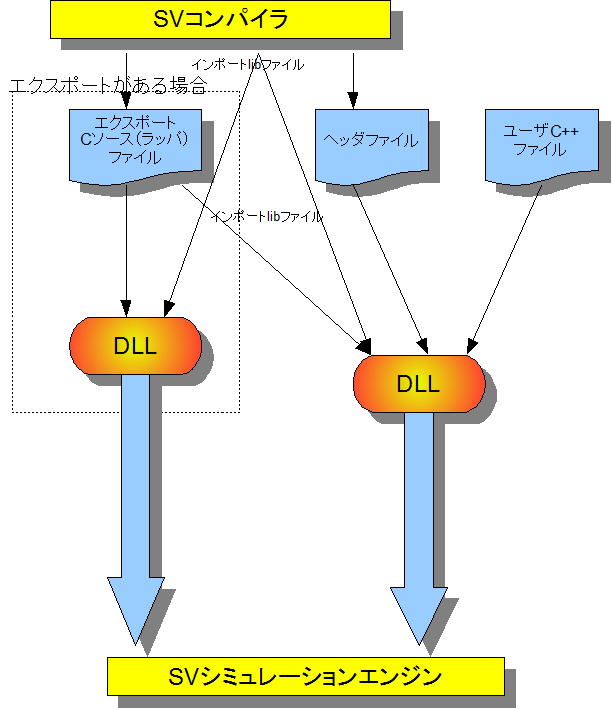
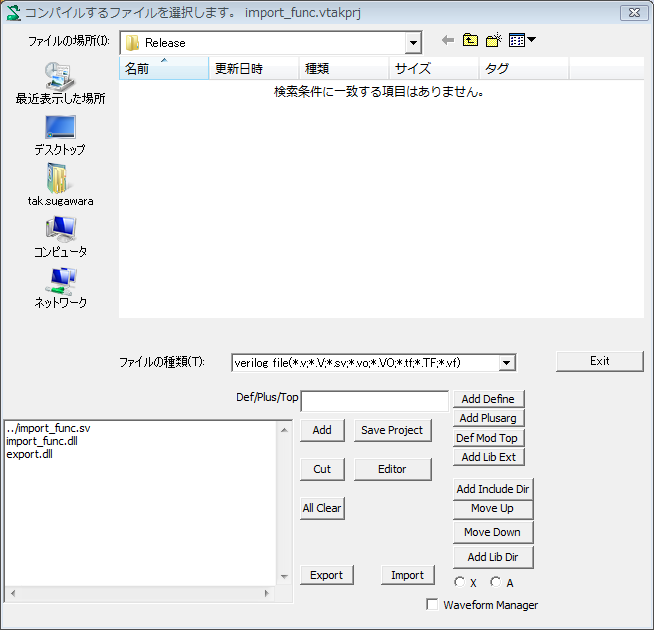
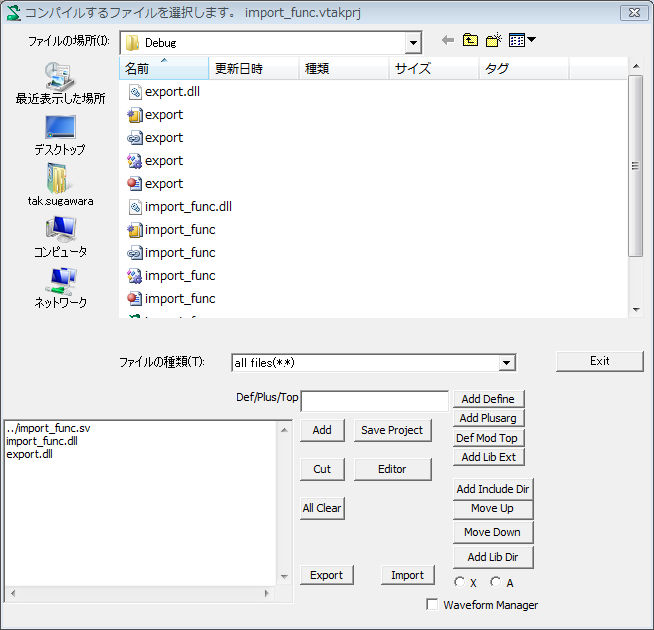
VeritakSV DPI-C/DPI-SC Tutorial 1.DPI-Cコンパイル、リンク手順 1.1 フロー 1.2 サンプル 1.2.1 完成後のVeritakプロジェクト
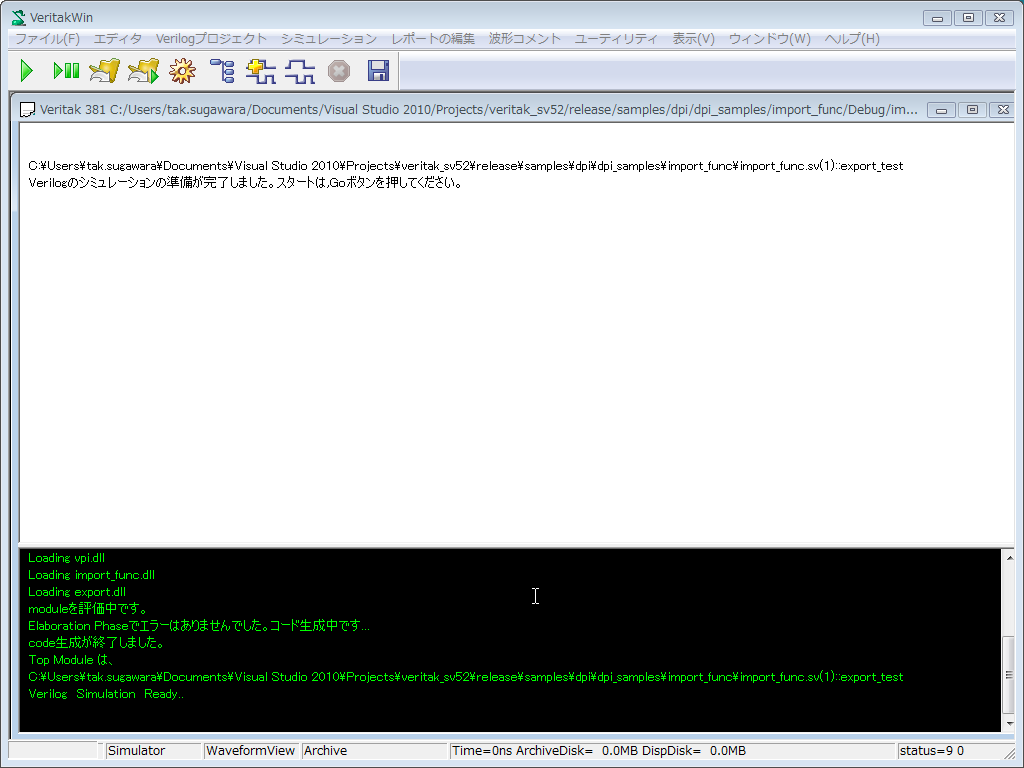
C:\Users\tak.sugawara\Documents\Visual Studio 2010\Projects\veritak_sv52\release\samples\dpi\dpi_samples\import_func\import_func.sv(1)::export_test
Verilogのシミュレーションの準備が完了しました。スタートは,Goボタンを押してください。
***** Veritak SV Engine Version 0.34 Build Jun.4.2010 *****
私は、C のimport_func()です。
私は sv_inc 関数です。
私はCです。 sv_incを呼び出した結果=101が返ってきました 。
vpi_printf:私は、C のimport_func()です 。
私は sv_inc 関数です。
vpi_printf:私はCです。 sv_incを呼び出した結果=101が返ってきました 。
---------- シミュレーションを終了します。time=0ns
**** Test Done. Total 1.00[msec] ****
となります。
module export_test;
import "DPI-C" context function void import_func () ; //Exportするにはimportが必要
export "DPI-C" function sv_inc; //Export宣言では、ファンクション名・タスク名しか書かない
function int sv_inc( int i1) ; //Cから呼ばれるExportファンクション
$display ( "私は sv_inc 関数です。" ) ;
return i1+ 1 ;
endfunction
