏丄D僉儍僢僔儏娷傓乯
wishbone_yacc yacc_as_wb_master(
//common port
.wb_clk_i( clk ),
.wb_rst_i( rst ),
//master port 0 //YACC 僀儞僗僩儔僋僔儑儞僉儍僢僔儏
.wb_m0_addr_o( m0_addr_i ),
.wb_m0_dat_i( m0_data_o ),
.wb_m0_dat_o( m0_data_i ),
.wb_m0_cyc_o( m0_cyc_i ),
.wb_m0_stb_o( m0_stb_i ),
.wb_m0_sel_o( m0_sel_i ),
.wb_m0_we_o( m0_we_i ),
.wb_m0_ack_i( m0_ack_o ),
.wb_m0_err_i( m0_err_o ),
.wb_m0_rty_i( m0_rty_o ),
//master port1 //YACC 僨乕僞僉儍僢僔儏
.wb_m1_addr_o( m1_addr_i ),
.wb_m1_dat_i( m1_data_o ),
.wb_m1_dat_o( m1_data_i ),
.wb_m1_cyc_o( m1_cyc_i ),
.wb_m1_stb_o( m1_stb_i ),
.wb_m1_sel_o( m1_sel_i ),
.wb_m1_we_o( m1_we_i ),
.wb_m1_ack_i( m1_ack_o ),
.wb_m1_err_i( m1_err_o ),
.wb_m1_rty_i( m1_rty_o ),
.interrupt(interrupt)
);
endmodule
UART傪娷傓CPU僽儘僢僋偺専徹
偦傟偱偼丄UART偲SRAM傪娷傓専徹偼偳偆偡傟偽傛偄偱偟傚偆偐丠娙扨側C僾儘僌儔儉傪彂偄偰傒傑偟傚偆丅偄傑傑偱僐儞僜乕儖弌椡偼丄壖憐億乕僩傪巊梡偟偰偒傑偟偨偑丄崱搙偼丄杮暔偺乮HDL偱彂偄偨僴乕僪僂僃傾乯億乕僩乮UART乯傪嬱摦偟傑偡丅丂丂
僀儞僞儔僋僥傿僽側UART偺僔儈儏儗乕僔儑儞偺巇曽
C偱揹戩偺僾儘僌儔儉傪彂偄偰偄傑偡丅偝偰丂UART偱僀儞僞儔僋僥傿僽偵
- 儐乕僓擖椡
- 寁嶼寢壥偺昞帵
傪僔儈儏儗乕僔儑儞偡傞偵偼偳偆偟偨傜傛偄偱偟傚偆偐丠
偦傟偵偼丄HOST丂PC偺UART億乕僩偺僥僗僩儀儞僠偱彂偄偰丄崌惉懳徾偱偁傞UART傪娷傓CPU偲捠怣偝偣傟偽傛偄偱偡偹丅壓偑丄HOSTPC偺UART傪僔儈儏儗乕僔儑儞偡傞僥僗僩儀儞僠偱偡丅
丂UART偼丄CPU撪偱帩偭偰偄傞UART偲摨偠儌僕儏乕儖偱堘偆僀儞僗僞儞僗偵側傝傑偡丅専徹嵪傒偺H/W偼丄僥僗僩儀儞僠偱晹昳偲偟偰棙梡偱偒傑偡丅
丂崌惉懳徾偱偁傞丄CPU偼丄忋偺僽儘僢僋恾偱DDR僐儞僩儘乕儔埲奜偺慡偰偺H/W傪撪曪偟偰偄傑偡丅偟偐偟丄僋儘僢僋偲儕僙僢僩丄偦傟偵UART億乕僩偺RXD,TXD偟偐偁傝傑偣傫丅
CPU偐傜憲傜傟偰偔傞RXD偼丄價僢僩偺梾楍偱偟偐側偄偺偱丄恖娫偑尒傗偡偄傛偆偵HOST丂PC偺UART偱僐儞僜乕儖偵弌椡偟偰傗傝傑偡丅
傑偨丄恖娫偑僀儞僞儔僋僥傿僽偵擖椡偡傞僉乕儃乕僪擖椡偼丄僞僗僋壔偟丄
send_uart_str("1+1\n");
偲偄偆姶偠偵婰弎偟傑偡丅恖娫偑擖椡偡傞偺偼丄YACC>偲偄偆儊僢僙乕僕傪尒偰偐傜擖椡偡傞偺偱丄僞僗僋撪偱偼丄
wait(buffer_reg==">");//僾儘儞僾僩傪懸偮
偺屻偵擖椡偡傞乮UART偱CPU偵憲傞乯偲偄偆嬶崌偱偡丅
`timescale 1ns/1ps
`include "define.h"
module tb_wb_conbus;
reg clk=0;
reg rst=1;
wire TXD, RXD;
initial
begin
rst=1;
#101;
rst = 0;
// HERE IS WHERE THE TEST CASES GO ...
//$finish;
end // End of Initial
/////////////////////////////////////////////////////////////////////
//
// Clock Generation
//
`ifdef DELAY_SIM
always #(18) clk = ~clk;
// initial begin
// $dumpvars(1,tb_wb_conbus.dut);
// #20000;
// $dumpflush;
// $finish;
// end
`else
always #10 clk = ~clk;
`endif
`ifdef ECHO_BACK
assign RXD=TXD;//僄僐乕僶僢僋
`endif
//崌惉懳徾
hardware_top dut( .clk,.rst,.RXD,.TXD );
`define SIMULATE_HOST_UART
`ifdef SIMULATE_HOST_UART
//壖憐UART丂YACC偐傜憲傜傟偰偔傞TXD傪夝庍偟丂僐儞僜乕儖偵弌椡偡傞
//uart read port
wire [7:0] buffer_reg;
wire int_req;
reg sync_reset;
always @(posedge clk, posedge rst) begin
if (rst) sync_reset <=1'b1;
else sync_reset<=1'b0;
end
uart_read uart_read_port( .sync_reset(sync_reset), .clk(clk), .rxd(TXD),.buffer_reg(buffer_reg), .int_req(int_req));
`ifndef ECHO_BACK //儂僗僩偺憲傝懁UART僽儘僢僋
reg [7:0] host_write_byte;
reg uart_write=0;
wire uart_busy;
uart_write uwrite( .sync_reset(sync_reset),
.clk(clk),
.txd(RXD ),
.data_in(host_write_byte) ,
.write_request(uart_write ),
.write_done(),
.write_busy(uart_busy) );
task sleep(input integer count);
repeat(count) begin
@(posedge clk);
end
endtask
initial begin
wait(!sync_reset);
send_uart_str("1+1\n");
send_uart_str("1000+1001\n");
send_uart_str("(-105)/(-31)\n");
send_uart_str("(-105)/(31)\n");
send_uart_str("(1050)/(-31)\n");
send_uart_str("105%31\n");
send_uart_str("-105%31\n");
send_uart_str("(-105)%(-31)\n");
send_uart_str("(-105)%(31)\n");
send_uart_str("(1050)%(-31)\n");
send_uart_str("2147483647/13213210\n");
send_uart_str("(-2147483647)/1654760\n");
send_uart_str("(-2147483647)/(-14320)\n");
send_uart_str("(+2147483647)/(-153420)\n");
send_uart_str("2147483647%14324320\n");
send_uart_str("(-2147483647)%14320\n");
send_uart_str("(-2147483647)%(-1540)\n");
send_uart_str("(+2147483647)%(-143220)\n");
send_uart_str("-17/(1)\n");
send_uart_str("117/(-1)\n");
send_uart_str("-(-13432234)/(-4323437)\n");
send_uart_str("-(-143243243)/(743243)\n");
send_uart_str("-123459*(-3454)\n");
send_uart_str("-1321*(73213)\n");
send_uart_str("+543541*(7213)\n");