initial
import_func() ; //Cのインポートファンクションを呼ぶ
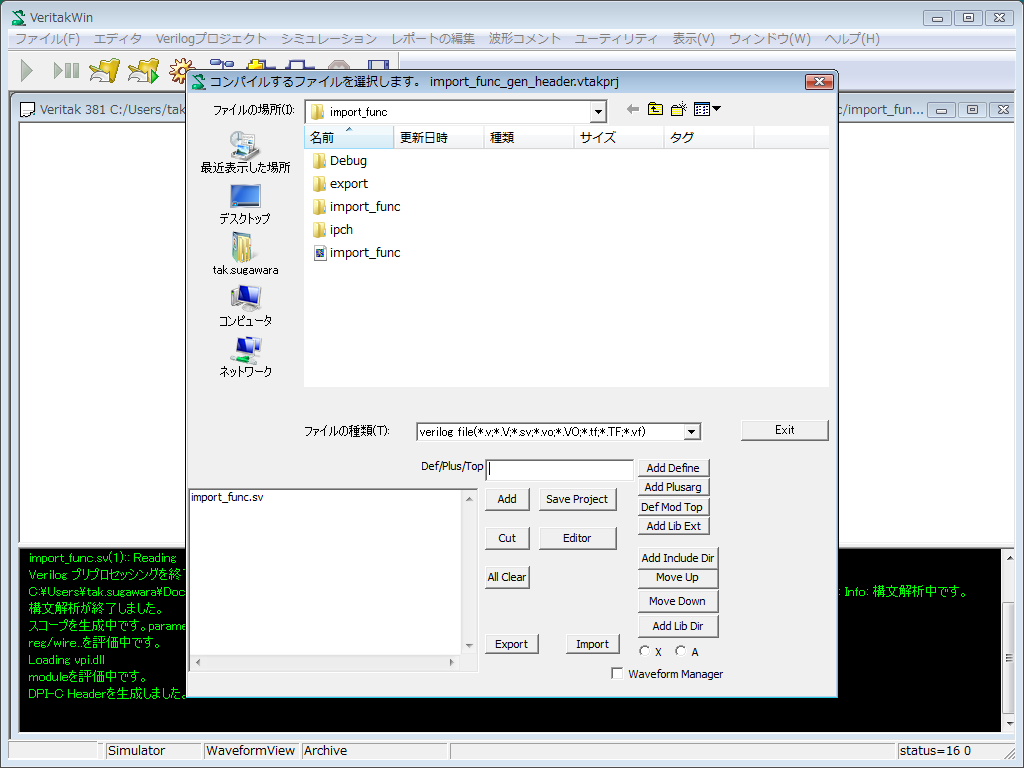
endmodule です。1.2.2 DLLの生成 1.2.2.1 C Headerファイルの生成 DPI-IF Generate C Header
dpi_veritak_export.h
/* Copyright 2010 www.sugawara-systems.com
* Note:
* This file is automatically generated.
* Please do not edit this file - you will lose your edits.*/
#ifndef INCLUDED_DPIHEADER
#define INCLUDED_DPIHEADER
#ifdef __cplusplus
#define DPI_LINK_DECL extern "C"
#else #define DPI_LINK_DECL
#endif
#include "svdpi.h"
DPI_LINK_DECL DPI_DLLESPEC
void import_func() ;
DPI_LINK_DECL DPI_DLLISPEC
int sv_inc( int ) ;
#endif
dpi_veritak_c_export.c
/* Copyright 2010 www.sugawara-systems.com
* Note:
* This file is automatically generated.
* Please do not edit this file - you will lose your edits.*/
#ifndef INCLUDED_DPIHEADER
#define INCLUDED_DPIHEADER
#ifdef __cplusplus
#define DPI_LINK_DECL extern "C"
#else #define DPI_LINK_DECL
#endif
#include "svdpi.h"
DPI_LINK_DECL DPI_DLLESPEC
int sv_inc( int i1)
{
}
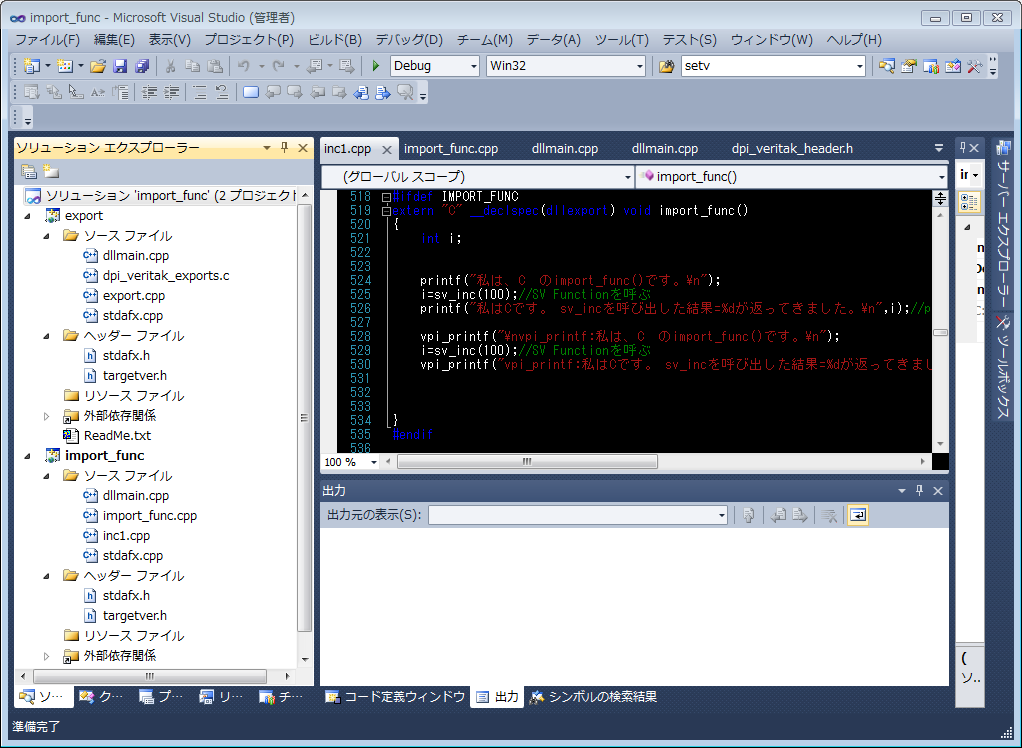