send_uart_str("+1432*(-7322)\n");
send_uart_str("-165*(-7232)\n");
send_uart_str("-(1321)*(-7111)\n");
send_uart_str("-(-1543)*(-743243)\n");
sleep(50000);//寢壥昞帵懸偪
$finish;
end
task send_uart_byte(input [7:0] byte);
begin
wait(!uart_busy);
@(negedge clk);
host_write_byte=byte;
uart_write=1;
@(negedge clk);
uart_write=0;
end
endtask
task send_uart_str (input [8*100-1:0] str);
integer counter;
begin
wait(buffer_reg==">");//僾儘儞僾僩傪懸偮
counter=0;
while (str[ 8*counter +:8] !==0) counter=counter+1;//暥帤悢傪悢偊傞
if (counter) counter=counter-1;//1埲忋偁傞側傜-1偵偟偰嵟屻偺暥帤傪巜偝偣傞
while(counter>=0) begin//屻傠偐傜憲傞
send_uart_byte(str[8*counter +:8]);
counter=counter-1;
end
wait(buffer_reg !=">");//儗僗億儞僗傪懸偮
end
endtask
`endif
integer i=0;
always @(posedge int_req) begin
begin :local
localparam LF=8'h0a;
reg [7:0] local_mem [0:1000];
if (i>=1000) begin
$display("Too many Characters.");
$stop;//assert(0);
end
if (buffer_reg==LF) begin :local2 //pop stack
integer j;
j=0;
while( j < i) begin
$write( "%c",local_mem[j]);
j=j+1;
end
if (local_mem[1]=="$" &&
local_mem[2]=="f" &&
local_mem[3]=="i" &&
local_mem[4]=="n" &&
local_mem[5]=="i" &&
local_mem[6]=="s") $finish;
else if (local_mem[1]=="$" &&
local_mem[2]=="t" &&
local_mem[3]=="i" &&
local_mem[4]=="m" &&
local_mem[5]=="e") $display(" time=%t",$time);
// $write(" : time=%t\n",$time);
i=0;//clear stack
end else begin//push stack
local_mem[i]=buffer_reg;
i=i+1;
end
end
end
`endif
endmodule
偙傟傪僔儈儏儗乕僔儑儞偟偨條巕偱偡丅
YACC>丂偑丂CPU偑弌椡偟偨僾儘儞僾僩丂偱丂1+1偑恖娫偺擖椡傪柾媅偟偰HOSTPC丂UART偐傜憲偭偨傕偺偱偡偑丄昞帵偺1+1偼CPU偑僄僐乕僶僢僋偟偨寢壥偱偡丅
偙偺傛偆偵丄僥僗僩儀儞僠傪彂偔偙偲偵傛偭偰丄HDL僔儈儏儗乕僞忋偱偐側傝偺晹暘傪僔儈儏儗乕僩壜擻偱偡丅乮婥崌偺偁傞曽偼丄VPI傪巊偭偰幚嵺偵GUI偱僉乕儃乕僩偐傜擖椡偟偰傕柺敀偄偐傕偟傟傑偣傫丅乯C僐儞僷僀儖偐傜奐巒偐傜丄HDL偺僐儞僷僀儖姰椆傑偱3昩埵偱偡丅僔儈儏儗乕僔儑儞慡懱偺RUN帪娫偼丄Celeron1.2GHz偱7暘埵偱偟偨偑丄嵟弶偺儊僢僙乕僕傑偱偼丄悢昩偱丄夣揔側奐敪娐嫬偩偲巚偄傑偡丅僔儈儏儗乕僔儑儞偑懍偄偺偼丄CPU偺僜乕僗偑RTL偱偁傞偙偲偵婲場偟傑偡丅FPGA儀儞僟偺CPU傕儀儞僟僾儕儈僥傿僽偱偼側偔丄RTL偱弌偟偰偔傟傟偽丄懍偔側傞偺偱偡偑..乯
奒憌僗僐乕僾傪壓偵弌偟偰偄傑偡偑丄dut埲壓偑崌惉懳徾偵側傝傑偡丅
| tb_wb_conbus | 僥僗僩儀儞僠TOP |
| dut | 崌惉奒憌TOP |
| conbus | Wishbone僶僗僐儞僩儘乕儔 |
| onchip_ram | 8Kwordsx4 =32KSRAM |
| virtual IO port | UART |
| yacc_as_wb_master | 僉儍僢僔儏晅偒YACC |
偲偙傠偱丄RDX偼丄1僶僀僩偯偮偺妱傝崬傒偵側傝傑偡丅廬偭偰妱傝崬傒張棟僾儘僌儔儉傕彂偐側偔偰偼偄偗傑偣傫丅
億乕僩掕媊偼丄偑yacc_port.h偑C僿僢僟, define.h丂偑HDL忋偺億乕僩掕媊偵側傝傑偡丅
//YACC Definitions
#define UART_PORT_ADDRESS 0x1ffffc //
億乕僩偺價僢僩掕媊偼埲壓偱偡丅W/R傾僪儗僗偼嫟捠偱Bit[8]偑FIFO丂FULL偱偁傞偙偲傪帵偟偰偄傑偡丅
| 傾僪儗僗 | R | W |
| UART_PORT_ADDRESS | Read Data:[7:0] WriteBusy [8] 1偱FIFO丂FULL丄0偱Write丂Ready [31:9] :Reserved |
WriteData:[7:0] |
C偱偺UART丂R/W丂儖乕僠儞偱偡丅
void print_uart(unsigned char* ptr)//
{
unsigned int uport;
#define WRITE_BUSY 0x0100
while (*ptr) {
do {
uport=*(volatile unsigned*) uart_port;
} while (uport & WRITE_BUSY);
*(volatile unsigned char*)uart_wport=*(ptr++);
}
//*(volatile unsigned char*)uart_wport=0x00;//Write Done
}
void putc_uart(unsigned char c)//
{
unsigned int uport;
do {
uport=*(volatile unsigned*) uart_port;
} while (uport & WRITE_BUSY);
*(volatile unsigned char*)uart_wport=c;
}
char read_uart()//Verilog Test Bench Use
{
unsigned uport;
uport= *(volatile unsigned *)uart_rport;
return uport;
}
妱傝崬傒僴儞僪儔偼丄埲壓偺傾僙儞僽儔偺僜乕僗偵側傝傑偡偑丄儐乕僓偼丄側傫傜儊儞僥偡傞昁梫偑偁傝傑偣傫丅師偺僗僞乕僩傾僢僾僼傽僀儖偲儕儞僋偡傞偩偗偱偡丅乮忔彍嶼僙乕僽傪捛壛偟傑偟偨丅乯
##################################################################
# TITLE: Boot Up Code
# AUTHOR: Steve Rhoads (rhoadss@yahoo.com)
# DATE CREATED: 1/12/02
# FILENAME: boot.asm
# PROJECT: Plasma CPU core
# COPYRIGHT: Software placed into the public domain by the author.
# Software 'as is' without warranty. Author liable for nothing.
# DESCRIPTION:
# Initializes the stack pointer and jumps to main2().
##################################################################
.text
.align 2
.globl entry
.ent entry
entry:
.set noreorder
#These eight instructions must be the first instructions.