1.2.2.2 エクスポートファイルのコンパイル - export.dllの生成 Express版 でも機能、性能に制約/違いはありません。
samples\dpi\dpi_samples\import_func\Debug
C/C++ ->追加のインクルードディレクトリ
C/C++ ->プリコンパイル済みヘッダー
全般 ->文字セット
テクニカルノートcの関数の中身が空でwarning が出ていますが無視してください。この関数は、VeritakSVでは、単なるWrapperとして使っています。次のプロジェクトでは、
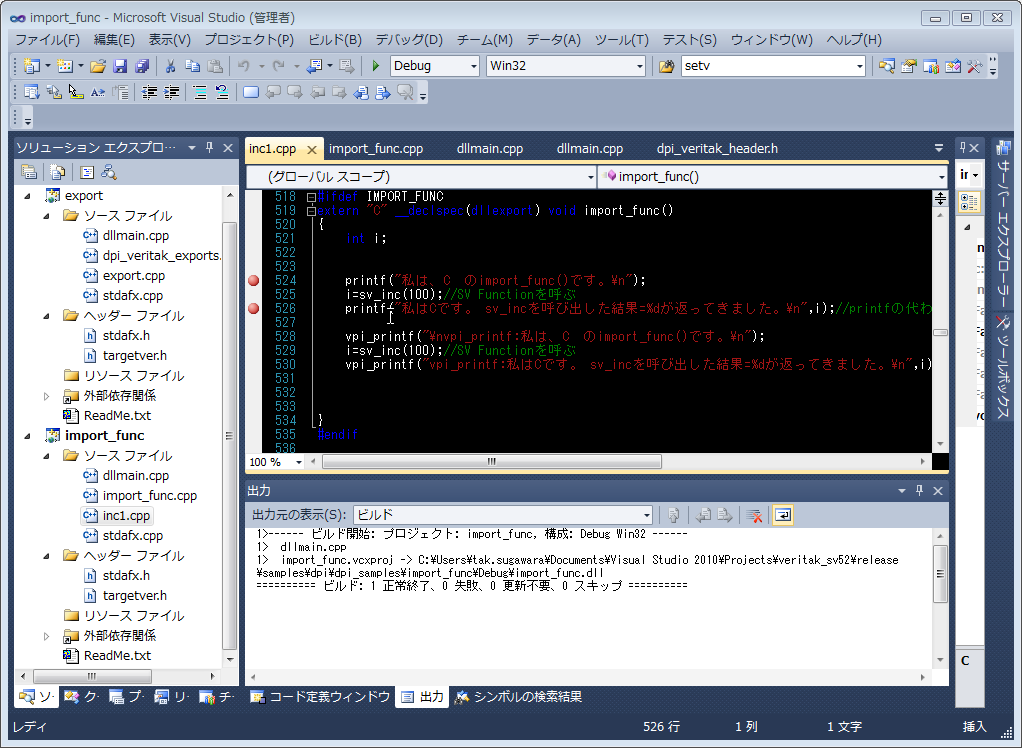
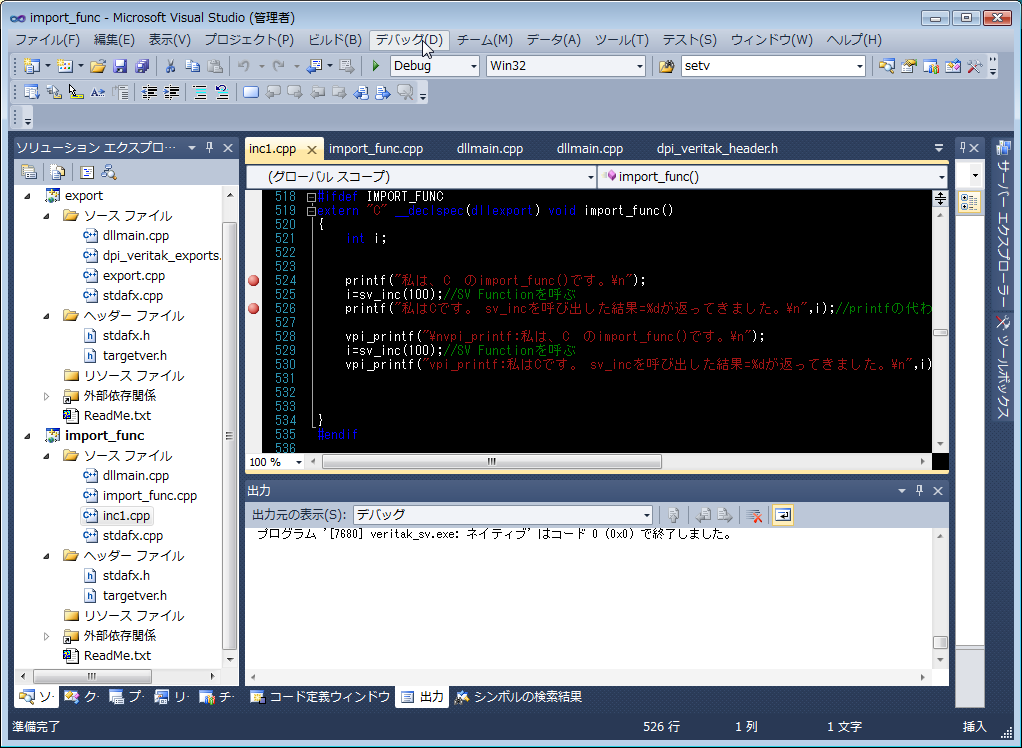
1.2.2.3 インポートファイルのコンパイル - import_func.dllの生成
samples\dpi\dpi_samples\import_func\Debug
C/C++ ->追加のインクルードディレクトリ
C/C++ ->プリコンパイル済みヘッダー
C/C++ -> プリプロセッサの定義
全般 ->文字セット
リンカー -> 入力 -> 追加の依存ファイル
特に、リンカーで、上で生成したexport.lib とライブラリフォルダにあるveritak_sv.lib
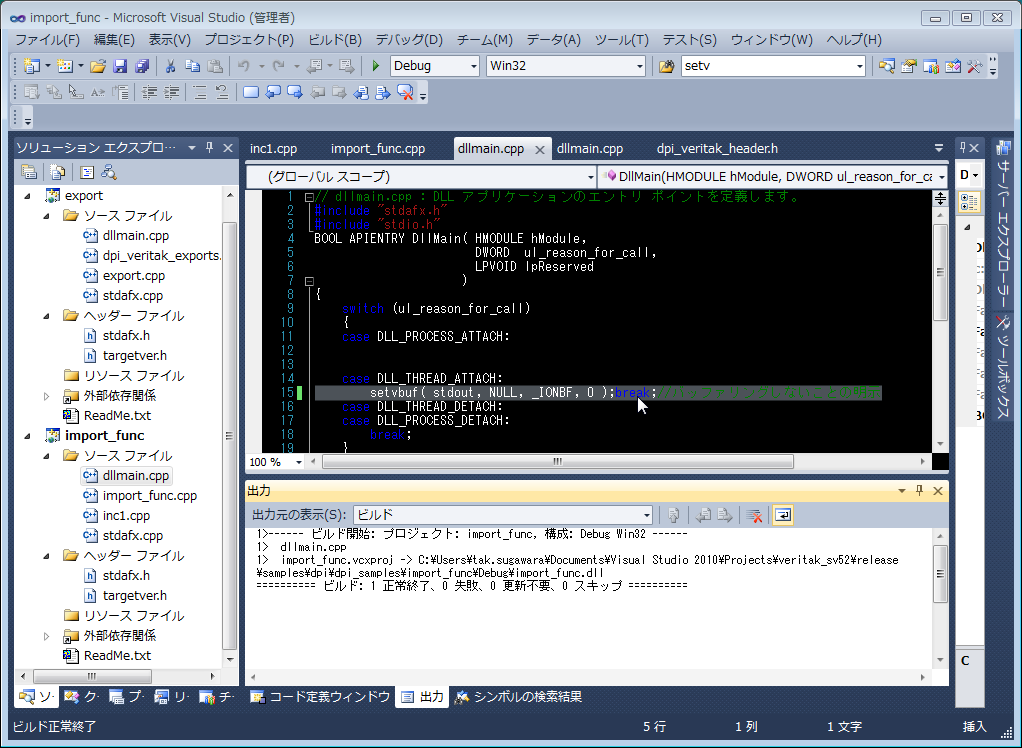
を追加することにご注意ください。バッファリングの問題について DPI-IF No Buffer 基本的には、上のようにすればよいのですが、大量にテキストを吐く場合には、バッファリングなしだと遅くなってしまいます。その場合には、上の対策は実行せずにprintfの代わりに、VPI系の構文
vpi_printf を呼び出します。vpi_printfと $displayは、結局のところ、同じC−RUNTIMEを呼び出すので、バッファリング付きでも問題なく実行できます 。 2 DPI-Cのデバッグ
2.1プロジェクトのロード
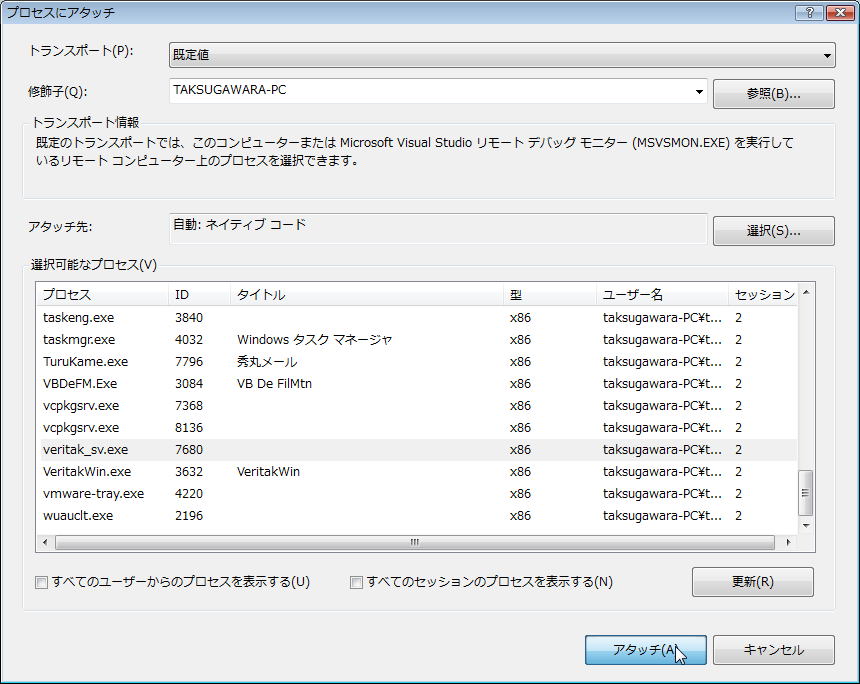
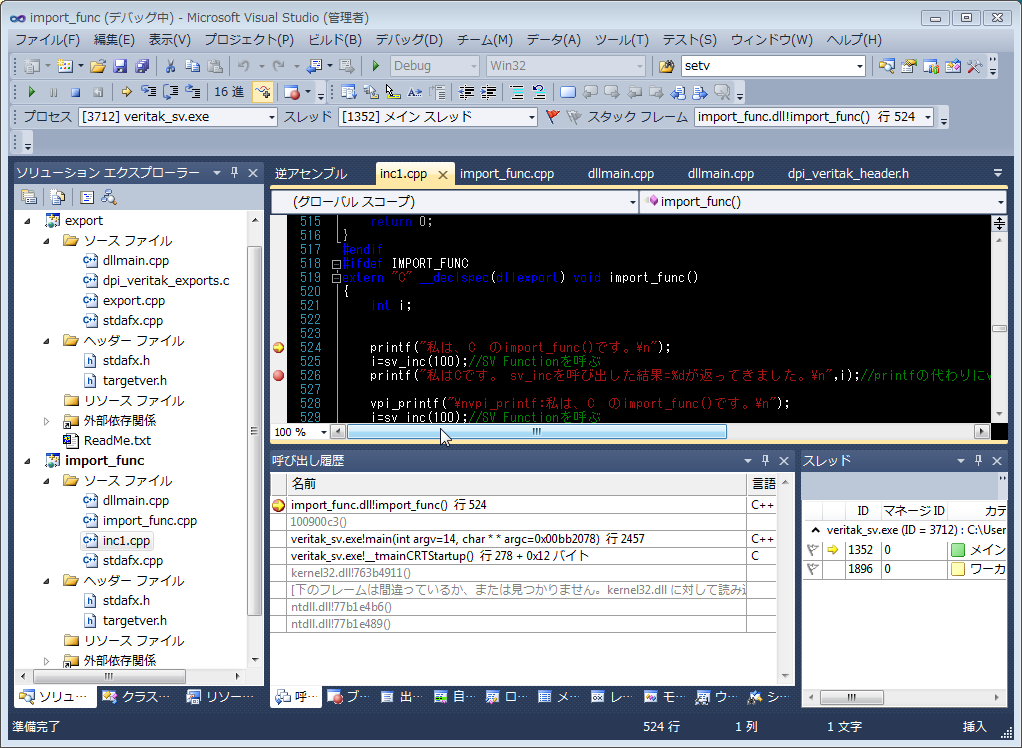
samples\dpi\dpi_samples\import_func\Debug\import_func.vtakprj2.2ブレークポイントの設定 2.3デバッガのアタッチ デバッグ ー>プロセスにアタッチ を押します。アタッチ を押します。2.4 Goボタン F5 キーを押すと実行が再開し次のブレークポイントで止まります。さらに押すとシミュレータに制御が戻り最後まで実行します。デバッガは一つしかアタッチできない
シングル行実行
ブレークポイント設定
ツールチップによる現在値の確認
を行うことができますが、これもVeritakSV搭載のプロセスデバッガによるものです。VisualStudioと同じような原理で動作するデバッガです。この手のデバッガは、アタッチした後でも、速度の低下は殆どないという利点がある反面、アタッチできるデバッガは、一つという制限があります。つまり、HDLソース上でブレークポイントを置きつつ、DPI-Cのコードデバッグを行うことが(今のところVeritakSVα0.35現在)できません。シミュレーション ー>デタッチ
3.SystemCのシミュレーション
VeritakSVでは、SystemCシミュレーションカーネルを統合しており、SystemCのシミュレーションをすることができます。また、OSCIシミュレータのセマンティクスを維持しており、SVとの通信がなければ、全く同じ挙動になります。 次のようなシミュレーションが可能です。
SystemC単独
VerilogHDL単独
VerilogHDLからSystemCのインスタンス化
SystemCからVerilogHDLのインスタンス化
1-4の組み合わせ
DPI-SC
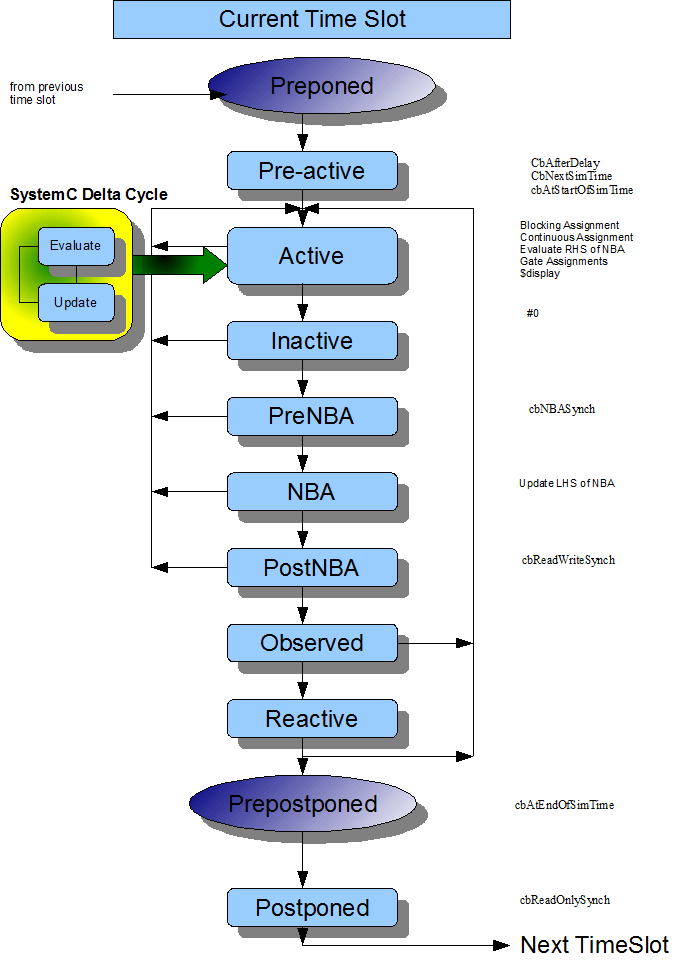
3.0.1 統合カーネルのスケジューラ
一方、SystemVerilogの1タイムスロットは、下のように領域に分けられます。SystemVerilogがなぜこのような複雑な状態遷移を持つのかは、歴史的な経緯もあり触れません。各領域(region)の意味については、以下のサンーバースト社の論文(英文)が詳しいです。http://www.sunburst-design.com/papers/CummingsSNUG2006Boston_SystemVerilog_Events.pdf 3.0.2 VerilogHDLとSystemCのシミュレーションの仕組み
SC_METHODは、 wait()が記述できない
SC_THREADでは、最低一つのwait()が必要
SC_METHODからSC_THREADを呼ぶことはできない
....