#convert.exe will correctly initialize $gp
lui $gp,0
ori $gp,$gp,0
#convert.exe will set $4=.sbss_start $5=.bss_end
lui $4,0
ori $4,$4,0
lui $5,0
ori $5,$5,0
lui $sp,0
ori $sp,$sp,0xfff0 #initialize stack pointer
$BSS_CLEAR:
sw $0,0($4)
slt $3,$4,$5
bnez $3,$BSS_CLEAR
addiu $4,$4,4
sw $5,bss_end_save
lui $4,0
ori $4,0xff01 #尰忬懺丂僇乕僱儖儌乕僪丄妱傝崬傒Enable/妱傝崬傒Enable價僢僩SET
mtc0 $4,$12 #妱傝崬傒Enable
jal main2 # C 儊僀儞偵旘傇
nop
$L1:
j $L1
.align 4
.globl bss_end_save
bss_end_save:
.long 0
.org 0x80
#.set noreorder
#address 0x3c
interrupt_service_routine:#僀儞僞儔僾僩僴儞僪儔
addi $sp, $sp, -25*4
sw $1, 1*4($sp)
sw $2, 2*4($sp)
sw $3, 3*4($sp)
sw $4, 4*4($sp)
sw $5, 5*4($sp)
sw $6, 6*4($sp)
sw $7, 7*4($sp)
sw $8, 8*4($sp)
sw $9, 9*4($sp)
sw $10, 10*4($sp)
sw $11, 11*4($sp)
sw $12, 12*4($sp)
sw $13, 13*4($sp)
sw $14, 14*4($sp)
sw $15, 15*4($sp)
sw $24, 16*4($sp)
sw $25, 17*4($sp)
sw $28, 18*4($sp)
sw $30, 19*4($sp)
sw $31, 20*4($sp)
mfhi $3 #Mar.8.2008 忔彍嶼儗僕僗僞 HI 偺懸旔
mflo $4 #Mar.8.2008 忔彍嶼儗僕僗僞 LO 偺懸旔
sw $3, 21*4($sp) #Mar.8.2008 HI
sw $4, 22*4($sp) #Mar.8.2008 LO
#偙偙偱丂C丂妱傝崬傒儖乕僠儞傪屇傇
jal interrupt # C 儊僀儞偵旘傇
lw $3, 21*4($sp) #Mar.8.2008
lw $4, 22*4($sp) #Mar.8.2008
mthi $3 #Mar.8.2008 忔彍嶼儗僕僗僞 HI 偺暅尦
mtlo $4 #Mar.8.2008 忔彍嶼儗僕僗僞 LO 偺暅尦
lw $1, 1*4($sp)
lw $2, 2*4($sp)
lw $3, 3*4($sp)
lw $4, 4*4($sp)
lw $5, 5*4($sp)
lw $6, 6*4($sp)
lw $7, 7*4($sp)
lw $8, 8*4($sp)
lw $9, 9*4($sp)
lw $10, 10*4($sp)
lw $11, 11*4($sp)
lw $12, 12*4($sp)
lw $13, 13*4($sp)
lw $14, 14*4($sp)
lw $15, 15*4($sp)
lw $24, 16*4($sp)
lw $25, 17*4($sp)
lw $28, 18*4($sp)
lw $30, 19*4($sp)
lw $31, 20*4($sp)
addi $sp, $sp, 25*4
mfc0 $27,$14 # EPC=14 栠傝斣抧偑婰榐偟偰偁傞EPC傪$27偵撉傓
jr $27 # 妱傝崬傒暅婣
rfe # 妱傝崬傒Enable丄儐乕僓儌乕僪暅婣
nop
.set reorder
.end entry
C偱interrupt() 偲偄偆柤慜偺娭悢傪掕媊偡傞偲丄偦偙偵妱傝崬傒帪旘傫偱偒傑偡偺偱丄偦偙偵儐乕僓張棟傪彂偒傑偡丅枹偩儌僯僞傪彂偄偰偄側偄偺偱偡偑丄椺偊偽丄師偺傛偆側姶偠偱偡丅
void interrupt()
{
int c;
c=read_uart();//UART傪撉傒崬傫偱
cbuf[counter]=c;//僶僢僼傽偵僙乕僽
}
偲偙傠偱丄UART偺儃乕儗乕僩偼丄懍偔偰傕115.2kbps側偺偱丄偙傟偵懌傪堷偭挘傜傟偰僔儈儏儗乕僔儑儞偵帪娫偑偐偐偭偰偟傑偄傑偡丅偦偙偱丄RTL僔儈儏儗乕僔儑儞帪偼丄define.h偱埲壓偺傛偆偵僇僂儞僩悢傪乮傛偔尵偆偲乯傾僋僙儔儗乕僩偟偰偄傑偡丅壖憐悢Mbps偺UART偵側傝傑偡丅丂榑棟崌惉帪偼丄尰幚偺悽奅偵栠偝側偄偲偄偗傑偣傫丅
偙偺傛偆偵僿僢僟僼傽僀儖偱掕媊偟偰偍偄偰憲怣儌僕儏乕儖庴怣儌僕儏乕儖嫟摨偠僿僢僟僼傽僀儖傪嶲徠偡傞傛偆偵偡傟偽define掕媊偺On/Off偩偗偱偮偠偮傑傪崌傢偣傜傟傑偡丅
`ifdef RTL_SIMULATION
`define FAST_SIM
`endif
`ifdef FAST_SIM
`define COUNTER_VALUE1 (18) // TEMP 216)
`else
`define COUNTER_VALUE1 (216) // TEMP 216)
`endif
偝偰丄埲忋偺弨旛傪宱偰傛偆傗偔丄儊僀儞偺C僥僗僩僾儘僌儔儉乮揹戩僾儘僌儔儉乯偱偡丅崱夞偼丄newlib傕惍旛偟偰偁傞偺偱彮偟偄偠傟偽晜摦彫悢傕巊梡壜擻偱偡丅
#include "yacc_port.h"
#define BUF_SIZE 1000
unsigned char buffer[BUF_SIZE];
unsigned char * read_ptr=buffer;
char result_buffer[16];//8+1
unsigned char sym;
unsigned char* char_ptr;
long term(void);
long factor(void);
long expression(void);
void calculator();
int volatile int_flag=0;//volatile 偼昁恵丅側偄偲calculator偵峴偐側偄
char buf[2];
#undef print_char
void print_uart(unsigned char* ptr)//
{
unsigned int uport;
#define WRITE_BUSY 0x0100
while (*ptr) {
do {
uport=*(volatile unsigned*) uart_port;
} while (uport & WRITE_BUSY);
*(volatile unsigned char*)uart_wport=*(ptr++);
}
//*(volatile unsigned char*)uart_wport=0x00;//Write Done
}
void putc_uart(unsigned char c)//
{
unsigned int uport;
do {
uport=*(volatile unsigned*) uart_port;
} while (uport & WRITE_BUSY);
*(volatile unsigned char*)uart_wport=c;
}
char read_uart()//Verilog Test Bench Use
{
unsigned uport;
uport= *(volatile unsigned *)uart_rport;
return uport;
}
void pp(unsigned char* ptr)//Verilog Test Bench Use
{
while (*ptr) {
*(volatile unsigned char*)print_port=*(ptr++);
}
*(volatile unsigned char*)print_port=0x00;//Write Done
}
void print(unsigned char* ptr)//Verilog Test Bench Use
{
// pp(ptr);
print_uart(ptr);
}
void print_char(unsigned char c)
{
// pp(&c);
print_uart( &c);
}
void getsym()
{
while ( *char_ptr==' ' ||
*char_ptr=='\n' ||
*char_ptr=='\r' ) char_ptr++;
if (*char_ptr ==0) {
sym=0;
}else {
sym=*(char_ptr++);
}
}
inline void init_parser()
{
char_ptr=buffer;
getsym();
}
long evaluate_number(void)
{
long x ;
x=sym-'0';
while(*char_ptr >='0' && *char_ptr <='9') {
x = x * 10 + *char_ptr - '0';
char_ptr++;
}
getsym();
return x;
}
long expression(void)
{
long term1,term2;
unsigned char op;
op=sym;
if (sym=='+' || sym=='-') getsym();
term1=term();
if (op=='-') term1=-term1;
while (sym=='+' || sym=='-') {
op=sym;
getsym();
term2=term();
if (op=='+') term1= term1+term2;
else term1= term1-term2;
}
return term1;
}
long term(void)
{
unsigned char op;
long factor1,factor2;
factor1=factor();
while ( sym=='*' || sym=='/' || sym=='%'){
op=sym;
getsym();
factor2=factor();
switch (op) {
case '*': factor1= factor1*factor2;
break;
case '/': factor1= factor1/factor2;
break;
case '%': factor1= factor1%factor2;
break;
}
}
return factor1;
}
inline long parse_error()
{
print_uart("\n parse error occurred\n");
return 0;
}
long factor(void)
{
int i;
if (sym>='0' && sym <='9') return evaluate_number();
else if (sym=='('){
getsym();
i= expression();
if (sym !=')'){
parse_error();
}
getsym();
return i;
}else if (sym==0) return 0;
else return parse_error();
}
/* 暥帤楍偺暲傃傪媡弴偵偡傞 */
char *strrev(char *s) {
char *ret = s;
char *t = s;
char c;
while( *t != '\0' )t++;
t--;
while(t > s) {
c = *s;
*s = *t;
*t = c;
s++;
t--;
}
return ret; /* 暲傋懼偊偨暥帤楍偺愭摢傊偺億僀儞僞傪曉偡 */
}
/* 惍悢傪暥帤楍偵曄姺偡傞 */
void itoa(int val, char *s) {
char *t;
int mod;
if(val < 0) {
*s++ = '-';
val = -val;
}
t = s;
while(val) {
mod = val % 10;
*t++ = (char)mod + '0';
val /= 10;
}
if(s == t)
*t++ = '0';
*t = '\0';
strrev(s);
}
void strcpy(char* dest,char* source)
{
char* dest_ptr;
dest_ptr=dest;
while(*source) {
*(dest++) =*(source++);
} ;
*dest=0;//Write Done
}
void calculator()
{
long result;
//僷乕僒弶婜壔
init_parser();
//寁嶼
result=expression();
itoa(result,result_buffer);
//寢壥昞帵
print_uart(buffer);
putc_uart('=');
print_uart(result_buffer);
putc_uart(0x0a);
putc_uart(0x0a);
putc_uart(0x0d);
}
void main()
{
//僆乕僾僯儞僌儊僢僙乕僕昞帵
putc_uart(0x0a);
putc_uart(0x0d);
print_uart("Welcome to YACC World.Jul.15.2004 www.sugawara-systems.com");
putc_uart(0x0a);
putc_uart(0x0d);
print_uart("YACC>\n");
//柍尷儖乕僾
while(1) {
if (int_flag){//擖椡廔椆側傜
int_flag=0;
calculator();//寁嶼偝偣偰
print_uart("YACC>");//僾儘儞僾僩傪昞帵
}
}
}
void interrupt()
{
int c;
c=read_uart();//uart read port 偐傜1僶僀僩撉傒崬傒
if ( c == 0x0a || c==0x0d )
{
*read_ptr = 0;//string 廔抂
read_ptr=buffer;//read_ptr 弶婜壔
putc_uart(0x0a);
putc_uart(0x0d);
if (int_flag) pp("PError!\n");
else int_flag=1;
} else if ( c == '\b' && read_ptr > buffer ){//僶僢僋僗儁乕僗張棟
putc_uart('\b');