は、VerilogHDLのルール
functionでは、イベント(wait や、@ )やDelay構文を書けない
always プロセス中には、最低一つのイベントもしくはDelay構文を置かなければいけない
functionから、task を呼べない
.. と、なんだか似たところがあります。実際、どちらもイベントドリブンのシミュレーション言語で、
の二つのソフトウェア要素から成ります。言語間で呼び名は、違ってもソフトウェアの視点からは同じものです。
SystemC
VerilogHDL
記憶
C関数
SC_METHOD
function
記憶を持たない
スレッド
SC_THREAD
task
イベント構文で、スレッドを抜ける。イベントトリガによりイベント構文の次にある文の実行に戻る。
3.0.2.1 C関数は組み合わせ回路 3.0.2.2 順序回路は、スレッド 3.1 SystemC単独のシミュレーション
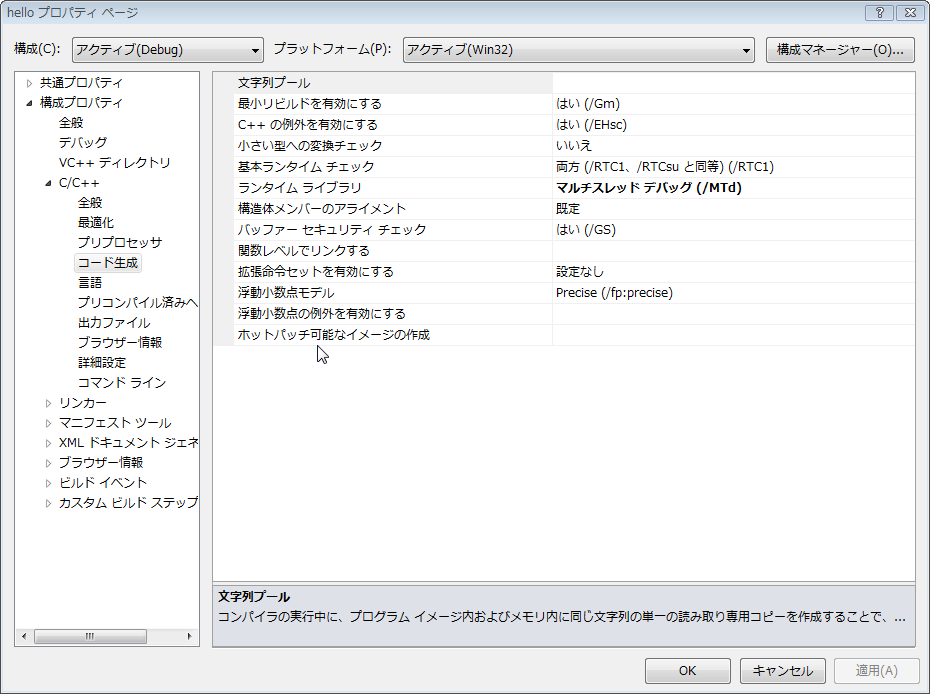
3.1.1Visual C++の設定
以下の設定に注意します。
3.1.1.1 Cランタイムライブラリは"マルチスレッドDLL"ではなく、STATICライブラリであるマルチスレッド (デバッグ)を使う
添付しているSystemC.lib は、スタティックライブラリです。そのために同じスタティック系のライブラリを使用してください。
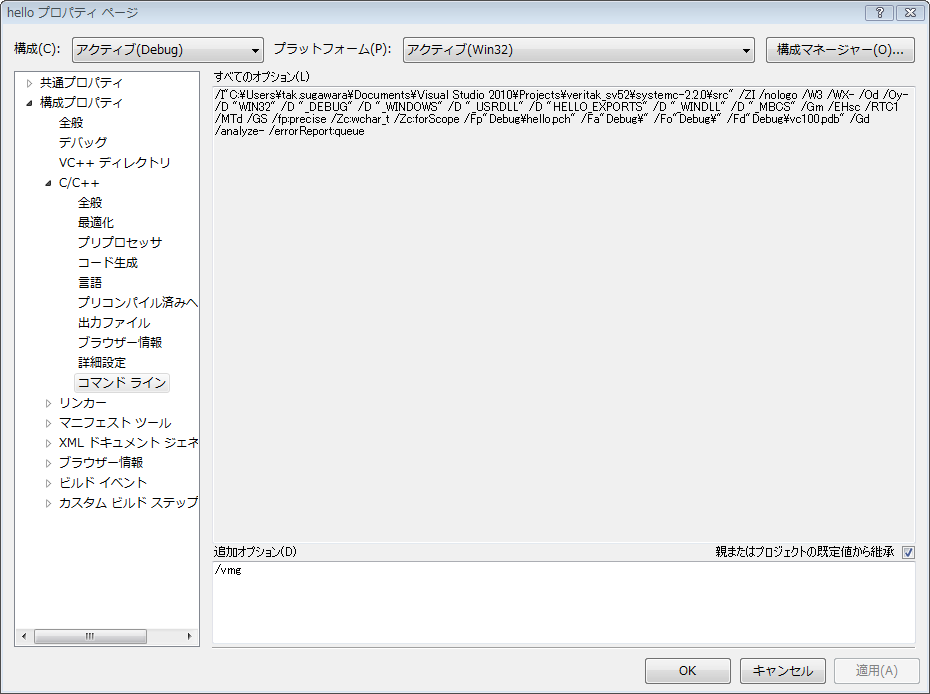
3.1.1.2 vmg を下のように追加する
その他の設定
文字セット マルチバイト
プロコンパイルヘッダー 使用しない
追加のインクルードディレクトリ
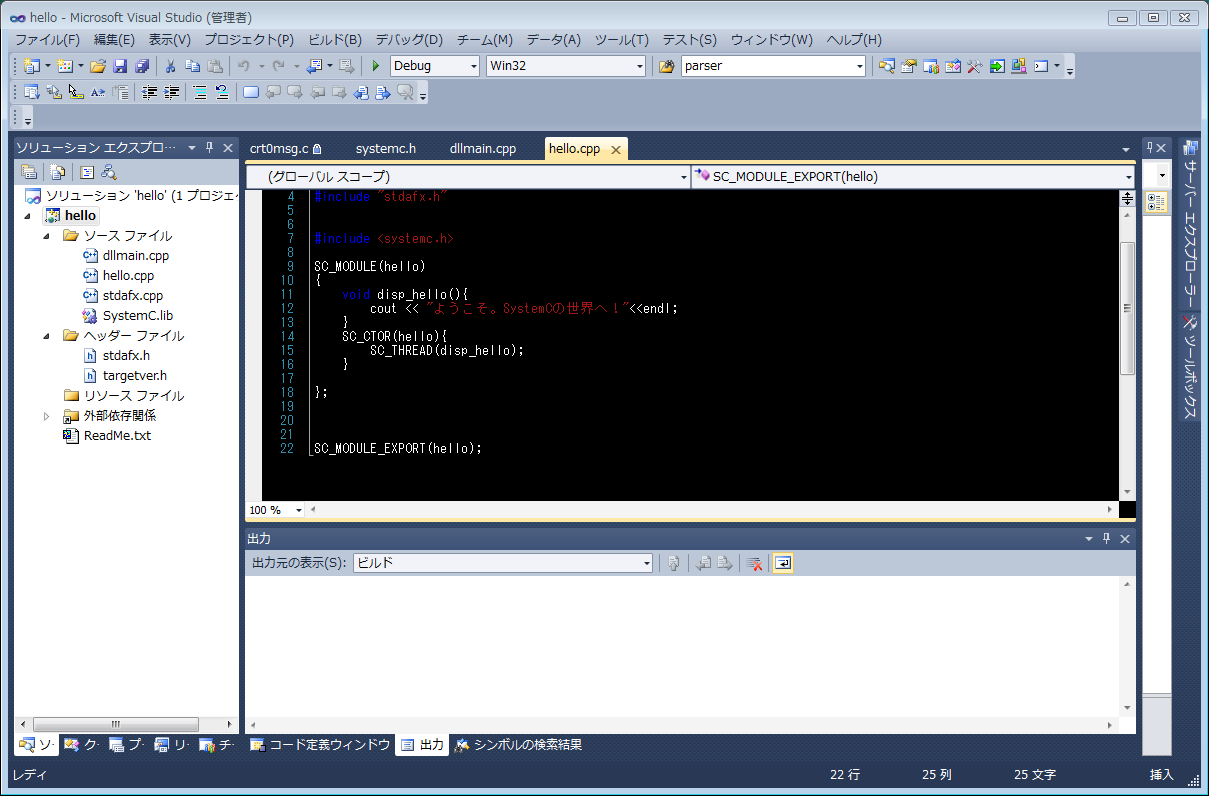
を行います。3.1.2 systemc ソース形式 SC_MODULE_EXPORT SC_MODULE_EXPORT
#include <systemc.h>
SC_MODULE ( hello){
void disp_hello(){
cout << "ようこそ。SystemCの世界へ!" << endl;
}
SC_CTOR ( hello){
SC_THREAD ( disp_hello) ;
}
} ;
SC_MODULE_EXPORT ( hello) ;
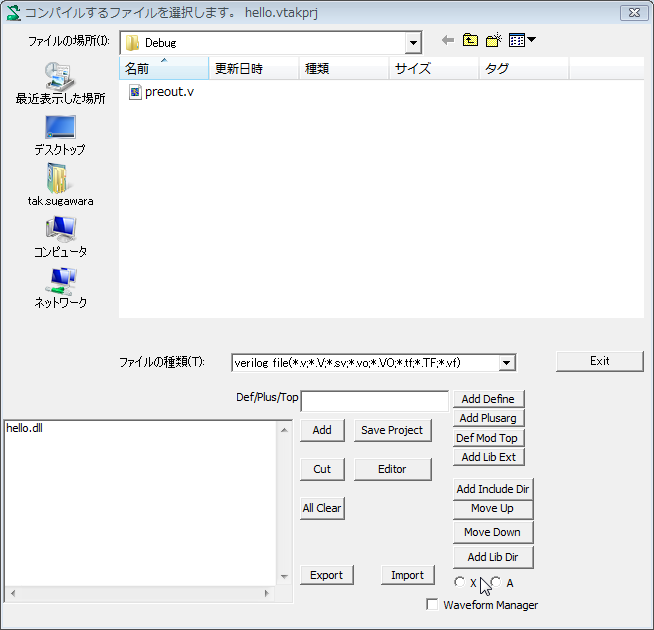
3.1.3 ビルド 3.1.4 Veritak プロジェクト 3.1.5 RUN
結果です。
***** Veritak SV Engine Version 0.36 Build Jul.10.2010 *****
Veritak-SystemC Simulation Kernel Initialized. Jul.10.2010.
ようこそ。SystemCの世界へ!
---------- シミュレーションを終了します。time=0ns
**** Test Done. Total 0.00[msec] ****
3.2 SystemCとVerilog HDLの並列シミュレーション
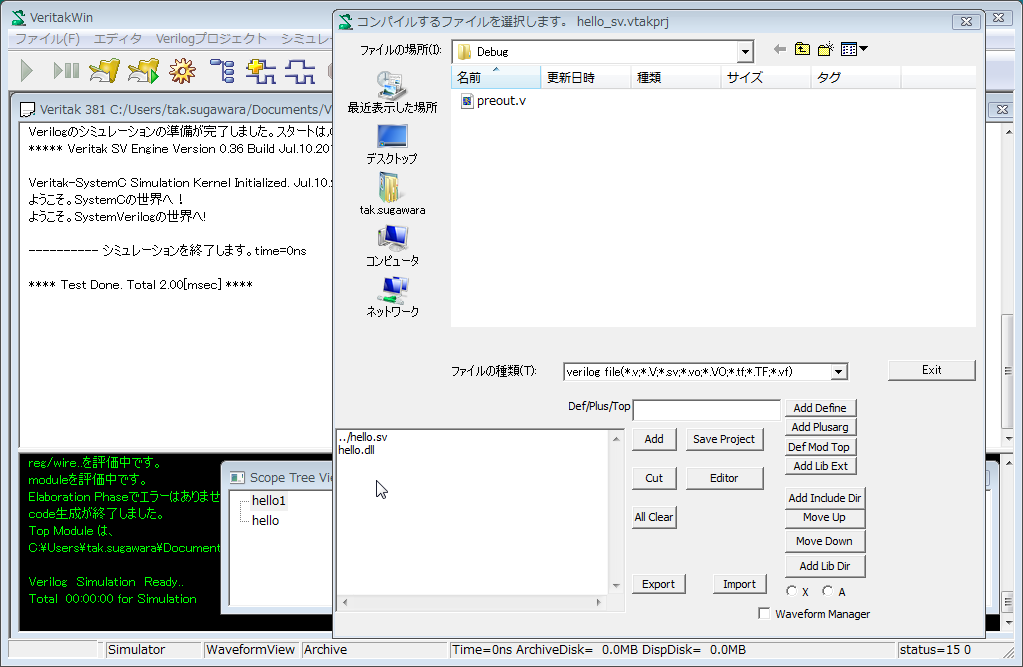
次のソースをhello.sv としてプロジェクトに追加します。
module hello1;
initial $display( "ようこそ。SystemVerilogの世界へ!" ) ;
endmodule
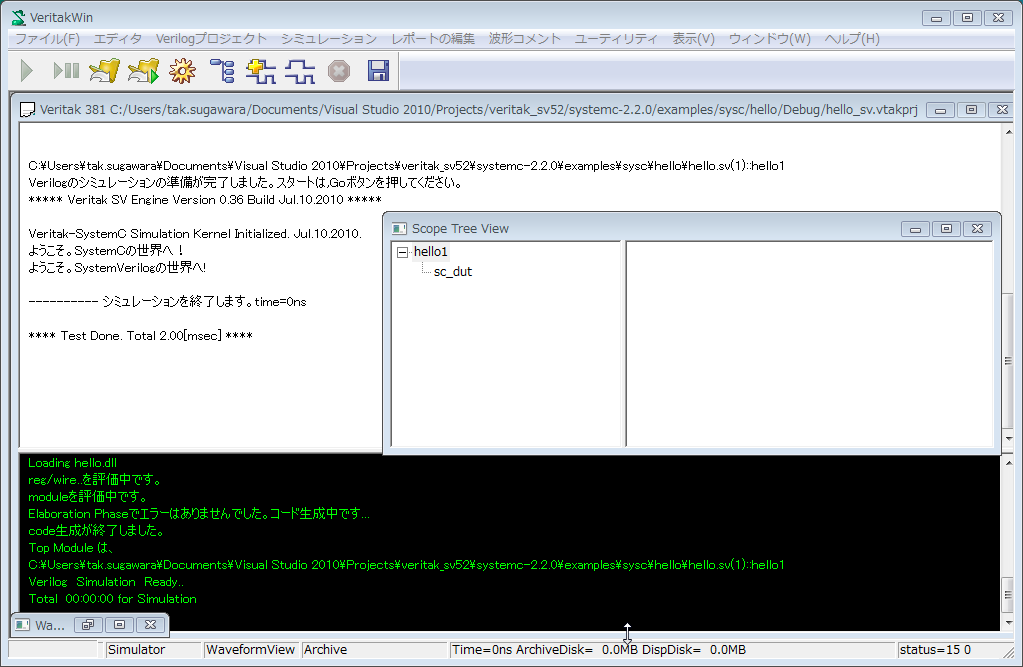
3.3 SystemCのインスタンス化 3.3.1 ポートを持たないSystemCモジュールのインスタンス化
module hello1;
initial $display( "ようこそ。SystemVerilogの世界へ!" ) ;