read_ptr--;
}else if ( read_ptr>= buffer+BUF_SIZE){// overflow
*read_ptr = 0;//string 廔抂
read_ptr=buffer;//read_ptr 弶婜壔
print_uart("Sorry Overflow..!\n");
}else {//億僀儞僞僀儞僋儕儊儞僩
putc_uart(c);//僄僐乕僶僢僋
*(read_ptr++) = c;
}
}
FirstTry榑棟崌惉寢壥
丂榑棟崌惉偲攝抲攝慄偵ISE偱栺1帪娫偐偐傝傑偟偨丅嬱摦壜擻廃攇悢偼丄30MHz庛偱偡丅儘僕僢僋偺巊梡棪偼70%埵偱偡偑丄RAM偼丄100%巊偄愗偭偰偟傑偄傑偟偨丅丂偙傟偩偲娞怱偺DDR僐儞僩儘乕儔IP偑嵹傜側偔側偭偰偟傑偄傑偡偹丅丂SRAM偼丄側傞傋偔側傜32KB偵偟偨偄偺偱丄UART偺FIFO偲僉儍僢僔儏傪働僠傞偟偐側偝偦偆偱偡丅
億僗僩儗僀傾僂僩僔儈儏儗乕僔儑儞
丂儗僂傾僂僩屻偺攝慄抶墑忣曬傪僶僢僋傾僲僥乕僩偟傑偡丅僱僢僩儕僗僩偼20枩峴,10MB偺僼傽僀儖偱丄僐儞僷僀儖/僔儈儏儗乕僔儑儞偼丄RTL偺悢廫攞偺帪娫偑偐偐傝傑偡丅僨僶僢僌偼壓棳偵側傟偽側傞傎偳丄崲擄偵側傞偺偱丄榑棟揑側僶僌偼丄RTL偺抜奒偱偮傇偟偰偍偒偨偄偱偡偹丅
40ns(25MHz)偱嬱摦偟偰傒傑偟偨丅栤戣側偄傛偆偱偡丅

幚巇條偵崌傢偣傞
丂崱傑偱偼丄僔儈儏儗乕僔儑儞偱峴偄傑偟偨偑丄幚嵺偺FPGA偵慻傒崬傓偵偼丄崌惉忣曬偐傜僼傿乕僪僶僢僋偡傞昁梫偑偁傝傑偡丅
丂侾丏嬱摦廃攇悢
丂丂丂嬱摦壜擻側廃攇悢偼丄30MHz庛偲偄偆儗億乕僩偱偟偨丅僗僞乕僞僉僢僩忋偼丄50MHz偺OSC偑嵹偭偰偄偨偺偱丄暘廃偡傞偐DCM傪巊偭偰25MHz偵偟傑偡丅
丂俀丏幚掕悢
丂丂丂UART偼丄僔儈儏儗乕僔儑儞梡偺掕悢偵側偭偰偄傑偟偨丅侾丏偱寛傑偭偨嬱摦廃攇悢偵崌傢偣偰儃乕儗乕僩偑115.2Kbps偺惍悢攞偵側傞傛偆偵僇僂儞僞掕悢傪崌傢偣傑偡丅
丂俁丏RAM偺尒捈偟
丂丂丂RAM偺梋桾偑慡偔側偄偙偲偑暘偐偭偨偺偱丄僉儍僢僔儏僒僀僘傪尒捈偟傑偡乮僔儈儏儗乕僔儑儞偱偼丄I/D嫟侾KB乯丅
丂係丏惂栺僼傽僀儖
丂丂丂崱傑偱偼丄儖乕僞擟偣偺僺儞攝抲偱偟偨偑丄僗僞乕僞僉僢僩忋偺僺儞攝抲偵偡傞昁梫偑偁傝傑偡丅
摦偐偟偰傒傞
丂丂偲傝偁偊偢丄DCM偼巊傢偢偵1/2暘廃偱摦偐偟偰傒傑偟偨丅儃乕儗乕僩偼丄57.6kbps丄僉儍僢僔儏偼丄I/D嫟512B丄SRAM偼32KB偵偟偰偄傑偡丅惂栺僼傽僀儖偼丄僺儞攝抲偺傒偱偡丅
丂師偼丄HDL僜乕僗偺Define.h丂偱丄RTL_Simulation傪僐儊儞僩傾僂僩偟偰崌惉梡偵偟偰偄傑偡丅
//`define RTL_SIMULATION //comment out for synthesis
`define NEW_YACC
//`define USE_VIRTUAL_PRINT_PORT
//Virtual Port for Debug Use
`define Print_Port_Address 32'h1f_fff0 //
`define Print_CAHR_Port_Address 32'h1f_fff1
`define Print_INT_Port_Address 32'h1f_fff2 //First ADDRESS
`define Print_LONG_Port_Address 32'h1f_fff4 //First ADDRESS
`define Print_putchar_port_address 32'h1f_ffe0 //char port address
`define FILE_NAME_READ_PORT_ADDRESS 32'h1f_ffc0 // I: FILE_NAME
`define FILE_NAME_WRITE_PORT_ADDRESS 32'h1f_ffc4 // I: FILE_NAME
`define FILE_IO_PORTS 32'h1f_ffc8 // 6 ports
`define FILE_IO_START 32'h1f_ffc0
`define MAX_FILE_DESCRIPTOR 7
`define MIN_FILE_DESCRIPTOR 2
`define NUM_OF_FILE_DESCRIPTORS (`MAX_FILE_DESCRIPTOR-`MIN_FILE_DESCRIPTOR+1)
`define UART_PORT_ADDRESS 32'h1f_fffc //Reserved
`define INTERUPPT_ADDRESS 32'h1f_fff8 //Reserved
`define EOF (-1)
//UART_PORT
// { 23'b Reserved, WRite_BUSY, read_data/write_data} ;// dpends on R/W
`ifdef RTL_SIMULATION
`define FAST_SIM
`endif
`ifdef FAST_SIM
`define COUNTER_VALUE1 (22) // TEMP 216)
`else
`define COUNTER_VALUE1 (216) // TEMP 216)
`endif
`define COUNTER_VALUE2 (`COUNTER_VALUE1*2+1)
`define COUNTER_VALUE3 (`COUNTER_VALUE1+3)
//Compile Options
`define IO_SPACE 16'h001f //001f_xxxx 64KB space None-Decached Domain
`define Reset_Vector 0 //Reset Vector
`define RESET_ADDRSS `Reset_Vector
`define UTLB_Exception 32'h0000_0080 //Reserved
`define General_Exception 32'h0000_0080 //Interrupt Vector
`define ID_CACHE_SIZE (16) //512->16KBytes for each Icache/Dcache Min.=8,16,32....limitted by Vavlue of IO_SPACE
//512 -16KB
//258 -8KB
//128 -4KB
//64-2KB
//32-1KB
//16-512Byte
丂寢壥丄僽儘僢僋RAM偵梋桾偑偱偒傑偟偨丅
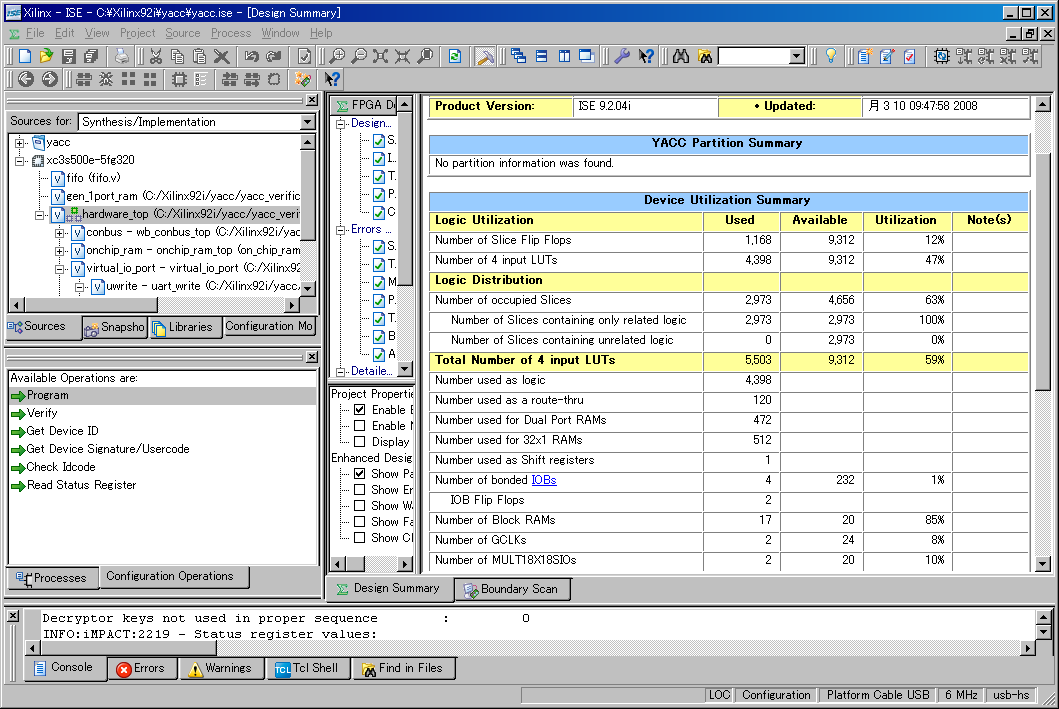
僞乕儈僫儖僜僼僩傪婲摦偝偣偰僔儕傾儖億乕僩傪57.6kbps偱愙懕偟傑偡丅Spartan俁E僉僢僩偺East儃僞儞傪墴偟偰偲儕僙僢僩偝偣丄Welcom..偑偱傟偽惉岟偱偡丅
揔摉偵幃傪擖椡偟偰CR偡傞偲丄
丂擖椡偟偨幃亖摎偊
傪曉偟傑偡丅僾儘儞僾僩傪弌偟儐乕僓擖椡懸偪偵側傝傑偡丅
丂
丂H/W僜乕僗偼UART偺module巇條偵崌傢偣偰丄妱傝崬傒擖椡傪僄僢僕僙儞僗偵偟偨懠偼丄慜夞僜乕僗偐傜曄峏偁傝傑偣傫丅
丂乮梀傫偱尒偨偄曽梡偺bit 僼傽僀儖偱偡丅乯
丂
DDR僐儞僩儘乕儔僥僗僩梡偺儌僯僞偼丄偙偺揹戩僜乕僗傪夵憿偟偰嶌惉偟偨偄偲巚偄傑偡丅僀儊乕僕揑偵偼丄
丂
丂YACC>W丂倶倶丂// 儔僀僩僐儅儞僪丂亄丂僷儔儊乕僞
丂 丂寢壥昞帵丂丂丂.