hello sc_dut() ; //SystemC モジュールhelloのインスタンス化
endmodule ;
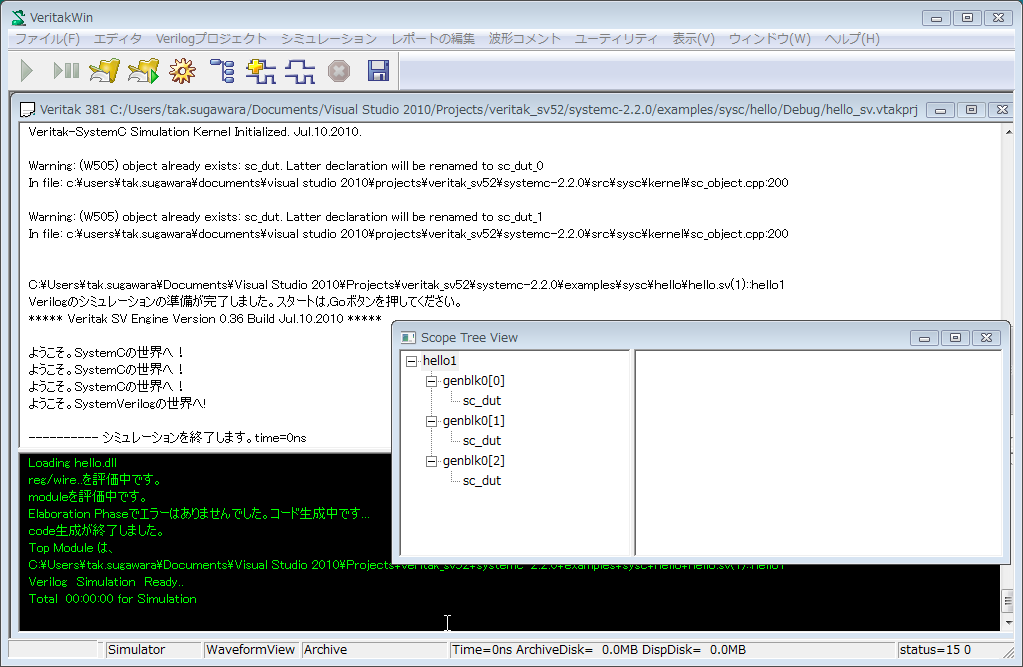
generateによるsystemc モジュールのインスタンス化
module hello1;
initial $display( "ようこそ。SystemVerilogの世界へ!" ) ;
for ( genvar g1= 0 ; g1< 3 ; g1++ )
hello sc_dut() ; //systemc モジュールのインスタンス化
endmodule ;
module hello1;
initial $display( "ようこそ。SystemVerilogの世界へ!" ) ;
reg [ 13 : 0 ] a;
wire [ 7 : 0 ] out;
hello dut( .in1( a) , .out1( out)) ; //SystemC Moduleのインスタンス化 名前結合で接続
always @ ( out) begin //SystemCからの信号をセンスする
$display( " Veriloag Reading : out=%d time=%t" , out, $time) ;
end
initial begin
$timeformat( - 9 , 3 , "ns" , 8 ) ;
a= 0 ;
repeat ( 4 ) begin
a= a+ 1 ;
$display( "Verilog Writing: a=%3d sv time=%t" , a, $time)
;# 1 ;
end
end
endmodule
SC_MODULE ( hello
){
sc_in < sc_int < 8 >> in1; //Verilog HDLに接続するポート
sc_out < sc_int < 8 >> out1; //Verilog HDLに接続するポート
SC_CTOR ( hello) : //コンストラクタ
in1( "in1" ) ,out1( "out1" ) //接続するVerilogポート名と同じにする
{
SC_THREAD ( disp_hello) ;
SC_METHOD ( disp_in1) ;
sensitive << in1;
}
void disp_in1(){ //in1をセンス
cout << "--------------------------------- SystemC reading: :in1=" << in1.read () << " sc time=" << sc_time_stamp() << endl;
}
void disp_hello(){
wait ( 1000 ,SC_NS ) ;
out1.write ( 0 ) ;
wait ( 1 ,SC_PS ) ;
cout << "--------------------------------- SystemC Wriing : out1=" << out1.read () << " sc_time=" << sc_time_stamp() << endl;
for ( int i= 0 ; i< 5 ; i++ ){
wait ( 100 ,SC_NS ) ;
out1.write ( out1.read () + 1 ) ;
wait ( 1 ,SC_PS ) ;
cout << "-------------------------------- SystemC Wriing : out1=" << out1.read () << " sc_time=" << sc_time_stamp() << endl;
}
cout << "---------------------------------- ようこそ。SystemCの世界へ!" << endl;
}
} ;
SC_MODULE_EXPORT ( hello) ;
結果です。左側が Verilogモジュール側の出力、右側が SystemCモジュールからの出力です。
C:\Users\tak.sugawara\Documents\Visual Studio 2010\Projects\veritak_sv52\systemc-2.2.0\examples\sysc\hello\systemc_instance.sv(1)::hello1
Verilogのシミュレーションの準備が完了しました。スタートは,Goボタンを押してください。
***** Veritak SV Engine Version 0.36 Build Jul.10.2010 *****
--------------------------------- SystemC reading: :in1=0 sc time=0 sec
ようこそ。SystemVerilogの世界へ!
Verilog Writing: a= 1 sv time= 0.000ns
--------------------------------- SystemC reading: :in1=1 sc time=0 sec
Verilog Writing: a= 2 sv time= 1.000ns
--------------------------------- SystemC reading: :in1=2 sc time=1 ns
Verilog Writing: a= 3 sv time= 2.000ns
--------------------------------- SystemC reading: :in1=3 sc time=2 ns
Verilog Writing: a= 4 sv time= 3.000ns
--------------------------------- SystemC reading: :in1=4 sc time=3 ns
--------------------------------- SystemC Wriing : out1=0 sc_time=1000001 ps
Veriloag Reading : out= 1 time=1100.001ns
-------------------------------- SystemC Wriing : out1=1 sc_time=1100002 ps
Veriloag Reading : out= 2 time=1200.002ns
-------------------------------- SystemC Wriing : out1=2 sc_time=1200003 ps
Veriloag Reading : out= 3 time=1300.003ns
-------------------------------- SystemC Wriing : out1=3 sc_time=1300004 ps
Veriloag Reading : out= 4 time=1400.004ns
-------------------------------- SystemC Wriing : out1=4 sc_time=1400005 ps
Veriloag Reading : out= 5 time=1500.005ns
-------------------------------- SystemC Wriing : out1=5 sc_time=1500006 ps
---------------------------------- ようこそ。SystemCの世界へ!