丂YACC>D丂倶倶倶丂丂//僟儞僾僐儅儞僪丂亄僷儔儊乕僞
丂丂丂寢壥昞帵
丂..
偺傛偆側姶偠偱偡丅
丂僉儍僢僔儏晅偒怴斉YACC偑摦偄偨偺偱丄IP僐傾昡壙偵栠傝傑偟傚偆丅
DDR丂IP偺僞僀儈儞僌昡壙
丂RTL偺昡壙偑丄廫暘偱偼側偄偺偱偡偑丄扨昳偱崌惉丄儗僀傾僂僩屻偺僔儈儏儗乕僔儑儞傪峴偄傑偟偨丅(IP撪偺H/W婰弎偼彮偟偩偗曄峏偟偰偄傑偡丅) 僥僗僩儀儞僠偼丄慜宖偺儀儞僠傪偦偺傑傑巊梡偟傑偟偨丅
亙僐儔儉亜
偄傢備傞乭HDL偵傛傞僩僢僾僟僂儞愝寁乭偲偼丄偙偺帠傪巜偟偰偄傑偡丅RTL偼丄慻傒崌傢偣夞楬偺抶墑傪0偵偟偨儌僨儕儞僌偱偡丅偦傟傪榑棟崌惉偱丄僎乕僩儗儀儖偺僆僽僕僃僋僩偵抲偒姺偊傑偟偨丅偙偺偲偒僥僗僩儀儞僠偼丄RTL偱巊梡偟偨傕偺傪偦偺傑傑巊偆偙偲偵拝栚偟偰偔偩偝偄丅愝寁偺條巕偼丄偙偺挿偄儂乕儉儁乕僕傪尒傞偲儃僩儉傾僢僾偱峴偭偰偄傞偙偲偑暘偐傞偲巚偄傑偡丅偟偐偟丄RTL->僎乕僩傊偺抲偒姺偊偼丄惓偵僩僢僾僟僂儞偱偡丅RTL僔儈儏儗乕僔儑儞偱偼丄婘忋偱壗夞丄斲丄壗昐夞偲側偔丄僔儈儏儗乕僔儑儞傪峴偭偰榑棟揑側僶僌傪廋惓偟側偑傜恑傒傑偟偨丅偛彸抦偺傛偆偵丄偙偺僗僥乕僕偱偼丄婰弎偵傛偭偰偼丄愝寁幰偺堄恾偲堎側傞夞楬偑崌惉偝傟偰偟傑偆婋尟偑偁傝傑偡丅偦傟偵傕峉傢傜偢丄側偤僎乕僩偱側偔偰RTL側偺偐偼丄傕偆偍暘偐傝偱偡偹丅扨弮偵丄僔儈儏儗乕僔儑儞偑懍偄偐傜偱偡丅
RTL娐嫬側傜C偺僜乕僗僐儞僷僀儖偐傜HDL僐儞僷僀儖丄僔儈儏儗乕僔儑儞奐巒傑偱悢昩偱偡偑丄幚婡偱偼丄偙偺掱搙偺婯柾偱丄1帪娫埵偐偐偭偰偟傑偄傑偡丅
偝偰丄寢壥丄IFD_DELAY_VALUE偼丄1偐傜4傑偱摦嶌偡傞偙偲偑暘偐傝傑偟偨丅愝寁幰偺巜掕偼丄2偱偟偨偐傜丄傎傏慱偄栚捠傝偵側偭偰偄傞偲尵偭偰傛偄偱偟傚偆丅
丂埲壓偱偼丄IFD_DelayValue偼丄0偱丄DDR_CLK偺埵憡傪彮偟偩偗偄偠偭偰摦偐偟偰偄傑偡丅側偍丄IFD_DelayValue傪巜掕偡傞偲丄摨偠UCF巜掕偱傕奒憌偺嬶崌偱丄Delay偺擖傝曽偑戝暆偵堘偆偙偲偑偁傞傛偆側偺偱拲堄偟傑偡乯
昡壙梡億乕僩偺嶌惉
丂丂YACC偼RTL/抶墑僔儈儏儗乕僔儑儞/幚婡丄IP偼RTL/抶墑僔儈儏儗乕僔儑儞偱摦偄偨偺偱丄師偺嶌嬈偼椉幰傪僪僢僉儞僌偝偣傞偙偲偱偡丅昡壙梡偺僜僼僩帺恎傪DDR偵嵹偣傞偲丄摦偐側偄応崌偵栿偑暘偐傜側偄偙偲偵側傞偺偱丄偙偙偼丄暘棧偟偰怲廳偵堦曕偯偮恑傒傑偡丅CPU偐傜W/R偱偒傞IO億乕僩傪旕僉儍僢僔儏椞堟偵嶌傝偦偙偱丄幚婡偱偺昡壙傪峴偆偙偲偵偟傑偡丅
丂丂丂CPU偼丄25MHz丄DDR丂IP偼丄100MHz偱摦偔偺偱僋儘僢僋偺忔傝姺偊偑昁梫偱偡丅偙偙偱拲堄偡傞傋偒偼丄摨偠埵憡偱惗惉偟偨偲偟偰傕丄僗僉儏乕偼丄曐徹偝傟側偄偙偲偱偡丅偙偙偱偺儈僗偼丄RTL僔儈儏儗乕僔儑儞偱偼敪尒偝傟側偄偺偱拲堄傪梫偟傑偡丅乮堦斒偵旕摨婜売強偺愙懕偼丄僔儈儏儗乕僞傗LINT僣乕儖偼棟夝偟偰偄傑偣傫偟丄ASIC偑忋偑偭偒偰偺懡偔偺僩儔僽儖偼偙偺曈偵偁傝傑偡丅乯偙偙偱偼丄扨弮偵埵憡傪偢傜偡曽幃偵偟傑偟偨丅偮傑傝25MHz偼丄100MH偺媡埵憡傪巊梡偟傑偡丅丂埵憡偑偢傟偨摨婜偱偁傟偽丄儊僞僗僥乕僽儖偺怱攝偑側偔丄旕摨婜抶墑偩偗僠僃僢僋偡傟偽傛偄偺偱娙扨偱偡丅丂傑偨丄抜娫偼丄FF偱庴偗傞巇條偲偟傑偟偨丅儗僕僗僞巇條偼丄埲壓偱偡丅YACC偺傾僋僙僗偼丄儔僀僩僶僢僋僉儍僢僔儏曽幃偱偁傝4儚乕僪僶乕僗僩傾僋僙僗偺傒偟偐側偄偺偱偡偑丄偙偙偱偼嵟戝8儚乕僪偲偟傑偟偨丅傑偨丄DMA偼搵嵹梊掕偑偁傝傑偣傫丅挿偄僶乕僗僩偵偮偄偰偼丄幚婡昡壙傪峴偄傑偣傫丅
| 柤徧 | W/R | 價僢僩 | 價僢僩僼傿乕儖僪柤 | 撪梕 |
| DDR RW Address | W/R | [31:0] | ddr_address | DDR傪R/W偡傞傾僪儗僗傪愝掕 |
| DDR_Control | W | [0:0] | R_W_direction | R/W 傪巜掕丂Write偼1丄Read偼丄0傪巜掕偡傞丅杮儚乕僪偺彂偒崬傒偱僐儅儞僪僗僞乕僩巜帵偵側傞 |
| R | [0:0] | Busy | Command Processing: 侾偺偲偒僐儅儞僪幚峴拞乮Busy)丅1偑棫偭偰偄傞偲偒丄偙偺僌儖乕僾偺儗僕僗僞偼彂崬傒嬛巭丄Reset捈屻偼丄Busy | |
| W | [4:1] | N_of_words | NoOfWords : 嵟戝8儚乕僪乮1儚乕僪偼丄4僶僀僩乯傑偱偺僶乕僗僩W/R悢傪巜掕, 儕乕僪帪偼丄晄掕 | |
| - | [31:5] | Reserved | ||
| DDR_Data0 | W/R | [31:0] | dreg[0] | R/W偝傟傞嵟弶偺儚乕僪 |
| DDR_Data1 | W/R | [31:0] | dreg[1] | |
| DDR_Data2 | W/R | [31:0] | dreg[2] | |
| DDR_Data3 | W/R | [31:0] | dreg[3] | |
| DDR_Data4 | W/R | [31:0] | dreg[4] | |
| DDR_Data5 | W/R | [31:0] | dreg[5] | |
| DDR_Data6 | W/R | [31:0] | dreg[6] | |
| DDR_Data7 | W/R | [31:0] | dreg[7] |
CPU偼丄忋婰億乕僩巇條偱僐儅儞僪傪彂偒崬傒丄寢壥傪懸偪丄僐儞儁傾僠僃僢僋摍傪峴偄傑偡丅
埲壓丄僐儅儞僪巇條偱偡丅
| 僐儅儞僪 | 撪梕 | 僐儅儞僪彂幃 | 僐儅儞僪椺 |
| 僟儞僾 | 巜掕DDR傾僪儗僗偺DDR儊儌儕傪僟儞僾昞帵偡傞 | D 傾僪儗僗[HEX] 8儚乕僪傪扨埵偲偟偨扨埵悢(HEX) | D 0 10 |
| 僔儞僌儖儚乕僪儔僀僩 | 巜掕DDR傾僪儗僗偵巜掕抣傪DDR偵侾儚乕僪彂偔丅彂偄偨屻偵撉傒丄Verified亖偱昞帵偝傟傞丅乮係BYTE丂BOUNDARY ONLY) | W丂傾僪儗僗[HEX]丂僨乕僞[HEX] | W 0 DEADBEAF |
| 僔儞僌儖儚乕僪儕乕僪 | 巜掕DDR傾僪儗僗偺僨乕僞傪撉傓丂乮係BYTE丂BOOUNDARY ONLY) | R丂傾僪儗僗[HEX] | R 0 |
| 儗僕僗僞儔僀僩 | 巜掕傾僪儗僗偺IO億乕僩傪儔僀僩偡傞 | S丂傾僪儗僗[HEX]丂僨乕僞[HEX] | S 1FFB4 11 |
| 儗僕僗僞儕乕僪 | 巜掕傾僪儗僗偐IO億乕僩傪儕乕僪偡傞 | ?丂傾僪儗僗[HEX] | ? 1FFFB4 |
| 僀儞僋儕儊儞僞儖儔僀僩 | 僀儞僋儕儊儞僞儖丂儔僀僩丂僨乕僞偲偟偰傾僪儗僗抣傪彂偔 | I 丂傾僪儗僗丂8儚乕僪傪扨埵偲偟偨扨埵悢(HEX) | I丂0 100 |
| 僀儞僋儕儊儞僞儖儕乕僪僐儞儁傾 | 僀儞僋儕儊儞僞儖丂儕乕僪丂傾僪儗僗抣偲僐儞儁傾傪峴偆 | C丂傾僪儗僗丂8儚乕僪傪扨埵偲偟偨扨埵悢(HEX) | C 0 100 |
丂僪僢僉儞僌屻偺RTL僔儈儏儗乕僔儑儞偱偡丅廳偨偄DCM偑3屄傕擖偭偰偄傞偺偱RTL偵傕偐偐傢傜偢偲偰傕抶偄偱偡丅
抶墑僔儈儏儗乕僔儑儞偺條巕偱偡丅傎傫偺30悢儅僀僋儘sec偺僔儈儏儗乕僔儑儞偱偡偑丄寢峔側帪娫偑偐偐偭偰偄傑偡丅
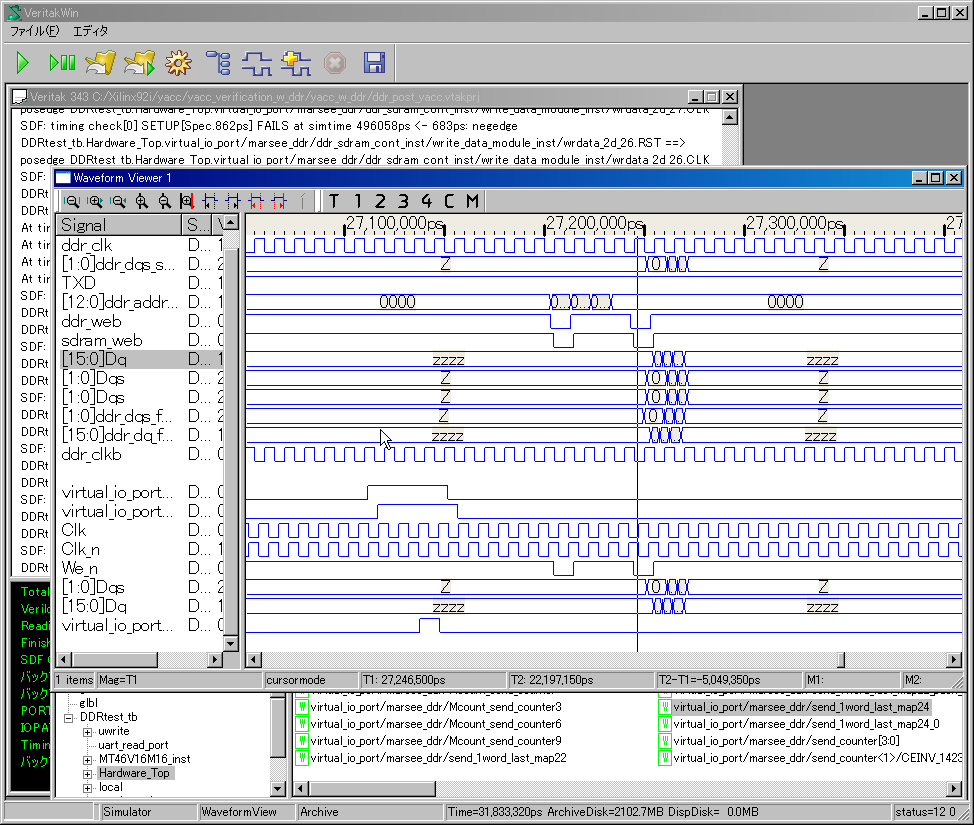
幚婡乮Sprtan3E starter-kit乯偱偺僥僗僩偺條巕偱偡丅Single丂W/R偱100枩僷僗傗偭偰傒傑偟偨丅乮僥儔僞乕儉偺儅僋儘偱摦嶌偝偣偰偄傑偡乯
偙偺僥僗僩偼丄摨帪偵YACC偺妱傝崬傒偺僠僃僢僋偵傕側傝傑偟偨丅
 .