---------- シミュレーションを終了します。time=1500006ps
**** Test Done. Total 4.00[msec] ****
3.4 Verilog モジュールのインスタンス化と接続
module counter16( input clk, input enable, output bit [ 3 : 0 ] counter) ;
always @ ( negedge clk) begin
if ( ! enable) counter<= 0 ;
else counter <= counter+ 1 ;
end
endmodule
上のモジュールをインスタンス化するには、下のようなSystemCの階層でラッパモジュールが必要になります。VerilogHDL側のモジュール名、ポート名をそのまま
#include <systemc.h>
class counter16 : public sc_core:: sc_module
{
public :
sc_in < bool > clk,enable; //verilog ポート方向に合わせる
sc_out < sc_uint < 4 >> counter; //verilog ポート方向に合わせる
counter16 ( sc_module_name nm) :
sc_core:: sc_module ( nm,"counter16" ) , //Verilog HDL側のモジュール名として参照される
clk( "clk" ) ,enable( "enable" ) ,counter( "counter" )//Verilog HDL側のポート名に合わせる
{
}
} ;
このラッパーモジュールを制御するSystemCテストベンチが下の記述です。 このテストベンチは、上のcounter16モジュールをインスタンス化しています。enable
端子を制御しています。
SC_MODULE ( test_bench
){
counter16 dut;
sc_signal < sc_uint < 4 >> counter; //モニタ用
sc_clock clock ; //テストベンチクロック源
sc_signal < bool > enable; //制御信号
SC_CTOR ( test_bench) :
dut( "counter16" ) ,
clock ( "clock" ,10 ,SC_NS ,0.5 ,1 ,SC_NS ,true )//レースを防ぐために1ns後に発振開始 Duty 50% 10ns サイクル Pos
{
dut.clk ( clock ) ;
dut.counter ( counter) ;
dut.enable ( enable) ;
SC_THREAD ( enable_control) ;
SC_METHOD ( disp_counter) ;
sensitive << counter;
}
void enable_control(){
wait ( 1000 ,SC_NS ) ;
cout << "イネーブル端子をアサートしました。time=" << sc_time_stamp() << endl;
enable.write ( true ) ;
}
void disp_counter(){ //モニタ
cout << "counter=" << counter.read () << " time=" << sc_time_stamp() << endl;
}
} ;
SC_MODULE_EXPORT ( test_bench) ;
全体の記述を通して、トップ階層は、test_benchになります。SC_MODULE_EXPORTでsystemc側のトップ階層を指示しています。
***** Veritak SV Engine Version 0.36 Build Jul.10.2010 *****
counter=0 time=0 sec
イネーブル端子をアサートしました。time=1 us
counter=1 time=1006 ns
counter=2 time=1016 ns
counter=3 time=1026 ns
counter=4 time=1036 ns
counter=5 time=1046 ns
counter=6 time=1056 ns
counter=7 time=1066 ns
counter=8 time=1076 ns
counter=9 time=1086 ns
counter=10 time=1096 ns
counter=11 time=1106 ns
counter=12 time=1116 ns
counter=13 time=1126 ns
counter=14 time=1136 ns
counter=15 time=1146 ns
counter=0 time=1156 ns
...
このように、Verilogのテストベンチをsystemcで記述することができます。3.5 DPI-SC systemcとverilog HDL間の通信 3.5.1 ビルドの手順
SVソースの作成
1に対して、veritakプロジェクトを作成し、Cヘッダ/ソースファイルの生成する
2のソースのDLL化 (exportプロジェクトのビルド)
systemc ユーザプロジェクトのDLL化(下の例ではdpi_sc_test)
SVソースとDLLをVeritakプロジェクトに入れてRun
SVソースです。systemcのスレッドから呼び出されるtaskのみ"DPI-SC"
で宣言します。書法はDPI-Cに同じです。
module dpi_sc_dut;
export "DPI-SC" context task wait_task;
import "DPI-C" function void get_data_fm_systemc( inoutint ) ;
reg clock= 0 ;
always # 10 clock=~ clock;
task wait_task( input int nclks) ;
int data ;
$display( "\t\t\t\t\t\t SV task に入りました。 nclks=%3d 時刻:%t" , nclks, $realtime) ;
repeat ( nclks) begin
@ ( posedge clock) ;
get_data( data ) ;
end
# 1 ;
$display( "\t\t\t\t\t\t SV task を終了します。 時刻:%t" , $realtime) ;
endtask
function void get_data( inout int data ) ;
$display( "\t\t\t\t\t\t DPI-Cを使ってSystemCクラス内データを取得します。時刻:%t" , $realtime) ;
get_data_fm_systemc( data ) ;
$display( "\t\t\t\t\t\t 取得したSystemCクラスメンバーデータは%3dです。時刻:%t" , data , $realtime) ;
endfunction
initialbegin
$timeformat( - 9 , 3 , "ns" , 8 ) ;
$display( "\t\t\t\t\t\t SystemVerilogの世界へようこそ!" ) ;
# 1000 $finish;
end
endmodule
SystemC ソースです。
#include <systemc.h>
#include "dpi_veritak_header.h"
struct hello;
static hello* hello_ptr= 0 ;
void register_instance( hello* h ){ hello_ptr= h; }
hello* get_instance (){ return hello_ptr; }
SC_MODULE ( hello
){
int my_data;
void get_data_fm_systemc( int * data_ptr ){
cout << "SystemCメンバー関数が呼び出されました。" << endl;
cout << "my_data " << my_data<< "をセットします。" << endl;
* data_ptr= my_data++ ;
}
void disp_hello(){
cout << "ようこそ。SystemCの世界へ!" << endl;
wait ( 100 ,SC_NS ) ;
cout << "Systemc time=" << sc_time_stamp() << " DPI-SCを使って" << endl;
cout << "SystemVerilogの時間消費タスクを呼び出します。" << endl;
wait_task( 3 ) ; //DPI-SC export task
cout << "Systemc time=" << sc_time_stamp() << " DPI-SCを使って" << endl;
cout << "SystemVerilogタスクから戻りました。" << endl;
}
SC_CTOR ( hello){ //コンストラクタ
SC_THREAD ( disp_hello) ; //スレッド
register_instance( this ) ; //クラスオブジェクトをDPI-Cで接続する
my_data= 100 ;
}
} ;
SC_MODULE_EXPORT ( hello) ;
DPI_LINK_DECL DPI_DLLESPEC void get_data_fm_systemc( int * data ){
get_instance() - > get_data_fm_systemc( data) ;
}
Verilogのシミュレーションの準備が完了しました。スタートは,Goボタンを押してください。
***** Veritak SV Engine Version 0.36 Build Jul.10.2010 *****
Veritak-SystemC Simulation Kernel Initialized. Jul.10.2010.
ようこそ。SystemCの世界へ!
SystemVerilogの世界へようこそ!
Systemc time=100 ns DPI-SCを使って
SystemVerilogの時間消費タスクを呼び出します。
SV task に入りました。 nclks= 3 時刻: 100.000ns
DPI-Cを使ってSystemCクラス内データを取得します。時刻: 110.000ns
SystemCメンバー関数が呼び出されました。
my_data 100をセットします。
取得したSystemCクラスメンバーデータは100です。時刻: 110.000ns
DPI-Cを使ってSystemCクラス内データを取得します。時刻: 130.000ns
SystemCメンバー関数が呼び出されました。
my_data 101をセットします。
取得したSystemCクラスメンバーデータは101です。時刻: 130.000ns
DPI-Cを使ってSystemCクラス内データを取得します。時刻: 150.000ns
SystemCメンバー関数が呼び出されました。
my_data 102をセットします。
取得したSystemCクラスメンバーデータは102です。時刻: 150.000ns
SV task を終了します。 時刻: 151.000ns
Systemc time=151 ns DPI-SCを使って
SystemVerilogタスクから戻りました。
Info: $finishコマンドを実行します。time=1000000ps
**** Test Done. Total 3.00[msec] ****