.
堦斢怮偐偣偨乮揹尮僆儞偺傑傑傾僋僙僗偟側偄偱乯屻丄Read&Compare 偟傑偟偨丅僄儔乕偼敪惗偟傑偣傫偱偟偨丅
俉儚乕僪僶乕僗僩傾僋僙僗偱丄Write Once屻丄悢昐僥儔價僢僩丂儕乕僪僐儞儁傾偟偰No丂Error偱偟偨丅
壓偼丄僐儅儞僪偺椺偱偡丅
偙傟偱崱夞偺昡壙偼偍偟傑偄偱偡丅(3/23/2008婰乯
| 懠偺DDR僐儞僩儘乕儔IP儕儞僋 | Remarks | |
| 1 | 將嶳夞楬尋媶強 | spartan 3E 僗僞乕僞僉僢僩梡丅Verilog丂HDL.惂栺偺彂偒曽丄Primitive偺巜掕偺巇曽偑嶲峫偵側傝傑偡丅 |
| 2 | Wishbone巇條 | spartan 3E僗僞乕僞僉僢僩梡丅Verilog丂HDL.丂Wishbone僶僗捈寢丂micro32偵偮側偖僾儘僕僃僋僩傕恑峴拞偺傛偆偱偡丅 |
彨棃揑側僾儔儞丂
OS傪摦偐偡偨傔偺弨旛傪偡傞
- Wishbone丂UART偺幚憰丂->嵪傒
- OS傪儘乕僪偡傞偨傔偵偼丄儌僯僞偑昁梫偵側傝傑偡丅->丂偲傝偁偊偢丄DDR僐儞僩儘乕儔傪専徹偡傞偲偒偼丄娙扨側儌僯僞傪嶌傝傑偟偨丅丂->嵪傒
- DDR丂僐儞僩儘乕儔傪愙懕偡傞丂=>丂Wishbone僶僗偱彂偄偰傕傛偄偟丄偙傟偼師偺妝偟傒偵偟偨偄偲巚偄傑偡丅丂
- BOOT婡峔傪嶌傞丂亖亜愜妏EthernetPHY偑偁傞偺偱丄偙傟傪棙梡偟偨偄偱偡偹丅DDR丂IP傪愙懕偡傞弨旛偼偱偒偨偺偱偡偑丄C僐儞僷僀儖偺搙偵僴乕僪傪僐儞僷僀儖偟偰1帪娫懸偨偝傟傞偺偼姮傝傑偣傫丅C僾儘僌儔儉僐儞僷僀儖->儘乕僪偺帺摦壔偑弌棃傟偽丄IP傗僼傽乕儉偺奐敪偑梕堈偵側傞偲巚偄傑偡丅慡偰偺RTL僜乕僗偑NYSL偱丄帺暘偺RTL偲C僐乕僪傪偡偖偵幚尡丒専徹偱偒傞丄偦偆偄偆僾儔僢僩僼僅乕儉偵偡傞偙偲偑栚昗偱偡丅丂
- SD僇乕僪愙懕
丂丂丂丂丂
丂=>埥偄偼丄僐儞僷僋僩僼儔僢僔儏偲偄偆庤偑偁傞偐傕偟傟傑偣傫丅偙偪傜偺曽偼丄悢杮偲偄偆栿偵偼峴偐側偄偱偡偑丄揮憲儗乕僩偑崅偄偺偱丄傛傝幚梡揑偐傕偟傟傑偣傫丅IP偲偟偰傑偲傑偭偰偄傞傕偺偑岞奐偝傟偰偄傑偡丗IDE 僐儞僩儘乕儔 Shallot http://homepage3.nifty.com/~Natsutan/ide/shallot.html丂(僔儈儏儗乕僞傕Veritak傪巊傢傟偰偄傞偺偱丄億乕僩傕娙扨偐傕偟傟傑偣傫丅IDE偲偄偆偺偼丄愄偺僴乕僪僨傿僗僋偺僀儞僞乕僼僃乕僗偱偡丅乯
SD僇乕僪偺SPI偵偮偄偰偼丄http://elm-chan.org/docs/mmc/mmc.html丂偵徻偟偔彂偐傟偰偄偰偲偰傕嶲峫偵側傝傑偡丅乮FAT傾僋僙僗僪儔僀僶傕岞奐偝傟偰偄傑偡丅乯丂
幚憰偼丄摉暘帪娫偑庢傟側偄偺偱戝暘愭偵側傝傑偡丅
Q.DWM晅榐丂XC3S250E偵嵹傞偱偟傚偆偐丠
丂偼偄丅僉儍僢僔儏梕検傪偄偠傟偽丄LUT悢揑偵偼梋桾偱偡丅SD僇乕僪傪庡儊儌儕偲偡傞32價僢僩僾儘僙僢僒偼丄柺敀偄偐傕偟傟傑偣傫丅昅幰傕堦偮僉乕僾偟偰偍偙偆偲巚偄傑偡丅側偵偣PC偲摨偠埵偺儊儌儕傪愊傫偱傕偙偺壙奿丄枺椡偱偡丅乮2擭慜偺晅榐偱偼丄4KB偱巐嬯敧嬯偟傑偟偨丅乯
丂
OS偺億乕僩丂丗側偵偐僞乕僎僢僩傪峣偭偰MMU側偟偱憱傞OS傪億乕僩偟偰傒偨偄偲巚偄傑偡丅
偦偺愭偼丠
- TLB偺僒億乕僩
- LINUX宯OS偺堏怉
- SDRAM僐儞僩儘乕儔偺億乕僩
- 崅懍壔
- 僆儕僕僫儖CPU偵偡傞丅丅